
Fターム[5H530BB32]の内容
Fターム[5H530BB32]の下位に属するFターム
ロボット、マニュピレータ (25)
ハンドドリル、電動工具 (2)
Fターム[5H530BB32]に分類される特許
1 - 19 / 19
無効電流指令作成部を有するモータ駆動装置
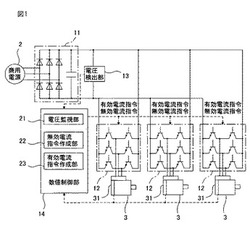
【課題】入力された交流を直流に変換する直流変換部と、直流変換部が出力した直流をモータの駆動のための交流に変換する交流変換部と、を備えるモータ駆動装置において、過電圧異常を抑制することができる、制御が容易で低コストおよび省スペースのモータ駆動装置を実現する。
【解決手段】モータ駆動装置は、入力された交流を直流に変換する直流変換部11と、直流変換部11が出力した直流をモータ3の駆動のための交流に変換する交流変換部12と、直流変換部11の直流出力側の電圧を検出する電圧検出部13と、電圧検出部13が検出した電圧が所定の閾値を超えたとき、交流変換部12が無効電流を出力するよう制御してモータにおける消費電力を増加させる数値制御部14と、を備える。
(もっと読む)
不感帯処理部を備えた電動機の制御装置

【課題】被駆動体を電動機によって同一動作パターンの繰り返し制御を行う場合において、被駆動体を停止させるために電動機の位置指令をゼロにしたときに発生し得る被駆動体の振動を抑制することができる電動機の制御装置を実現する。
【解決手段】電動機Mの制御装置1は、被駆動体2の位置を検出する位置検出部11と、電動機Mに与えられる位置指令と位置検出部11で検出した被駆動体2の位置との位置偏差をサンプリング周期毎に取得する位置偏差取得部12と、位置偏差取得部12により取得した位置偏差が所定の不感帯範囲内に含まれる場合は当該位置偏差をゼロに置き換えて出力する不感帯処理部13と、不感帯処理部13から出力された位置偏差がゼロになるような補正量を算出する繰り返し制御部14とを備え、位置偏差取得部12により取得した位置偏差と繰り返し制御部14により算出された補正量とに基づいて、電動機Mを制御する。
(もっと読む)
モータの制御方法及び装置
【課題】 モータの出力をできるだけ大きなトルクで減速し、しかも、位置決め時のオーバーシュートが小さく、高速に位置決めできる定位置停止制御装置を実現する。
【解決手段】 モータMの回転子の回転速度がオリエンテーション速度になった後、制御部7は、位置ループ速度指令vcにより指令された速度と2乗速度v2との偏差を速度制御器4に与える。速度制御器4から出力されたトルク指令tcに、制御部7が決定したトルク加算指令acを加算部ADで加算して得た加算トルク指令atcをトルク制御器6に与える。オリエンテーション制御に用いる物理変数を用いて定めたスライディングカーブに沿って回転子の位置及び速度を制御することにより、回転子を目標位置に停止させるスライディングモード制御によりトルク制御器の入力を調整する。
(もっと読む)
電源回生機能を有するモータ駆動装置
【課題】逆変換器からの電力供給が持続しているときには整流器の回生動作を確実に継続し、逆変換器からの電力供給が終了したときには整流器の回生動作を確実に停止することができるモータ駆動装置を提供する。
【解決手段】整流器と逆変換器とを備え電源回生を行うモータ駆動装置が、三相交流入力電源の入力電圧及び入力電流を検出する検出部と、検出される入力電圧及び入力電流に基づいて、整流器から逆変換器に供給される瞬時有効電力を演算する瞬時有効電力演算部と、その瞬時有効電力演算部によって演算される電力値に基づいて、整流器から逆変換器に供給される有効電力の直流成分を演算する直流成分演算部と、演算される直流成分の値と所定の閾値とを比較し、直流成分の値が閾値よりも大であれば、逆変換器から供給される回生電力を三相交流入力電源に戻す電源回生動作を停止する判定を行なう回生動作停止判定部と、を備える。
(もっと読む)
故障予知装置及び故障予知方法並びに検査装置
【課題】障害の発生を未然に防いで検査作業の効率化を図る。
【解決手段】故障の発生を予知する故障予知装置において、装置に組み込まされた駆動モータのトルクを検出するトルク検出手段と、当該トルク検出手段で検出したトルクの変動を監視する監視手段と、当該監視手段で監視するトルクが設定基準値の範囲外にあるとき、前記駆動モータの停止、異常メッセージ表示又は警告のいずれか1又は複数を行うことを特徴とする制御部とを備えた。故障予知方法は、前記故障予知装置の処理機能と同様の構成を有する。また、検査装置には、前記故障予知装置の機能を組み込んだ。
(もっと読む)
安全停止回路を備えたモータ制御装置
【課題】 安全停止回路を備えたモータ制御装置において、モータ制御装置を駆動する前に、安全停止回路自体の異常状態をモータ制御装置外部の上位装置がより早く確実に検出することができ、安全性を高めることができる安全停止回路を備えたモータ制御装置を提供する。
【解決手段】 安全停止回路150が、外部のモータ停止スイッチ7,8と、前記モータ停止スイッチ7,8と連動して前記PWM信号を遮断する複数の3ステートバッファ5,6と、前記上位装置が前記安全装置自体の異常を判断できるように構成した監視回路151,152と、を備えた。
(もっと読む)
リニアモータ用ブレーキ回路
【課題】 スイッチング動作時の消費電力を少なくしかつリニアモータの制動力を外部から制御することが可能なリニアモータ用ブレーキ回路を提供する。
【解決手段】 リニアモータの負荷に並列に接続された3相全波整流回路20と、この整流回路から出力されるブレーキ電流を制限する電流制限抵抗3(R11〜R14)と、電流制限抵抗R11、R13に接続された第1のトランジスタM0、M2とこれらのトランジスタに制御信号を出力する制御信号発生回路6a、6bを有する定電流回路4a、4bと、各定電流回路に流れる電流を2段階に調整する第2のトランジスタM11、M14を有するスイッチ回路5a、5bと、これらのトランジスタをオンオフさせるベース駆動回路7を有する。
(もっと読む)
電源回生機能を有するサーボアンプ
【課題】過剰なスペックの装置構成を避けることが可能となり、装置のサイズの最適化(小型化)、コスト削減、省エネルギー化を達成できる電源回生機能を有するサーボアンプを提供すること。
【解決手段】交直変換部分(コンバータ部分)11と直交変換部分(インバータ部分)12とが一体化して構成され、交直変換部分(コンバータ部分)11と直交変換部分(インバータ部分)12とはDCリンク16接続により一体的に構成されている。DCリンク16は例えばショートバーやネジ締めによって構成する。また、パワー半導体15はヒートシンク17表面に配置されている。そして、この交直変換部分(コンバータ部分)11と直交変換部分(インバータ部分)12の一体的構成は、パワー半導体15を挟むようにヒートシンク17上に配置される。交直変換部分(コンバータ部分)11は最適なスペックのものを選択して取り付けることができる。
(もっと読む)
サーボモータの停止方法および停止装置
【課題】制御部を介することなく、サーボモータを安全に停止することができると共に、無駄な電力を消費することなく、停止した状態を保持できる、サーボモータの停止方法を提供する。
【解決手段】制御回路(11)からの制御信号によりサーボモータ(2)を制御する。安全ドア(12)が開になった情報によりコモン支線(COM1)をプラスコモン(COM)から切り離す。これにより第1のゲートドライブ回路群(GD1、GD3、GD5)を作動不能にし、第2のゲートドライブ回路群(GD2、GD4、GD6)の作動によりU、VおよびW相を短絡して、回生制動がかかる状態にする。
(もっと読む)
停止検知装置、停止検知方法および安全システム
【課題】モータの停止判定に用いる閾値設定のばらつきや誤差を低減してモータの停止検知の精度を高める。
【解決手段】モータの逆起電力(BEMF)を検出し、その検出値が、固定の第1の閾値L1以下になった時点t1から設定時間Tが経過したときt2に、モータが停止したと判定するようにし、前記設定時間Tを、デジタル設定スイッチによってデジタル値として設定するようにし、従来のようなアナログボリュームによる閾値の設定を不要としている。
(もっと読む)
モータのサーボ制御装置
【課題】確実にモータの回転速度を零にできるモータのサーボ制御装置を提供する。
【解決手段】モータのサーボ制御装置は、駆動制御部4、制動制御部3、位置検出手段9、位置制御部1、速度検出手段6、速度制御部2、外乱トルクオブザーバ7等を有する。制動制御部3は、外乱トルクTが許容トルク値を超える第一の時点になると、目標電流I1に基づく指令電流I2に代えてモータ8を停止させる方向に作用する最大許容目標電流I1を指令電流I2として出力する。第一の時点以後、指令切換条件を満たす第二の時点になると、最大許容目標電流I1に代えて目標電流I1に基づき指令電流I2を出力する。位置制御部1は、第一の時点から第二の時点までの間のいつかの時点で目標速度V1を零とする。零の目標速度に従ってモータ8をPI制御するので、オフセットの影響を無くし、確実にモータ8の回転速度を零にできる。
(もっと読む)
電動機の可変速駆動制御装置
【課題】力行運転及び回生運転する複数の交流電動機をその一部に備えるとともに、安価な構成で、且つ、高効率及び高力率を得ることができる電動機の可変速駆動制御装置を得る。
【解決手段】力行運転及び回生運転する複数の第一交流電動機3と、各第一交流電動機3を独立に可変速制御する複数の第一インバータ装置4と、常時力行運転する複数の第二交流電動機9と、各第二交流電動機9を独立に速度制御する複数の第二インバータ装置10と、各第一インバータ装置4及び各第二インバータ装置10に接続された共通直流母線5と、共通直流母線5に接続され、各第一インバータ装置4及び各第二インバータ装置10に直流電源を供給する共通ダイオードブリッジコンバータ装置6とを備える。そして、第二交流電動機9により、第一交流電動機3の回生運転時に発生し得る回生エネルギーを力行運転で全て消費できるように構成する。
(もっと読む)
ブレーキ付きモータを駆動し制動するモータ駆動装置
【課題】ロボットアームを動かすモータのブレーキ用コイルの損失(発熱)を減らす。
【解決手段】モータ駆動用電源とブレーキ駆動用電源とに共用されるモータ・ブレーキ駆動用直流電源61を有するブレーキ付きモータ2を駆動し制動するモータ駆動装置6において、モータ・ブレーキ駆動用直流電源61をモータ駆動用電源として用いる間、モータ・ブレーキ駆動用直流電源61から受けた電圧をブレーキに印加する電圧変換回路64は、ブレーキ3に印加する電圧を帰還し制御する。
(もっと読む)
回転軸の定位置停止制御装置
【課題】回転軸が定位置にて停止するまでに要する時間を短縮する。
【解決手段】定位置停止制御装置(10)が、制御周期毎に移動指令を作成する移動指令作成手段(22)と、移動指令作成手段により作成された移動指令に応じて制御周期毎に回転軸(61)を位置制御する位置ループ制御手段(25)と、上位制御装置(45)により作成された速度指令(V0)と所定の速度指令(V1)とのうちの一方の速度指令に応じて回転軸を速度制御する速度ループ制御手段(35)とを具備し、速度ループ制御手段による回転軸の速度制御から位置ループ制御手段による回転軸の位置制御への切換えを行う。この定位置停止制御装置において、移動指令作成手段により作成される移動指令は、回転軸の加減速能力に相当する加速度以下の加速度を有するようにする。
(もっと読む)
電力変換装置
【課題】制動回路の故障および、制動抵抗の異常過熱を検出する故障検出回路を、コストアップすることなく、また実装面積を増大することなく備えることができる電力変換装置を提供する。
【解決手段】制動回路4のスイッチング素子の制御信号S4の有無、逆変換回路6のスイッチング素子の制御信号S5の有無、直流電流検出回路7の検出信号S2の有無の論理構成で故障を検出する故障検出回路12を備えた。
(もっと読む)
主軸制動方法及びその装置
【課題】 主軸モータにかかる切削負荷に応じて、適正な制動をリアルタイムに実施することができる主軸制動方法及びその装置を得る。
【解決手段】 主軸の回転体のイナーシャを演算する主軸イナーシャ演算手段8と、この主軸イナーシャ演算手段8にて演算された主軸イナーシャを記憶する主軸イナーシャ記憶手段9と、主軸にかかる切削負荷トルクを演算する主軸負荷演算手段10と、この主軸負荷演算手段10にて演算した切削負荷トルクを元にブレーキ駆動用モータ13の最大トルクを制限する値を演算するモータトルク制限値演算手段11と、このモータトルク制限値演算手段11にて演算されたモータトルク制限値の値で前記ブレーキ駆動用モータ13を回転させ、直接主軸に制動をかけるブレーキユニット15とを備える構成とした。
(もっと読む)
モータ駆動装置
【課題】 整流回路とインバータ回路とを接続するDCリンクに接続されている蓄電器に蓄えられたエネルギーを電源に回生することで、この蓄電器に蓄えられたエネルギーを低下させることが可能なサーボモータ駆動装置を提供することを目的とする。
【解決手段】 モータ駆動装置1を、DCリンクに接続された蓄電部C1の出力に現われる電圧を昇圧する昇圧型DC/DCコンバータ回路11と、昇圧された直流電力を交流電力に変換して電源に回生するDC/AC変換回路12(14)と、を備えて構成する。
(もっと読む)
サーボモータ制御装置及びその制御方法
【課題】サーボモータの停止時に発生する可能性のある大きなトルクの変動を簡単に抑制する。
【解決手段】 サーボモータを停止させることを指令する停止指令が発生したときに、そのときの速度指令を停止指令時速度指令として速度指令記憶手段5に記憶する。その後、所定時間計数手段7が計数する所定時間、停止指令時速度指令に従って一定速度制御を行う。その後減速指令演算手段9で演算した徐々に減速を行うための減速指令に従って減速制御を行う。停止指令時速度指令に従って一定速度制御を所定時間行った後に減速指令に従って減速制御を行うと、停止動作時のトルク変動を抑制することができる。
(もっと読む)
誘導電動機の制御装置
【課題】電圧型PWMインバータで可変速駆動される誘導電動機の制御装置に、該電動機に減速停止指令が発せられたときの減速停止時間を短縮する機能を付加する。
【解決手段】周波数設定器11と加減速演算器12と電圧振幅指令演算器13と出力電圧調整器14とPWM電圧指令演算器15とPWMパルス演算器16とからなる従来の回路構成に、指令値切替回路17を付加して、誘導電動機6に減速停止指令が発せられたときに出力電圧調整器14をバイパスさせて、誘導電動機6の一次電圧を上昇させる。
(もっと読む)
1 - 19 / 19
[ Back to top ]