
Fターム[5H505JJ26]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | 平滑回路(フィルター回路) (315)
Fターム[5H505JJ26]に分類される特許
1 - 20 / 315
電力変換装置
交流モータの制御装置
線電流検出装置および電力変換システム
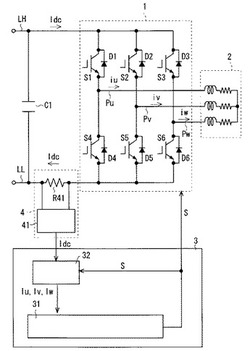
【課題】たとえスイッチングパターンが長期間に渡って維持されるとしても、線電流を得ることができる線電流検出装置を提供する。
【解決手段】スイッチング制御部31はスイッチング素子S1〜S6のスイッチングパターンを制御して相電圧を交流線Pu,Pv,Pwに印加させる。相電圧は交流の1周期において略1パルス波形を有する。電流検出部4は直流線LH,LLを流れる直流電流Idcを検出する。線電流取得部32はスイッチングパターンが変化する第1タイミングの前の第1時点において検出された直流電流Idcを第1時点でのスイッチングパターンによって決定される第1相の線電流として推定し、第1タイミングの後の第2時点において検出された直流電流Idcを第2時点でのスイッチングパターンによって決定される第2相の線電流として推定する。
(もっと読む)
モータ制御装置、制御方法及びプログラム

【課題】磁気飽和を回避することにより、モータを安定的に制御する。
【解決手段】d軸電圧Vd或いはq軸電圧Vqの目標増加量が、所定の値以上となったときには、vdリミッタ制御部或いはvqリミッタ制御部によって、信号vd1、及び信号vd2の増加が制限される。これにより、信号vd1、及び信号vd2に示されるリラクタント電圧の増加量及びマグネット電圧の増加量が制限され、モータ90の出力が急峻に変化することがなくなる。
(もっと読む)
線電流推定装置および電力変換システム
【課題】たとえスイッチングパターンが長期間に渡って維持されるとしても、その期間において線電流を得ることができる線電流推定装置を提供する。
【解決手段】線電流取得部32は、スイッチング素子S1〜S6のスイッチングパターンが変化する第1タイミングの前後において電流検出部4によって検出される直流電流を、スイッチパターンによって決定される第1相及び第2相の線電流として推定する。分解部34は第1相及び第2相の線電流をそれぞれ基本波成分と高調波成分とに分解する。基本波成分推定部35はこの基本波成分に基づいて、第2タイミングでの第1相及び第2相の線電流の基本波成分を推定する。高調波成分推定部36はこの高調波成分に基づいて、第2タイミングでの第1相及び第2相の線電流の高調波成分を推定する。合成部37は推定した基本波成分と推定した高調波成分とを加算して、第2タイミングでの第1相及び第2相の線電流を推定する。
(もっと読む)
モータ駆動装置
【課題】直流電源から電力供給を受けるモータ駆動装置において、1パルス制御の実行中に、直流電源に流れる電流に含まれるリップルを抑制することのできるモータ駆動装置を提供することを目的とする。
【解決手段】直流電源3から直流母線を介して入力される直流電力を三相交流電力に変換してIPMモータ8に出力するインバータ2と、電気角1周期の間に、各相に対応するスイッチング素子に対して正負1パルスの矩形波電圧をゲート駆動信号として印加する1パルス制御モードを有するインバータ制御装置10とを備え、インバータ制御装置10は、1パルス制御モードを実行する場合に、矩形波電圧の立ち上がり時および立ち下がり時において、所定の位相角幅でデューティを徐々に増加または減少させるモータ駆動装置1を提供する。
(もっと読む)
電力変換装置
【課題】エンジン発電機による電動機駆動システムにおいて、電力変換器の高調波や直流電圧変動の影響によって、d軸とq軸の電圧外乱による電流脈動の強めあい現象により軸振動が増加し、dq軸間干渉の影響により振動やd軸電流が増加する恐れがある。
【解決手段】エンジン発電機システムの電力変換器105において、発電機104の回転子磁束方向のd軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにd軸電圧調整手段117により発電機104を制御するためのd軸電圧Vd*をΔVd*調整し、さらに、q軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにq軸電圧調整手段118によりq軸の電圧Vq*をΔVq*調整する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
同期機制御装置
【課題】同期機や電力変換手段等の状態に応じて、適切な運転目標指令を生成し、運転目標を満足する制御指令を生成する。
【解決手段】トルク指令と回転速度と運転目標指令とに基づいて、電機子鎖交磁束指令とトルク電流指令を生成する制御指令生成器10を、トルク指令またはトルク電流指令に基づき第1の磁束指令を生成する第1の磁束指令生成器21と、トルク指令またはトルク電流指令と同期機1の回転速度とに基づき第2の磁束指令を生成する第2の磁束指令生成器22と、運転目標指令に基づき第1および第2の磁束指令の2つの磁束指令の配分比に相当する配分係数を設定する指令配分設定器23と、2つの磁束指令と配分係数に基づき電機子鎖交磁束指令を出力する磁束指令調整器24と、トルク指令と電機子鎖交磁束指令とに基づきトルク電流指令を生成するトルク電流指令生成器25により構成する。
(もっと読む)
回生型高圧インバータ
【課題】本発明は、従来の直列型H−ブリッジ高圧インバータに回生運転が可能な能動整流部を有する回生型単位電力セルを混合して、部分的な回生運転ができるようにする部分回生型高圧インバータを提供する。
【解決手段】本発明によるインバータは、直列型H−ブリッジ高圧インバータの単位電力セルの入力端構造を変更して回生運転が可能にし、制動抵抗(dynamic braking resistor)を要しないため、DCリンクキャパシタのサイズを従来の高圧インバータより減らすことができる。
(もっと読む)
油圧ユニット
【課題】油圧ユニットに誘導モータを用いた場合であっても、油圧ユニットの運転効率及び運転応答性の両方が低下しないようにする。
【解決手段】油圧ユニット(10)に、誘導モータ(12)の回転速度に応じて効率優先動作と応答優先動作とを切り換えながら誘導モータ(12)をインバータ(13)を介してベクトル制御で制御可能な制御部(1)を設ける。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
モータ制御装置
【課題】加速・減速や負荷トルク変動を含む広い動作領域で、磁束指令に対する磁束の追従遅れを補正し、所定のトルクを出力させ、加速性能および制御性能の向上が図れるモータ制御装置を得ること。
【解決手段】外部から入力される磁束指令Φcomと磁束推定部8が推定した推定磁束ΦSとの偏差が小さくなるようにする励磁電流指令を生成する磁束制御器13を備え、誘導モータ1をベクトル制御により駆動制御するモータ制御装置において、磁束指令Φcomに基づいて磁束遅れ補正指令Φhcomを生成する磁束遅れ補償器16aを設け、磁束遅れ補正指令Φhcomは、減算器20において磁束指令Φcomに代えて磁束推定部8が推定した推定磁束ΦSとの偏差を取るのに用いる。
(もっと読む)
回転機の制御装置
【課題】d軸電流フィードバック制御部32,q軸電流フィードバック制御部34とdn軸電流フィードバック制御部44,qn軸電流フィードバック制御部46とで干渉を生じ、ひいては制御が収束しないおそれがあること。
【解決手段】dn軸電流フィードバック制御部44,qn軸電流フィードバック制御部46では、実電流id,iqの高調波成分を高調波指令電流Σidkr,iqkrにフィードバック制御する。d軸電流指令値補正部24,q軸電流指令値補正部26では、基本波指令電流idr,iqrに高調波指令電流Σidkr,iqkrが加算される。d軸電流フィードバック制御部32,q軸電流フィードバック制御部34では、基本波指令電流idr,iqrおよび高調波指令電流Σidkr,iqkrの和と実電流id,iqとの差をゼロにフィードバック制御する。
(もっと読む)
モータ制御装置
【課題】トルク応答性の遅れを抑制するモータ制御装置を提供する。
【解決手段】モータ10の回転速度を検出するモータ回転速度検出手段と、外部から入力されるトルク指令値及び前記回転速度に基づき、所定の上限電流値の範囲内である、第1の励磁電流指令値及びトルク電流指令値をそれぞれ演算する電流指令値演算手段と、前記第1の励磁電流指令値の位相を進めて第2の励磁電流指令値を演算することで、前記モータのロータ磁束の遅れを補償する補償手段と、前記上限電流値及び前記トルク電流指令値に基づいて、前記励磁電流指令値の上限値である上限励磁電流指令値を演算する上限励磁電流指令値演算手段と、前記第2の励磁電流指令値を、前記上限励磁電流指令値以下に制限することで、第3の励磁電流指令値を演算する励磁電流指令値制限手段と、前記第3の励磁電流指令値及び前記トルク電流指令値に基づいて前記モータを制御するモータ制御手段と、を備える。
(もっと読む)
モータ制御装置及びモータ駆動システム、並びにモータ制御方法
【課題】モータの制御を不安定にすることなく、モータを駆動するための電力に重畳する基本波成分を除去する、ことを目的とする。
【解決手段】モータ制御装置2は、3相/2相変換部12によって、電流センサ7によって検出された3相交流測定電流を2相交流測定電流へ変換し、2相測定交流電流に重畳する基本波成分を含む周波数帯域を阻止帯域とし、交流モータ4の回転数に基づいて該阻止帯域が変化するノッチフィルタを有する可変ノッチフィルタ部13によって、該阻止帯域の周波数成分を減衰させる。そして、モータ制御装置2は、電流PI制御部14、及び極座標/3相変換部15によって、交流モータ4を駆動させる3相交流電力指令値を、可変ノッチフィルタ部13から出力された2相交流測定電流と電流指令値に基づいて生成する。
(もっと読む)
交流電動機の制御装置
【課題】過渡電圧飽和に起因して生じ得る電動機の不安定現象を抑制すること。
【解決手段】交流電動機の制御装置は、速度指令を生成する位置制御器と、電流指令を生成する速度制御器と、電圧指令を生成する電流制御器と、q軸電圧方程式の過渡電圧成分に相当するq軸電圧飽和量ΔVqを算出するdi/dtリミッタ部と、q軸電圧飽和量ΔVqを用いて位置指令修正量ΔPを生成する飽和量F/B部105と、を備える。また、この飽和量F/B部105は、q軸電圧飽和量ΔVqを通過させ、その出力の換算値を位置指令修正量ΔPとして位置制御器の入力側にフィードバックするLPF121と、電動機の電気回路時定数の逆数相当値をLPF121の帯域を決定するフィルタ定数ωとしてLPF121に設定する帯域設定器122と、を備える。
(もっと読む)
回転機の制御装置
【課題】スイッチング素子の温度が過度に上昇することに起因してスイッチング素子の信頼性が低下することを好適に回避することのできる回転機の制御装置を提供する。
【解決手段】スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、スイッチング素子温度Tthが高いほど、モータジェネレータの指令トルクTrq*を低下させる。そして、低下させた指令トルクTrq*を1次遅れフィルタに入力する。ここでは、スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、1次遅れフィルタの時定数Tsを小さく設定する。そして、1次遅れフィルタから出力される指令トルクTrqcに基づき、モータジェネレータの電流フィードバック制御を行う。
(もっと読む)
駆動信号生成回路
【課題】処理負荷を抑制しつつモータの回転を安定化させることができる駆動信号生成回路を提供する
【解決手段】駆動信号生成回路は、電流検出部と、d軸電流及びq軸電流を算出する算出部と、三相モータの回転速度を示す速度信号と、三相モータの目標回転速度を示す目標信号とに基づいて、q軸電流の第1基準値を示す基準信号出力部と、d軸電流の電流値及び第2基準値の誤差に応じた第1制御信号出力部と、q軸電流の電流値及び第1基準値の誤差に応じた第2制御信号出力部と、三相モータを駆動する駆動回路に対し、第1及び第2制御信号に基づいて、d軸電流が第2基準値となり、q軸電流の電流値が第1基準値となるような駆動信号を出力する駆動信号出力部と、三相モータの回転速度が所定の回転速度となった後に、第2制御信号に基づいて、第2制御信号のリップルが小さくなるよう検出出力を調整する調整部と、を備える。
(もっと読む)
1 - 20 / 315
[ Back to top ]