
Fターム[5H505JJ24]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | 比例積分回路 (515)
Fターム[5H505JJ24]に分類される特許
21 - 40 / 515
モータ駆動制御装置
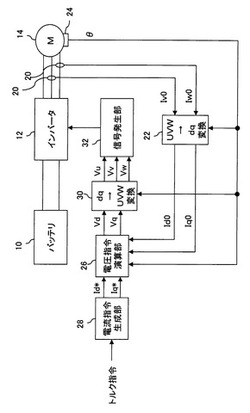
【課題】バッテリの過充電を確実に防止する。
【解決手段】バッテリ10からの直流電力をインバータ12で交流電力に変換しモータ14を駆動する。この際、モータの制御は、d軸電圧指令Vdとq軸電圧指令Vqを用いてベクトル制御する。そして、インバータ12をPWM制御するPWM固定モードを有し、このPWM固定モードにおいて、d軸電圧指令Vdを0にしても、前記モータにおけるq軸電流Iqが負となり前記モータから回生電流が発生する場合に、q軸電流Iqが0以上となるようにd軸電圧指令Vdまたは電圧指令ベクトルのq軸とのずれ角αを制御する。
(もっと読む)
永久磁石同期電動機駆動システムのパラメータ推定装置

【課題】本発明は、永久磁石同期電動機駆動システムのパラメータ推定装置を提供する。
【解決手段】本発明の推定装置は、リアルタイム磁束推定を介してインダクタンスと永久磁石による鎖交磁束を推定して、永久磁石同期電動機の運転性能を向上する。
(もっと読む)
回転機の制御装置及び回転角算出装置
【課題】R/Dコンバータ36bによって算出される回転角に含まれる遅れ誤差がモータジェネレータの制御に及ぼす影響を抑制することのできる回転機の制御装置を提供する。
【解決手段】遅れ補正量設定部B14において、モータジェネレータの回転子の回転速度ωが高いほど、回転角の進角側への補正量である遅れ補正量Cδを大きく設定する処理を行う。そして、加算部B15において、設定された遅れ補正量Cδによって上記回転角を補正する処理を行う。さらに、誤差補正部B16によって、回転角に含まれる変動誤差を除去する処理を行う。これら処理は、R/Dコンバータ36b内にて行われる。
(もっと読む)
モータの駆動装置、インバータ制御方法及びプログラム、空気調和機
【課題】モータを駆動させず、かつ、マイグレーションを速やかに解消すること。
【解決手段】直流電力を交流電力に変換し、空気調和機の圧縮機に設けられる圧縮機モータ5に交流電力を供給する複数相のインバータ3と、圧縮機モータ5の回転数に基づいて圧縮機モータ5の巻線を発熱させるホットスタンバイ制御と、V/f制御とを切り替えてインバータ3を制御するMPU7とを具備し、MPU7は、ホットスタンバイ制御を有効にする指令を取得した場合には、圧縮機モータ5の初期励磁後に、ホットスタンバイ制御を選定し、インバータ3の各相から圧縮機モータ5に対し、継続的に直流電流を供給するようにインバータ3を制御する。
(もっと読む)
同期電動機の制御装置及び制御方法
【課題】駆動する永久磁石同期電動機が任意のモータであっても、弱め界磁制御と最大トルク制御との切り換えを安定して行うことができる同期電動機の制御装置及び制御方法を提供する。
【解決手段】最大線間電圧演算部11によって演算された最大線間電圧VmaxとPMモータ1の電気角速度ωeとを用いて弱め界磁制御用のd軸電流演算値を演算するd軸電流演算部12と、最大線間電圧VmaxとPMモータ1の電気角速度ωeとに基づいて、弱め界磁制御用のd軸電流演算値と最大トルク制御用のd軸電流設定値とのいずれかをd軸電流指令値Id*として出力させる弱め界磁制御切換部13とを設ける。また、d軸電流演算部12によって、最大線間電圧Vmaxと、PMモータ1の電気角速度と、PMモータ1のモータパラメータである逆起電力係数及びd軸インダクタンスとからd軸電流演算値を演算する。
(もっと読む)
永久磁石同期電動機の制御装置
【課題】永久磁石同期電動機の電気的定数に設定誤差が存在しても最大トルク/電流制御を実現する。
【解決手段】実施形態によれば、比例制御器と積分制御器の出力の和に非干渉化のためのフィードフォワード項を加算するフィードフォワード制御手段と、積分制御器の出力を用いて回転子速度および回転子位置を推定する推定手段と、電動機に流れる電流を最小としながら最大のトルクを得る最大トルク/電流制御の制御式に電動機の電気的定数を適用して補正前D軸電流指令値を出力するD軸電流指令手段と、最大トルク/電流制御を実行する場合に補正前D軸電流指令値の設定ずれを補正可能なように決定された補正角ΔθCompとQ軸電流指令値IqRefを用いて、IdRef′=IdRefcosΔθComp−IqRefsinΔθCompにより補正前D軸電流指令値IdRefを補正してD軸電流指令値IdRef′を出力する電流位相補正手段とを備えた。
(もっと読む)
モータ制御装置
【課題】モータに矩形波電圧を印加するモータ制御装置において、過電流の発生を抑制する。
【解決手段】モータに印加する電圧の位相を変化させてトルクを調整するとともに、モータに印加する電圧波形を矩形波形とPWM波形の間で切り替えてモータを制御するモータ制御装置であって、モータの回転数に応じて電圧位相の下限値を規定する下限値曲線a,c,eを含むマップを備え、モータの回転数Nに応じた電圧位相φvが所定の下限値曲線a,c,e以下となった場合に、モータに印加する電圧波形を矩形波形からPWM波形に切り替える。
(もっと読む)
モータ制御装置
【課題】加速・減速や負荷トルク変動を含む広い動作領域で、磁束指令に対する磁束の追従遅れを補正し、所定のトルクを出力させ、加速性能および制御性能の向上が図れるモータ制御装置を得ること。
【解決手段】外部から入力される磁束指令Φcomと磁束推定部8が推定した推定磁束ΦSとの偏差が小さくなるようにする励磁電流指令を生成する磁束制御器13を備え、誘導モータ1をベクトル制御により駆動制御するモータ制御装置において、磁束指令Φcomに基づいて磁束遅れ補正指令Φhcomを生成する磁束遅れ補償器16aを設け、磁束遅れ補正指令Φhcomは、減算器20において磁束指令Φcomに代えて磁束推定部8が推定した推定磁束ΦSとの偏差を取るのに用いる。
(もっと読む)
回転機の制御装置
【課題】d軸電流フィードバック制御部32,q軸電流フィードバック制御部34とdn軸電流フィードバック制御部44,qn軸電流フィードバック制御部46とで干渉を生じ、ひいては制御が収束しないおそれがあること。
【解決手段】dn軸電流フィードバック制御部44,qn軸電流フィードバック制御部46では、実電流id,iqの高調波成分を高調波指令電流Σidkr,iqkrにフィードバック制御する。d軸電流指令値補正部24,q軸電流指令値補正部26では、基本波指令電流idr,iqrに高調波指令電流Σidkr,iqkrが加算される。d軸電流フィードバック制御部32,q軸電流フィードバック制御部34では、基本波指令電流idr,iqrおよび高調波指令電流Σidkr,iqkrの和と実電流id,iqとの差をゼロにフィードバック制御する。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
モータ駆動装置
【課題】負の界磁成分電流を最適な量だけ注入することができ、これによりモータをより高い速度で駆動できるモータ駆動装置を提供する。
【解決手段】モータ制御部は、推定ロータ速度ωmが設定値以上の場合に、その推定ロータ速度ωmの上昇に伴い増加し下降に伴い減少する負の界磁成分電流Idを加えて界磁成分電流の目標値Idrefを算出するとともに、その負の界磁成分電流Idの増減率を推定ロータ速度ωmの高さに応じて可変設定する。
(もっと読む)
電力変換装置の制御装置
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
モータ制御装置及びモータ駆動システム、並びにモータ制御方法
【課題】モータの制御を不安定にすることなく、モータを駆動するための電力に重畳する基本波成分を除去する、ことを目的とする。
【解決手段】モータ制御装置2は、3相/2相変換部12によって、電流センサ7によって検出された3相交流測定電流を2相交流測定電流へ変換し、2相測定交流電流に重畳する基本波成分を含む周波数帯域を阻止帯域とし、交流モータ4の回転数に基づいて該阻止帯域が変化するノッチフィルタを有する可変ノッチフィルタ部13によって、該阻止帯域の周波数成分を減衰させる。そして、モータ制御装置2は、電流PI制御部14、及び極座標/3相変換部15によって、交流モータ4を駆動させる3相交流電力指令値を、可変ノッチフィルタ部13から出力された2相交流測定電流と電流指令値に基づいて生成する。
(もっと読む)
モータ制御装置及びモータ駆動システム
【課題】少なくとも1つの制御モードがフィードフォワード制御とフィードバック制御とを併せ持っている場合でも、制御切替時におけるトルク変動を抑制することを目的とする。
【解決手段】フィードフォワード制御を行う非干渉制御部25を備える第1制御部11と、非干渉制御部25による調整量を用いる第2制御部12とを切り替えて採用する場合において、第2制御部12が採用されている場合に、第2制御部12によって設定された第2電圧指令値と非干渉制御部25による調整量とを用いて第1制御部11のPI制御器が備える積分器の初期値を設定する第1プリセット部20と、第1制御部11が採用されている場合に、第1制御部11によって設定された第1電圧指令値と非干渉制御部25による調整量とを用いて第2制御部12のPI制御器が備える積分器の初期値を設定する第2プリセット部30とを備えるモータ制御装置を提供する。
(もっと読む)
回転機の制御装置
【課題】スイッチング素子の温度が過度に上昇することに起因してスイッチング素子の信頼性が低下することを好適に回避することのできる回転機の制御装置を提供する。
【解決手段】スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、スイッチング素子温度Tthが高いほど、モータジェネレータの指令トルクTrq*を低下させる。そして、低下させた指令トルクTrq*を1次遅れフィルタに入力する。ここでは、スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、1次遅れフィルタの時定数Tsを小さく設定する。そして、1次遅れフィルタから出力される指令トルクTrqcに基づき、モータジェネレータの電流フィードバック制御を行う。
(もっと読む)
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
回転機の制御装置
【課題】電流センサ16にオフセット誤差が生じる場合、モデル予測制御の制御性が低下するおそれがあること。
【解決手段】電流再現部22は、電流センサ16の検出する母線電流IDC等をdq変換することで実電流id,iqを算出し、予測部33に出力する。UVW変換部40の出力する予測電流iue,ive,iweは、セレクタ42によって選択的に偏差算出部44に出力される。一方、母線電流IDCは、セレクタ46を介して、そのままの値か、乗算器48によって「−1」が乗算された値かのいずれかが偏差算出部44に出力される。偏差算出部44では、セレクタ46の出力に対するセレクタ42の出力の差を算出し、フィードバック制御部50に出力する。フィードバック制御部50では、偏差算出部44の出力値をゼロにフィードバック制御するための操作量を算出する。
(もっと読む)
21 - 40 / 515
[ Back to top ]