
Fターム[5H505LL38]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | トルク(演算してトルクを求めるもの) (288)
Fターム[5H505LL38]に分類される特許
1 - 20 / 288
電気自動車用モータ制御方法
モータ制御装置
モータ制御装置
モータ制御装置及び車両の電動パワーステアリング装置
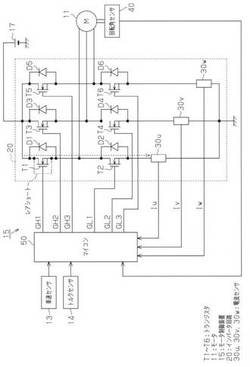
【課題】インバータ回路のトランジスタに発生する異常をより確実に検出することのできるモータ制御装置を提供する。
【解決手段】このモータ制御装置15は、インバータ回路20に設けられた対をなすトランジスタT1〜T6のスイッチングを制御することでモータ11に三相の交流電流を供給する。また、モータ11に供給される各相電流値を電流センサ30u,30v,30wを通じて検出し、検出される各相電流値に基づいてトランジスタT1〜T6に貫通電流が発生していると判断されるとき、インバータ回路20の駆動を停止させる。ここでは、各相電流値に対して第1の閾値を設定するとともに、各相電流値の総和に対して第2の閾値を設定する。そして、各相電流値の絶対値の少なくとも一つが第1の閾値以上であって且つ、各相電流値の総和の絶対値が第2の閾値以上であるとき、トランジスタT1〜T6に貫通電流が発生していると判断する。
(もっと読む)
モータを制御するための方法およびシステム

【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
電動機の駆動方法および駆動装置
【課題】電動機の損失を最小化することができる電動機の駆動方法および駆動装置を提供する。
【解決手段】第1時刻から所定時間経過した第2時刻において目標回転速度ω*となるように電動機を駆動させる電動機の駆動方法であって、目標回転速度ω*を設定する目標設定ステップ(S1)と、電動機の入出力特性から得られたマップにおいて、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道L1を決定する初期軌道決定ステップ(S2、S3)と、初期軌道L1を構成する全動作点における損失の和が最小(または効率の和が最大)となるように、マップに基づいて最適化を行って目標軌道L2を導出する目標軌道導出ステップ(S4〜S7)と、目標軌道L2に従ってトルクおよび回転速度を制御する制御ステップと、を含むことを特徴とする。
(もっと読む)
モータ制御装置およびトルク値取得方法
【課題】モータ制御装置において、必要メモリ容量の増大を抑制しつつ、より精度よくモータのトルク値を求められるようにする。
【解決手段】記憶部131は、トルク指令値を電流指令値に変換するための電流指令テーブルを記憶する。そして、トルク値取得部160は、当該電流指令テーブルを参照して、モータ電流値をトルク値に変換することで、モータのトルク値を取得する。トルク値取得部160は、モータ制御のために用意される電流指令テーブルを参照するので、トルク値取得のためのテーブルを別途設ける必要がない。従って、記憶部131のメモリ容量を増やす必要がない。また、トルク値取得部160は、モータMの特性を詳細に示す電流指令テーブルを参照してトルク値を求めるので、数式に基づいてトルク値を求める場合との比較において、より短い時間で、より高精度なトルク値を取得できる。
(もっと読む)
ブラシレスモータ制御方法及びブラシレスモータ制御装置並びにブラシレスモータ並びに電動パワーステアリング装置
【課題】d軸方向とq軸方向のインダクタンスに差があるモータにおいて、高負荷側のトルクだれを防止し、モータのトルク向上や小型化を図る。
【解決手段】ブラシレスモータ3は、多角形状の断面を有するロータコアと、ロータコアの外周の各辺部分に取り付けられたセグメントマグネットとを備えるロータコアを有し、d軸方向のインダクタンスとq軸方向のインダクタンスが異なる。ブラシレスモータ3の制御装置50は、電流センサ61と、負荷状態に応じて巻線電流値を算出する電流指令部51とを有する。電流指令部51は、電流センサ61にて検出した相電流値に基づいて、電機子反作用の影響によって理論トルクに対して出力トルクが減少する高負荷領域にて進角制御を行い、電機子巻線に対する供給電流にd軸電流Id’を付加する供給電流量算出部52と、相電流と進角値との関係が示された進角制御マップ63を有する。
(もっと読む)
電力変換装置
【課題】電力変換装置において、直流リンク電圧の脈動に起因して生ずるモータの振動や騒音を抑制する。
【解決手段】脈動成分を有する直流リンク電圧(vdc)を交流に変換して永久磁石同期電動機(7)に出力するインバータ回路(4)を設ける。ベクトル制御によってインバータ回路(4)を制御し、基本電圧ベクトルがゼロベクトル(モータ端子電圧がゼロとなる電圧ベクトル)を含まない制御状態においては、脈動に応じて永久磁石同期電動機(7)のd軸電圧ベクトルとq軸電圧ベクトルの2つの電圧ベクトルの合成電圧ベクトル(V0)のq軸から見た位相を脈動させる制御部(5)を設ける。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
油圧ユニット
【課題】油圧ユニットに誘導モータを用いた場合であっても、油圧ユニットの運転効率及び運転応答性の両方が低下しないようにする。
【解決手段】油圧ユニット(10)に、誘導モータ(12)の回転速度に応じて効率優先動作と応答優先動作とを切り換えながら誘導モータ(12)をインバータ(13)を介してベクトル制御で制御する制御部(1)を設ける。
(もっと読む)
電動機の制御装置、制御システム及び制御方法
【課題】電動機のトルクを、安定して高い精度で制御できる、電動機の制御装置、制御システム及び制御方法を提供する。
【解決手段】永久磁石同期電動機の回転軸に、半導体歪みセンサの出力を無線送信する無線送信装置を取り付ける一方、電動機本体に無線送信装置からの送信を受信する無線受信装置を設ける。電動機を駆動制御する制御装置は、無線送受信装置を介して歪みセンサの出力を入力し、電動機のトルクを検出し、トルク検出値とトルク指令値との偏差に基づき、電動機のPWM制御信号を演算して出力する。これにより、電動機における電流とトルクとの相関が、永久磁石の温度変化や劣化によって変動しても、電動機のトルクを高精度に制御できる。
(もっと読む)
車両操舵装置の制御装置
【課題】消費電力を低減することができる車両操舵装置の制御装置を提供する。
【解決手段】車両操舵装置1は、互いに異なる巻数の界磁部を用いてステアリングシャフト35にトルクを付与する電動モータ51と、ステアリングホイール12の操作にともないステアリングシャフト35に入力されるトルクである操舵トルクに応じて電動モータ51のトルクを制御する制御装置67とを備えている。制御装置67は、操舵トルクに応じて、電動モータの各界磁部の少なくとも一方に供給するモータ電流を制御する。
(もっと読む)
電動機の制御データ更新方法と制御装置
【課題】電動機の個体差に応じてマップのデータを最適化できるようにする。
【解決手段】トルクと駆動電流及び電流位相角との関係を示すマップを参照して、目標トルクが出力されるように同期電動機の駆動装置を制御しつつ(S1)、当該同期電動機の出力軸に取り付けたトルク測定器で実トルクを測定する(S2)。この実トルクの測定結果に基づいて、目標トルクが出力されているか否か判断し(S3)、目標トルクが出力されていない場合に、現在の駆動電流の電流位相角を変更してトルク測定器で実トルクを測定することにより、当該測定トルクが最適値になる電流位相角を決定し(S4〜S6)、この決定した電流位相角に基づいてマップを更新する(S7)、電動機の制御データ更新方法を提案する。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁制御によって軽快な操舵フィーリングを保持しつつ、弱め界磁制御が有効ではなくなって無駄な発熱が発生する事象を、モータの駆動状況に応じて回避する電動パワーステアリング装置を提供する。
【解決手段】モータの駆動状況に対応するトルク電流であるq軸電流IqがIq=Iq´に設定されたとき、モータ回転数が増加しないで発熱のみが増加するドットを付けた領域135内に電流ベクトルiを設定しないで、ハッチングで示す使用領域134内で、弱め界磁電流であるd軸電流Idが使用領域134の上限値Idlimとなる電流ベクトルkに設定する。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】回生制御の実行時においてもモータの各相電流値を検出することができるモータ制御装置を提供すること。
【解決手段】マイコンは、三角波δが山となるタイミングTbで上段側の各FETを全てオンにするような制御信号を出力する第1周期C1、及び下段側の各FETを全てオンにするような制御信号を出力する第2周期C2を交互に繰り返すことにより、その回生制御を実行する。そして、この回生制御の実行時、マイコンは、第1周期C1において三角波δが山となるタイミングTbで取得された各電流センサの出力値をオフセット電流値Ix0として、第2周期C2において第1周期C1と同じタイミングTbで取得された補正前電流値Ix1を補正することにより、モータの各相電流値を検出する。
(もっと読む)
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
交流電動機の速度制御装置
【課題】磁束軸電流の過補償を抑制する。
【解決手段】交流電動機の速度制御装置は、トルク軸電流を比例積分制御するトルク軸電流制御器から出力されるトルク軸電圧成分を所定の値以下になるように制限するトルク軸電圧リミッタと、前記トルク軸電流制御器から出力されるトルク軸電圧成分と前記トルク軸電圧リミッタから出力されるトルク軸電圧指令とからトルク軸電圧飽和量を求める第1の減算器と、前記求められたトルク軸電圧飽和量を、推定器により推定されたトルク軸過渡電圧飽和量で補正する補正部と、前記補正されたトルク軸電圧飽和量を保持する第1の積分器と、前記保持されたトルク軸電圧飽和量と直交2軸座標の回転角速度とから磁束軸電流指令修正量を求めて出力する磁束軸電流指令修正器と、磁束軸電流指令から前記磁束軸電流指令修正量を減算し磁束軸電流指令修正指令を求めて出力する第2の減算器とを備えている。
(もっと読む)
車両用モータ温度検出装置
【課題】モータのコイルに冷媒が供給された後であっても、コイルの温度をより正確に推定することが可能な車両用モータ温度検出装置を提供する。
【解決手段】温度センサ20は、モータ16のステータコアに設けられている。冷却システム22は、モータ16のコイルに冷媒を供給してコイルを冷却する。温度推定部32は、温度センサによって検出された温度(測定値Ta)に基づいてモータ16のコイルの温度を推定する。温度推定部32は、冷却システム22によってモータ16のコイルに冷媒が供給された始めてから所定時間が経過するまでの第1の期間においては、予め設定された値に基づいてモータ16のコイルの温度を推定し、第1の期間以外の第2の期間においては、温度センサ20によって検出された温度に基づいてモータ16のコイルの温度を推定する。
(もっと読む)
回転機の制御装置
【課題】スイッチング素子の温度が過度に上昇することに起因してスイッチング素子の信頼性が低下することを好適に回避することのできる回転機の制御装置を提供する。
【解決手段】スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、スイッチング素子温度Tthが高いほど、モータジェネレータの指令トルクTrq*を低下させる。そして、低下させた指令トルクTrq*を1次遅れフィルタに入力する。ここでは、スイッチング素子温度Tthが閾値温度T1を上回ると判断された場合、1次遅れフィルタの時定数Tsを小さく設定する。そして、1次遅れフィルタから出力される指令トルクTrqcに基づき、モータジェネレータの電流フィードバック制御を行う。
(もっと読む)
1 - 20 / 288
[ Back to top ]