
Fターム[5H505LL34]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 磁気的変量の検出(磁束、磁界) (132) | 磁束、電界 (103) | 演算による間接検出 (54)
Fターム[5H505LL34]に分類される特許
1 - 20 / 54
線電流検出装置および電力変換システム
【課題】誤差を低減して線電流を得ることができる線電流検出装置を提供する。
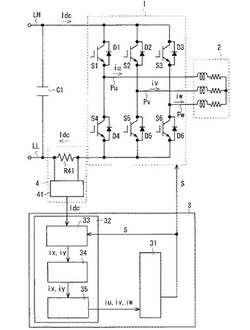
【解決手段】二相線電流取得部33は、スイッチング素子S1〜S6のスイッチングパターンが変化するタイミングよりも前又は後の第1時点において検出された直流電流を、第1時点でのスイッチングパターンによって決定される第1相の線電流として推定し、当該タイミングに対して第1時点とは反対側であって前記第1時点との差が第1時間である第2時点において検出された直流電流を、第2時点でのスイッチングパターンによって決定される第2相の線電流として推定する。線電流補正部34は、第1相の線電流を補正して第3時点における第1相の線電流と、第3時点との差が第1時間よりも短い第2時間である第4の時点における第2相の線電流とを出力し、第1相の線電流のみを補正するときには第4時点として第2時点が採用される。
(もっと読む)
線電流検出装置および電力変換システム

【課題】たとえスイッチングパターンが長期間に渡って維持されるとしても、線電流を得ることができる線電流検出装置を提供する。
【解決手段】スイッチング制御部31はスイッチング素子S1〜S6のスイッチングパターンを制御して相電圧を交流線Pu,Pv,Pwに印加させる。相電圧は交流の1周期において略1パルス波形を有する。電流検出部4は直流線LH,LLを流れる直流電流Idcを検出する。線電流取得部32はスイッチングパターンが変化する第1タイミングの前の第1時点において検出された直流電流Idcを第1時点でのスイッチングパターンによって決定される第1相の線電流として推定し、第1タイミングの後の第2時点において検出された直流電流Idcを第2時点でのスイッチングパターンによって決定される第2相の線電流として推定する。
(もっと読む)
車両駆動用誘導電動機の制御装置
【課題】トルク推定の精度を向上させることができる、車両駆動用誘導電動機の制御装置。
【解決手段】上位コントローラ110から入力されるトルク指令Tmrefおよび二次磁束指令φ2refに基づいて、車両駆動用誘導電動機108を高周波駆動するインバータ107に制御信号を出力するモータコントローラ109は、インバータ107の駆動周波数ω1を設定する一次周波数演算部219と、誘導電動機108の三相電流値を検出するモータ電流値検出部209と、検出された三相電流値をd軸電流値Idおよびq軸電流値Iqに変換する座標変換部223と、誘導電動機108の出力トルクを推定するトルク推定部211と、を備え、トルク推定部211は、モータ電流値検出部209による電流検出からトルク推定までの電流位相変化を補正する位相補償量と、d軸電流値およびq軸電流値とに基づいて、出力トルクTmを推定する。
(もっと読む)
永久磁石同期電動機駆動システムのパラメータ推定装置
【課題】本発明は、永久磁石同期電動機駆動システムのパラメータ推定装置を提供する。
【解決手段】本発明の推定装置は、リアルタイム磁束推定を介してインダクタンスと永久磁石による鎖交磁束を推定して、永久磁石同期電動機の運転性能を向上する。
(もっと読む)
同期機制御装置
【課題】同期機や電力変換手段等の状態に応じて、適切な運転目標指令を生成し、運転目標を満足する制御指令を生成する。
【解決手段】トルク指令と回転速度と運転目標指令とに基づいて、電機子鎖交磁束指令とトルク電流指令を生成する制御指令生成器10を、トルク指令またはトルク電流指令に基づき第1の磁束指令を生成する第1の磁束指令生成器21と、トルク指令またはトルク電流指令と同期機1の回転速度とに基づき第2の磁束指令を生成する第2の磁束指令生成器22と、運転目標指令に基づき第1および第2の磁束指令の2つの磁束指令の配分比に相当する配分係数を設定する指令配分設定器23と、2つの磁束指令と配分係数に基づき電機子鎖交磁束指令を出力する磁束指令調整器24と、トルク指令と電機子鎖交磁束指令とに基づきトルク電流指令を生成するトルク電流指令生成器25により構成する。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御を用いる場合、スイッチングモードの更新可能タイミングの都度、スイッチングモードを最適なものに変更することが可能であることから、スイッチングモードの切り替え頻度が高くなるおそれがあること。
【解決手段】予測部33では、モード設定部31によって仮設定されたスイッチングモードのそれぞれに応じて、モータジェネレータ10を流れる電流と指令電流id*,iq*との差ベクトルのノルムが閾値rとなるまでの所要時間Tsを予測する。モード決定部34では、所要時間Tsが最も長いものを最終的なスイッチングモードに決定する。操作部28では、インバータINVのスイッチングモードをモード決定部34の決定に従わせる。
(もっと読む)
回転機の制御装置
【課題】変調率が過度に大きくなる場合、制御量とその指令値との差を入力とする積分要素の出力値を参照するモデル予測制御によって、かえって制御性の低下を招くこと。
【解決手段】インバータの次回の操作状態を表現する電圧ベクトルV(n+1)は、ステップS20において、評価関数Jを最小とする電圧ベクトルに決定する。ここで、偏差edq(n+2)は、次回の操作状態として仮設定されたものによる予測電流ide(n+2),iqe(n+2)と指令電流idr,iqrとの差である。また、仮積分値Intは、前回までに採用された電圧ベクトルによって生じる偏差を入力とする積分要素の出力値(積分値In)に偏差edq(n+2)にゲインKiを乗算した値を加えたものである。ステップS28において変調率Mが閾値Mth以上であると判断される場合、積分値Inの更新を禁止する。
(もっと読む)
誘導電動機の速度制御装置
【課題】本発明は、連続工程ラインにおいて張力及び位置センサーを用いないオープン−ループ速度制御を行って、ベクトルインバータの機能を向上するための誘導電動機の速度制御装置を提供する。
【解決手段】本発明の装置は、張力指令、摩擦損補償を利用して、速度制御部の出力に対するトルク制限を計算し、これを利用して誘導電動機の速度を制限して、連続工程ラインで張力センサー及び位置センサーを用いることなく、ベクトル制御方式のインバータの性能を向上することができる。
(もっと読む)
回転機の制御装置およびその製造方法
【課題】電動機10の相電流を基本波とすべくインバータINVの出力電圧をフィードフォワード補正したのでは、電動機10のステータの巻線を鎖交する磁束が基本波からずれる場合には、トルク脈動を低減できないこと。
【解決手段】相殺電磁力出力部44は、鎖交磁束の基本波からのずれに起因した電磁力の歪を相殺する相殺電磁力についての、接線方向の相殺電磁力Fnθと、法線方向の相殺電磁力FnRと、軸線方向の相殺電磁力FnTとを各別に出力する。歪補正部36,38,40のそれぞれでは、これら相殺電磁力に応じた電圧を、制御量の制御のための操作量(指令電圧vur,vvr,vwr)に重畳する。
(もっと読む)
変換器の制御方法
【課題】高速度の制御応答、特に高速度のトルク応答と低い高調波歪みを変換器に与えること。
【解決手段】電気システム10の変換器12は、ある第1の最適化目標に関して決定されている変換器12の切換えシーケンスが第2のステップで変更されるように制御され、第2のステップでは切換えシーケンスはさらに切換えシーケンスの第1の最適化が基づいている仮定の結果である可能性がある磁束誤差を補正することにより最適化される。
(もっと読む)
誘導電動機用磁束制御装置、誘導電動機の磁束制御装置
【課題】磁束制御装置において低速でも磁束推定性能の信頼性を維持すること。
【解決手段】本発明は、速度制御装置404、トルク分電圧指令(V*q)に出力するトルク電流制御装置406、磁束分電流指令(i*d)を出力する磁束制御装置408、磁束分電流指令(i*d)の入力を受けて、磁束分電圧指令(V*d)に出力する磁束電流制御装置410、前記トルク分電圧指令(V*q)及び磁束分電圧指令(V*d)を、誘導電動機に印加される三相の電圧指令に変換して出力する三相変換器411、誘導電動機の回転子の回転角(θe)、前記回転子の推定磁束値(λdr)及び回転子の推定速度(Wm)を出力する磁束推定機415及び前記トルク分電圧指令(V*q)及び前記推定速度(Wm)の入力を受けて、前記磁束指令(λ*m)の大きさを調整するゲイン値を出力する磁束調整装置416を含む。
(もっと読む)
電動機駆動装置
【課題】簡単な構成で確実に可変速運転範囲内の減速時間を短縮する。
【解決手段】2乗トルク特性の機械を駆動する交流電動機2と、これに交流を給電する変換器1と、変換器1のスイッチング素子のゲートにオンオフパルスを供給する制御手段3とで構成する。制御手段3は、速度指令が第1の運転速度から第2の運転速度への減速指令であるとき、所定の減速レートを有する新たな速度指令に変換する速度基準レート手段4と、減速レートを求める減速率演算手段5と、交流電動機2の速度が新たな速度指令に追従するように制御してオンオフパルスを出力する主制御手段6を備える。減速率演算手段5は、交流電動機2をフリーラン減速させたときの減速曲線が、第2の運転速度と交差する点における接線の傾きが前記減速レートとなるように演算する。
(もっと読む)
電動機の駆動装置
【課題】モータの巻線抵抗やリアクタンスなどのモータ定数を使用せずにモータを駆動することができる電動機の駆動装置を提供する。
【解決手段】本発明の駆動装置は、インバータ10の三相出力電流をトルク電流および磁化電流に変換し、該トルク電流および磁化電流を制御するベクトル制御部11を備える。ベクトル制御部11は、トルク電流指令値とトルク電流との偏差に基づいてトルク電圧指令値を決定するトルク電圧制御部21と、磁化電流指令値と磁化電流との偏差に基づいて磁化電圧指令値を決定する磁化電圧制御部22と、インバータ10の出力電圧と目標出力電圧との偏差に基づいて磁化電流指令値を決定する目標磁化電流決定部26と、目標出力電圧を決定する目標出力電圧決定部27とを備える。目標出力電圧決定部27は、目標出力電圧と角速度との関係を示すV/ωパターンを記憶しており、該V/ωパターンに従って角速度から目標出力電圧を決定する。
(もっと読む)
電動機駆動装置
【課題】1台の多巻線電動機をベクトル制御により可変速駆動するのに好適なそれぞれの電動機駆動装置を提供する。
【解決手段】複数の一次巻線にて形成される多巻線電動機2に対して、第1電動機駆動装置、第2電動機駆動装置・・第N電動機駆動装置などからなり、この第1電動機駆動装置はインバータ回路と、電流検出器と、ベクトル制御回路とから構成し、同様に、第2電動機駆動装置はインバータ回路と、電流検出器と、ベクトル制御回路23aとから構成し、このベクトル制御回路23aには従来のベクトル制御回路と同一の構成要素の他に、加算演算器77、3相/2相変換器86、誘起電圧磁束演算器での演算機能の1部を省略した磁束演算器87a、磁束調節器89それぞれが追加機能として装備することにより、多巻線電動機2が発生する二次磁束をより安定させ、多巻線電動機2の回転数が変動したり、一次電流が脈動する現象を抑制することが出来る。
(もっと読む)
モータ駆動制御装置
【課題】鎖交磁束の波形に含まれる高調波成分の影響を除去してトルクリプルを抑制できるモータ駆動制御装置を提供する。
【解決手段】モータ駆動制御装置において、回転子の角度検出値に基づいて変化するd軸交流信号をコイルに流すd軸電流の目標値であるd軸電流目標値に加算し、前記角度検出値に基づいて変化しd軸交流信号に対して1/4周期の位相差をもつq軸交流信号をコイルに流すq軸電流の目標値であるq軸電流目標値に加算する加算手段を有する。そして、d軸交流信号が加算されたd軸電流目標値に追従するようにd軸電流を制御し、q軸交流信号が加算されたq軸電流目標値に追従するようにq軸電流を制御する。
(もっと読む)
制御装置
【課題】矩形波制御に基づく制御の実行時に処理負荷を適切に低減することが可能な制御装置を実現する。
【解決手段】制御モード決定部20と、電圧指令値決定部33,43と、制御信号生成部23と、制御モード決定部20により決定された制御モードがパルス幅変調制御モードである場合に、制御信号生成部23の演算周期を、キャリア周期の1/2に設定された基準演算周期のN倍(Nは1以上の整数)の第一周期に設定するとともに、電圧指令値決定部43の演算周期を、第一周期のM倍(Mは2以上の整数)の第二周期に設定する演算周期設定部21と、を備え、演算周期設定部21は、制御モード決定部20により決定された制御モードが矩形波制御モードである場合に、電圧指令値決定部33の演算周期及び制御信号生成部23の演算周期の双方を、第二周期に設定する。
(もっと読む)
交流回転機の制御装置
【課題】位置制御応答を高く保つことが出来るとともに、低速域から高速域までスムーズに交流回転機を駆動する交流回転機の制御装置を得る。
【解決手段】電圧指令に基づいて交流回転機1に電圧を印加する電圧印加手段3と、交流回転機1に流れる検出電流ベクトルを検出する電流検出手段2と、検出電流ベクトルから交流回転機1のインダクタンスに依存する信号を抽出して交流回転機1の回転子の検出位置を演算する位置検出手段4と、電圧指令と検出電流ベクトルと検出位置とに基づいて交流回転機1の回転子の推定位置および交流回転機1の推定速度を演算する推定手段5と、検出位置と外部から与えられる位置指令との偏差に基づいて速度指令を演算し、速度指令と推定速度との偏差に基づいて電圧指令ベクトルを生成するとともに、電圧指令ベクトルを推定位置に基づいて電圧指令に変換する制御手段6とを備える。
(もっと読む)
同期電動機の制御装置
【課題】同期PWM方式により同期電動機を駆動する場合であっても、位相遅れを補償し、電動機効率およびトルク低下を防止することができる同期電動機の制御装置を得る。
【解決手段】トルク指令、同期電動機2の固定子に流れる電流および回転子の位相に基づいて、同期電動機2に対する交流電圧指令を算出する電圧指令演算手段15と、交流電圧指令に基づいて、非同期PWM方式または同期PWM方式で同期電動機2を駆動する交流電圧を生成するPWMインバータ20と、同期電動機2の運転状態に基づいて、非同期PWM方式と同期PWM方式とを切り替える切替手段17と、非同期PWM方式および同期PWM方式で同期電動機2を駆動する場合の各々において、演算遅れおよびPWM応答遅れによる回転子の位相遅れを補償する位相補償手段18とを備え、電圧指令演算手段15は、位相補償手段18で位相補償された回転子の位相を用いて交流電圧指令を算出する。
(もっと読む)
誘導電動機の制御装置及び制御方法
【課題】軽負荷状態でも最大トルク動作点からずれてしまわずに損失が増えてしまわない誘導電動機の制御装置又は制御方法を提供する。
【解決手段】誘導電動機の制御装置10は、ベクトル制御される誘導電動機106の制御装置10において、誘導電動機106の検出速度ωm又は推定速度ωm^と速度指令値ωm*とからトルク指令値Tm*を生成するトルク指令値生成部11と、トルク指令値生成部11からのトルク指令値Tm*を入力して定格トルクTmnと定格電流Inとに基づいて最大トルク動作点で駆動させるための磁束指令値φd*を生成する磁束指令値生成部12を備えた。
(もっと読む)
交流電動機の駆動装置及び電動機車両
【課題】交流電動機の極低速域のセンサレス駆動を、高調波電圧を意図的に印加することなく、理想的なPWM波形にて、ベクトル制御を行う交流電動機の駆動装置を提供する。
【解決手段】交流電動機の電流検出と、電流変化率の検出を行い、この電流変化を与えているインバータの出力電圧を考慮して、交流電動機内部の磁束位置の推定演算を行う。電流変化率は、インバータのパルス波形によって発生するため、意図的な高調波の印加を行うことなく、交流電動機の磁束位置を推定演算できる。
(もっと読む)
1 - 20 / 54
[ Back to top ]