
Fターム[5H505JJ25]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | 補償回路、補正回路 (365)
Fターム[5H505JJ25]に分類される特許
1 - 20 / 365
モータ制御装置
交流モータの制御装置
線電流検出装置および電力変換システム
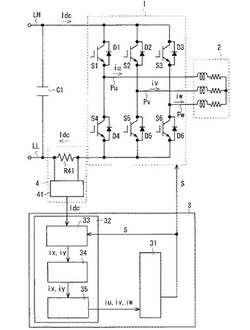
【課題】誤差を低減して線電流を得ることができる線電流検出装置を提供する。
【解決手段】二相線電流取得部33は、スイッチング素子S1〜S6のスイッチングパターンが変化するタイミングよりも前又は後の第1時点において検出された直流電流を、第1時点でのスイッチングパターンによって決定される第1相の線電流として推定し、当該タイミングに対して第1時点とは反対側であって前記第1時点との差が第1時間である第2時点において検出された直流電流を、第2時点でのスイッチングパターンによって決定される第2相の線電流として推定する。線電流補正部34は、第1相の線電流を補正して第3時点における第1相の線電流と、第3時点との差が第1時間よりも短い第2時間である第4の時点における第2相の線電流とを出力し、第1相の線電流のみを補正するときには第4時点として第2時点が採用される。
(もっと読む)
モータ制御装置、制御方法及びプログラム

【課題】磁気飽和を回避することにより、モータを安定的に制御する。
【解決手段】d軸電圧Vd或いはq軸電圧Vqの目標増加量が、所定の値以上となったときには、vdリミッタ制御部或いはvqリミッタ制御部によって、信号vd1、及び信号vd2の増加が制限される。これにより、信号vd1、及び信号vd2に示されるリラクタント電圧の増加量及びマグネット電圧の増加量が制限され、モータ90の出力が急峻に変化することがなくなる。
(もっと読む)
駆動装置
【課題】電動機を含む駆動系の共振の発生を抑制しつつ二次電池を適正使用する。
【解決手段】バッテリ電圧Vbがバッテリの適正な使用範囲における電圧上限値としての補償電圧Vrefを超えているときには、バッテリ電圧Vbが補償電圧Vref以下になるようフィードバック制御における補正量として目標補正量Taj*を計算し(S170)、計算した目標補正量Taj*を基本的には補正量Tajとしてモータトルク指令Tm*を設定する際に用い、目標補正量Taj*が減少したときには、モータを含む駆動系の共振周波数の周期とは異なる時間として予め定められた所定時間に亘って、目標補正量Taj*が減少する前の値を補正量Tajとして保持してモータトルク指令Tm*を設定する際に用いる(S220,S230)。これにより、モータを含む駆動系が共振するのを抑制することができると共にバッテリを適正使用することができる。
(もっと読む)
モータ制御装置
【課題】 少ないメモリ容量のトルク補正データで、負荷トルク変動および発生トルク変動を抑制するとともに、モータをより平滑に駆動し、モータを内蔵した圧縮機の振動および騒音を抑制することができるモータ制御装置を提供する。
【解決手段】 補正データ作成部21は、回転位置検出部19によって更新された回転位置情報に基づいて、補正用正弦波データテーブル20から、負荷トルク変動補正データとと発生トルク変動補正データとを読み出し、読み出した発生トルク変動補正データをトルク定数の周期変動成分kとする。そして、トルク定数の周期変動成分kから、発生トルク変動補正データicを求め、負荷トルク変動補正データiと発生トルク変動補正データicとを合算し、合算したトルク変動補正データをPWM作成部18に送る。
(もっと読む)
永久磁石同期電動機駆動システムのパラメータ推定装置
【課題】本発明は、永久磁石同期電動機駆動システムのパラメータ推定装置を提供する。
【解決手段】本発明の推定装置は、リアルタイム磁束推定を介してインダクタンスと永久磁石による鎖交磁束を推定して、永久磁石同期電動機の運転性能を向上する。
(もっと読む)
回転機の制御装置及び回転角算出装置
【課題】R/Dコンバータ36bによって算出される回転角に含まれる遅れ誤差がモータジェネレータの制御に及ぼす影響を抑制することのできる回転機の制御装置を提供する。
【解決手段】遅れ補正量設定部B14において、モータジェネレータの回転子の回転速度ωが高いほど、回転角の進角側への補正量である遅れ補正量Cδを大きく設定する処理を行う。そして、加算部B15において、設定された遅れ補正量Cδによって上記回転角を補正する処理を行う。さらに、誤差補正部B16によって、回転角に含まれる変動誤差を除去する処理を行う。これら処理は、R/Dコンバータ36b内にて行われる。
(もっと読む)
ブラシレスモータ制御方法及びブラシレスモータ制御装置並びに電動パワーステアリング装置
【課題】CPUに大きな演算負荷を掛けることなく、IPMモータのトルクリプルを低減可能なモータ制御方法・装置を提供する。
【解決手段】IPM型ブラシレスモータ3の制御装置50は、最大トルク制御による巻線電流値を示す基本波電流を算出する基本電流算出部52と、電流センサ64にて検出した相電流値に基づいて、マグネットトルクによるトルクリップルを相殺する第1高調波成分Bsin6(θ+β)と、リラクタンストルクによるトルクリップルを相殺する第2高調波成分Asin6(θ+α)とを算出する補正成分算出部59と、相電流と第1及び第2高調波成分のパラメータA,B,α,βとの関係が格納された補正マップ58と、第1及び第2高調波成分を基本波電流に重畳して供給電流を補正し電流指令値Id’,Iq’を作成する電流補正部60と、を有する。
(もっと読む)
車両
【課題】レゾルバを用いて検出された回転角に含まれる誤差を適切に補正する。
【解決手段】制御装置40は、レゾルバからの電気信号をレゾルバ−デジタル変換回路で変換して得られるレゾルバ検出角θorgを用いてモータの理想回転角θ0を設定し、理想回転角θ0とレゾルバ検出角θorgとの差分の波形を誤差学習値θeとして記憶する(43)。さらに、制御装置40は、実際のモータ回転速度Nmに対応する位相遅れ時間Tpを算出し(45)、位相遅れ時間Tp分だけレゾルバ検出角θorgを理想回転角θ0に沿って変位させた波形を用いて基準信号Kのずれ時間ΔTnmを算出し(46)、ずれ時間ΔTnmから真の回転角と理想回転角θ0とのオフセット量θofsを算出する(47)。制御装置40は、誤差学習値θeおよびオフセット量θofsを用いてレゾルバ検出角θorgを補正する(48)。
(もっと読む)
モータ制御装置、圧縮機およびヒートポンプ装置
【課題】実際の負荷トルクの変動態様に一層一致するようにトルク変動を補償する。
【解決手段】電流演算手段は、モータの巻線電流に基づいてd軸電流およびq軸電流を求める。速度制御手段は、回転速度が指令回転速度に一致するように指令d軸電流および指令q軸電流を生成する。電流制御手段は、d軸電流およびq軸電流が指令d軸電流および指令q軸電流に一致するように制御する。トルクデータ演算手段は、モータの回転角度に応じて記憶手段から基準負荷トルクデータを読み出し、その基準負荷トルクデータからゼロ点設定値を減算するとともにゲインを与えた負荷トルクデータを求める。変化傾向判断手段は、速度変動幅演算手段が求める回転速度の変動幅の変化傾向を判断する。ゲイン調整手段は、回転速度の変動幅が減少傾向であると判断されるようにゲインの値を調整する。補正手段は、負荷トルクデータをモータのトルク定数で除算した電流に基づいて指令q軸電流補正値を演算し、その指令q軸電流補正値により指令q軸電流を補正する。
(もっと読む)
電動機駆動用装置及び冷凍サイクル装置
【課題】直流平滑コンデンサに流れるリプル電流をより正確に導き出すことができ、適切な保護制御を行うことができる電動機駆動用装置等を提供する。
【解決手段】整流器5、直流リアクトル6、直流平滑コンデンサ7、及び逆変換器8から構成されるインバータ主回路と、直流母線電圧を検出する直流母線電圧検出手段11と、脈動電圧を検出する脈動電圧検出手段12と、インバータ主回路の出力電流を検出する出力電流検出手段13と、インバータ主回路の出力周波数を補正処理して出力する出力周波数補正手段16と、電源周波数を検出する電源周波数検出手段18と、インバータ出力電力を演算する出力電力演算手段17と、電源周波数、インバータ出力電力に基づいて脈動電圧からリプル電流を演算するリプル電流演算手段14と、逆変換器8に例えばPWM信号等の駆動信号を送るPWM信号演算部10とを備えるものである。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
初期補正機能を有するモーター駆動装置及び方法
【課題】本発明は、初期補正機能を有するモーター駆動装置及び方法に関する。
【解決手段】本発明の一実施形態によるモーター駆動装置は、モーターの駆動電流を提供するインバーターを介して当該モーターに流れる駆動電流に対応する電圧を検出する電流検出部と、当該電流検出部によって検出された検出電圧のピーク値を検出するピーク値検出部と、当該ピーク値検出部からの検出電圧をデジタル信号に変換するA/D変換部と、上記モーターの駆動開始時点から既設定された時間までの初期駆動区間に当該モーターを駆動させて上記A/D変換部からのデジタル信号に基づいて当該モーターの駆動電流のオフセットを補正する駆動制御部と、を含むことができる。
(もっと読む)
モータ制御装置
【課題】トルク応答性の遅れを抑制するモータ制御装置を提供する。
【解決手段】モータ10の回転速度を検出するモータ回転速度検出手段と、外部から入力されるトルク指令値及び前記回転速度に基づき、所定の上限電流値の範囲内である、第1の励磁電流指令値及びトルク電流指令値をそれぞれ演算する電流指令値演算手段と、前記第1の励磁電流指令値の位相を進めて第2の励磁電流指令値を演算することで、前記モータのロータ磁束の遅れを補償する補償手段と、前記上限電流値及び前記トルク電流指令値に基づいて、前記励磁電流指令値の上限値である上限励磁電流指令値を演算する上限励磁電流指令値演算手段と、前記第2の励磁電流指令値を、前記上限励磁電流指令値以下に制限することで、第3の励磁電流指令値を演算する励磁電流指令値制限手段と、前記第3の励磁電流指令値及び前記トルク電流指令値に基づいて前記モータを制御するモータ制御手段と、を備える。
(もっと読む)
永久磁石モータの制御装置
【課題】電力変換装置において、スイッチング損失の低減を図るとともにモータ損失の低減も図る。
【解決手段】直流電力から変換される交流磁束リプルとモータの磁極位置信号に基づいて、スイッチング素子のスイッチング動作を制御するために、駆動回路から駆動信号をスイッチング素子に供給し、上記スイッチング素子が、モータの磁極位置に対応付けられて導通あるいは遮断動作を行う。このような構成および作用により、上記スイッチング素子のスイッチング動作の単位時間当たりの回数あるいは交流電力の1サイクル当たりのスイッチング回数を、一般のPWM方式に比べ低減できる。また上記構成においては、パワースイッチング回路のスイッチング素子のスイッチング頻度を低減しているにもかかわらず、モータの損失を抑制でき、スイッチング動作に伴うインバータ損失も低減できる効果がある。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の検出値をフィードバック制御するための操作量としての指令電圧の1電気角周期に渡る積分値をゼロにフィードバック制御する場合、電気角の検出値に誤差が生じることで、電流の検出値に重畳されたオフセット誤差を適切に補正できないこと。
【解決手段】モデル予測制御部30では、モデル予測制御によってインバータINVの今回の操作状態を表現する電圧ベクトルViを選択する。積分値算出部40では、電圧ベクトルViを入力とし、各相の印加電圧の積分値Δvu,Δvv,Δvwを算出する。補正部44u,44v,44wでは、これらをゼロにフィードバック制御すべく実電流iu,iv,iwを補正する。
(もっと読む)
インバータ制御装置および電力変換装置
【課題】出力電圧一定制御とリンク共振抑制制御を互いの利点を損なうことなく同時に行い、それぞれの効果を得る。
【解決手段】直流電圧検出部(201)からの直流電圧値を電圧補正部(202)に補償器やフィルタを介さずに直接入力する。したがって、瞬時停電、瞬時電圧低下、瞬時電圧低下からの復帰時などの電圧急変時においても電圧補正部(202)はこれに応答して高速に補正処理を行うことができる。また、制限部(212)によりリンク共振補償量を一定の範囲に制限しているため、電圧急変時にリンク共振補償量が過度に変動してしまうことを防げる。また、制限部(212)により一定の範囲に制限されたリンク共振補償量を、制御演算部(204〜208)内の適切な制御帯域の補償器(206)に入力するため、必要以上に高速に応答させずにすみ、安定に制御できる。
(もっと読む)
回転機の制御装置
【課題】変調率が過度に大きくなる場合、制御量とその指令値との差を入力とする積分要素の出力値を参照するモデル予測制御によって、かえって制御性の低下を招くこと。
【解決手段】インバータの次回の操作状態を表現する電圧ベクトルV(n+1)は、ステップS20において、評価関数Jを最小とする電圧ベクトルに決定する。ここで、偏差edq(n+2)は、次回の操作状態として仮設定されたものによる予測電流ide(n+2),iqe(n+2)と指令電流idr,iqrとの差である。また、仮積分値Intは、前回までに採用された電圧ベクトルによって生じる偏差を入力とする積分要素の出力値(積分値In)に偏差edq(n+2)にゲインKiを乗算した値を加えたものである。ステップS28において変調率Mが閾値Mth以上であると判断される場合、積分値Inの更新を禁止する。
(もっと読む)
1 - 20 / 365
[ Back to top ]