
Fターム[5H560AA07]の内容
無整流子電動機の制御 (40,007) | 用途 (2,430) | ロボット、工作機械 (69)
Fターム[5H560AA07]に分類される特許
1 - 20 / 69
変速装置
半導体装置
モータ制御装置及びモータ制御方法
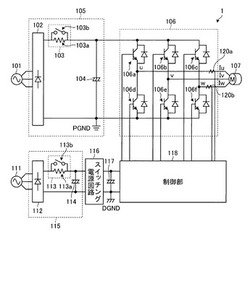
【課題】過渡的に大きな制動電流がコイルに流れてしまうことを防ぎつつ、安全かつ速やかにモータを停止させるためのブレーキ機能を簡素かつ確実に確保すること。
【解決手段】モータ制御装置は、オン状態にされたときにモータ107の3相のコイルを短絡させ、オフ状態にされたときに3相のコイルの短絡を解消する3個のパワー素子106d〜106fと、3相のコイルのうちU相及びW相のコイルに流れる電流を検出する電流センサ120a、120bと、パワー素子106d〜106fをオン状態に制御し、電流センサ120a、120bによって検出されたU相電流及びW相電流並びに電流センサ120a、120bの検出結果に基づいて算出されたV相電流のいずれかが所定の閾値を超えた場合に、パワー素子106d〜106fを所定時間オフ状態に制御し、所定時間の経過後パワー素子106d〜106fをオン状態に制御する制御部118と、を含む。
(もっと読む)
永久磁石同期電動機の永久磁石の不可逆減磁が発生したか否かを検出する制御装置

【課題】永久磁石同期電動機の駆動軸の動作範囲が制限された場合でも永久磁石同期電動機の磁石の不可逆減磁が発生したか否かを適切に検出することができる制御装置を提供する。
【解決手段】正弦波状指令信号生成部17は、永久磁石同期電動機3へのトルク指令に対する正弦波状指令信号を生成する。推定トルク定数計算部23は、正弦波状指令信号の複数周期に亘る同一の動作状態での複数の電流値と複数の加速度値から取得した電流代表値及び加速度代表値と、永久磁石同期電動機3に関連する予め設定されたイナーシャとから、永久磁石同期電動機3に関連する推定トルク定数を計算する。減磁検出部24は、推定トルク定数と永久磁石同期電動機3に関連する予め設定されたトルク定数との差分に基づいて、永久磁石同期電動機3の永久磁石34a,34b,34c,34dに不可逆減磁が発生したか否かを検出する。
(もっと読む)
アクチュエータ、モータ制御システム、及びモータ制御方法
【課題】信頼性又はロバスト性を向上したアクチュエータ、モータ制御システム、及びモータ制御方法を提供する。
【解決手段】アクチュエータは、モータと、モータの回転角を検出する回転角センサと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の変位を検出する位置センサと、モータを制御する制御装置と、を含み、制御装置は、正常時における回転角センサの回転角信号及び位置センサの変位信号の相対関係情報を記憶しており、変位信号を取得し、相対関係情報に基づいて回転角を推定した推定回転角信号を演算し、推定回転角信号に基づいてモータを制御する。
(もっと読む)
電気機械装置、移動体、及びロボット
【課題】電気機械装置の回生動作においてを滑らかに動作させる。
【解決手段】電気機械装置10であって、電磁コイル100u〜wを有する第1の駆動部材15と、前記第1の駆動部材15に対して相対的に移動可能な第2の駆動部材20と、前記電磁コイル100u〜wを駆動するとともに、前記第2の駆動部材20の減速時に前記電磁コイル100u〜wからのエネルギーの回生を行う制御部405と、を備え、前記制御部405は、前記電磁コイル100u〜wに生じる誘起電圧のゼロクロス点を中心とした第1の回生区間を設定して回生を実行する第1の回生モードを有する。
(もっと読む)
電気機械装置、移動体、ロボット及び電気機械装置の温度測定法
【課題】電磁コイルの近傍に別個の温度取得手段を取り付けることなく、電気機械装置や電磁コイルの温度を測定する。
【解決手段】電気機械装置10であって、永久磁石200と、電磁コイル100Aと、前記永久磁石の電気角を検知するためのセンサー300と、前記センサーからの信号に基づいて前記電磁コイルをPWM駆動する制御部(240、400)と、前記電気機械装置の温度測定時に前記電磁コイルと直列に接続される抵抗器715と、を備え、前記制御部は、前記駆動部が前記PWM駆動において前記電磁コイルに駆動電圧を印加しない期間において、前記電気抵抗の両端の電圧を測定し、前記電圧を用いて前記電磁コイルの電気抵抗を取得し、前記電磁コイルの電気抵抗を用いて前記電磁コイルの温度を取得する。
(もっと読む)
モータの磁極位置補正方法
【課題】ダイレクトドライブモータを採用した可動範囲が限定された駆動軸において、ダイレクトドライブモータと位置検出器の取付け誤差を制御装置内で補正する方法を提供する。
【解決手段】モータの磁極位置補正方法は、ダイレクトドライブモータの可動子を機械式ブレーキで拘束し(S9)、指令位置を現在位置と離れた位置に指令し(S10)、ダイレクトドライブモータのトルク指令値を検出し(S12)、トルク指令値と所定の閾値とを比較することにより磁極位置補正値を決定し(S14、S16)、前記決定された磁極位置補正値をメモリに記憶し(S18)、メモリに記憶した磁極位置補正値により求めた電気角オフセット値をモータ制御に用いる。
(もっと読む)
ロボットシステム
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、ロボットの一連の動作時間を短縮しつつ、減速動作時にモータから生じる回生エネルギーを消費する際に発生する熱を低減する。
【解決手段】昇降圧回路29は、入力電圧を昇圧値まで昇圧して出力する昇圧動作と、入力電圧を降圧して出力する降圧動作のうち、いずれかの動作を実行する。制御部27は、加速動作の後に等速動作を経ることなく減速動作が実行される動作パターンに基づいてモータMが駆動される際、加速動作の開始時点から加速動作終盤の切替タイミングまでの昇圧期間に昇圧動作を実行するとともに、切替タイミングから次の加速動作の開始時点までの降圧期間に降圧動作を実行するように昇降圧回路29の動作を制御する。制御部27は、演算により切替タイミングを求めることで昇圧期間の長さを決定する。
(もっと読む)
ロボットシステム
【課題】高トルク運転時にモータに対して十分な電力を供給可能にするとともに、減速動作時にモータから生じる回生エネルギーを有効利用可能にする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。制御部27は、自動モードに設定されるとモータMの動作状態に応じて昇降圧回路29の動作状態を自動的に切り替え、高トルクモードに設定されると昇圧動作を実行するように昇降圧回路29の動作を制御し、省エネモードに設定されると降圧動作を実行するように昇降圧回路29の動作を制御する。制御部27は、回生エネルギーをインダクタL1に蓄積可能な状態となるように昇降圧回路29の動作を制御する機能と、モータMに対するダイナミックブレーキをかけるように昇降圧回路29の動作を制御する機能とを有する。
(もっと読む)
主軸制御装置
【課題】主軸制御装置において、特別な装置を利用することなく、マーカ検出後も所望の回転方向に滑らかに動作できるようにすることである。
【解決手段】主軸制御装置は、起動電流スローアップ処理部3と、定常制御電流演算部6と、起動電流・定常制御電流重畳演算部16とを備える。起動電流・定常制御電流重畳演算部16は、起動電流値を一定もしくは時間経過に応じて小さくし、定常制御電流値を時間経過に応じて大きくして加算されて重畳電流指令値とされる。電流指令切換部9の機能により、電流制御部11には、マーカ信号が出るまでは起動電流値が出力され、マーカ信号が出て設定移行期間が経過するまでは重畳電流値が出力され、設定移行期間後は定常制御電流が出力される。
(もっと読む)
ブラシレスDCモータの駆動制御装置
【課題】ブラシレスDCモータを、非相補的なPWMスイッチング出力を用いて高効率に駆動し、アナログ電流検出回路を用いず、高精度に電流制御する駆動制御装置を実現する。
【解決手段】PWM比決定器5で、駆動中のモータから検出される軸角度及び回転角速度と、モータの駆動に必要な目標電流のみを入力して、各相に流す電流に係る最も効率の良い駆動制御モード及びPWMデューティー比を求め、この駆動制御モード及びPWMデューティー比に基づいてPWM信号発生器4で各相のPWM信号を発生し、このPWM信号に基づき、駆動回路3を構成するハーフブリッジ回路7においてオープン状態を含む状態でモータの各相に駆動電流を与える。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
モータの磁極位置補正方法
【課題】ダイレクトドライブモータを採用した傾斜軸において、ダイレクトドライブモータとエンコーダの取付け誤差を制御装置内で補正する方法を提供する。
【解決手段】トラニオン14に取付けられたダイレクトドライブモータ11を駆動し、トラニオン14を位置制御により所定の角度に位置決めさせる(S10)。トラニオン14が位置決めされている状態で発生しているトルク指令値を検出し(S12)、トルク指令値と予め設定した閾値を比較する(S14)。トルク指令値が、閾値以上であれば磁極位置補正値を変化させ(S16)、再度、トルク指令値を検出し閾値との比較を行う。この動作をトルク指令値が閾値未満になるまで繰り返す(S12〜S16)。トルク指令値が閾値未満となる磁極位置補正値が見つかれば、その値をメモリに記憶する(S18)。この補正値により補正した電気角オフセット値を用いてモータ制御する。
(もっと読む)
回転電動機の制御装置
【課題】回転子の振れを抑制し、トルク変動を抑制する。
【解決手段】モータ200は、回転子1と、回転子1の回転軸心Oに対して軸対称に配置された2つのコイルからなる3相のコイル対U,V,Wを有する固定子3と、を備え、各コイル対U,V,Wのそれぞれのコイルに独立して電流を供給可能に構成されている。このモータ200を制御する制御装置100の回転速度制御器6は、各コイル対のそれぞれのコイルに互いに同位相の駆動電流を供給する。電流合成器11では、各コイル対のそれぞれのコイルに互いに逆位相の軸補正電流を駆動電流に重畳して供給する。
(もっと読む)
ロボット制御装置および制御方法
【課題】角度センサから正常に回転角度が取得できなくなった場合に、迅速にサーボモータを停止させることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、角度センサ160から取得した回転角度に応じてサーボモータの駆動をフィードバック制御する第1の駆動制御部と、サーボモータの電気的変量に基づいてサーボモータの回転角度および回転速度を推定する推定部と、推定された回転角度に応じて、サーボモータの駆動をセンサレス制御する第2の駆動制御部と、サーボモータに対して発電制動を行う発電制動部とを備える。ロボット制御装置200は、角度センサ160の異常を検出すると、推定回転速度が所定の閾値以上の場合には、第2の駆動制御部によってサーボモータを減速させ、推定回転速度が所定の閾値未満の場合には、発電制動部によってサーボモータに発電制動を行う。
(もっと読む)
電動機駆動制御装置。
【課題】電気時定数の長いPMモータを用いた場合でも、大きな負荷変動に対して即座に反応し、定常状態では無駄な電流を一切流さずに済むようにした電動機駆動制御装置を提供すること。
【解決手段】インバータ3によりPMモータ5をベクトル制御する方式の電動機駆動制御装置において、Δθd推定器12によりPMモータ5の軸誤差Δθd を推定し、推定値Δθdc の値に応じて励磁電流指令の補正量ΔId をΔId演算器20により演算し、演算した補正量ΔId を加算器74により励磁電流指令Id*に加算して制御軸上で励磁電流を発生させ、軸誤差Δθd の過渡的な増加時には励磁電流によりPMモータ5のトルクが増大されるようにし、負荷変動の抑制に必要なトルクが瞬間的に補われるようにした。
(もっと読む)
交流電動機のセンサレス制御装置
【課題】 高速域で閉ループ速度制御及びq軸電流制御により高精度な速度及びトルク制御を行い、低速域でq軸電流ループの動作停止によりダンピングを改善し且つ一定速時や停止時の振動を抑圧することができる交流電動機のセンサレス制御装置を提供する。
【解決手段】 推定速度とF/F速度から速度制御器3がF/Bq軸電流指令を出力する。電動機の高速域では速度制御出力切替器7がF/B軸電流指令を出力し低速域では所定の固定値C1を出力する。dq軸電流制御器10、9は電流制御を行い、F/Bdp軸電圧指令を出力する。電動機の高速域ではq軸電流制御出力切替器12がF/Bq軸電圧指令を出力し、低速域では所定の固定値C2を出力する。電圧座標変換部14がdp軸電圧指令を変換して三相電圧指令を作成する。電動機16の電流を変換して電流座標変換部17がdq軸電流を出力し、速度推定器6がdp軸電流とdq軸電圧指令から推定速度を作成する。
(もっと読む)
エンコーダー及び電気機械装置。
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、回転円盤上において等間隔に設けられたスリット又は反射板で構成される光学要素列311〜314と、光学要素列に光を照射する発光部321〜324と、光学要素列の個々の光学要素からの光を受光して矩形状の受光信号を出力する受光部371〜374とを備え、光学要素列は、回転円盤の中心からの距離が互いに異なるn個(nは2以上の整数)の円周に沿ってn列配置されており、n組の光学要素列は、等しい個数のm個(mは2以上の整数)の光学要素を含んでおり、発光部と受光部は、n組の光学要素列に対応してn組配置され、個々の受光信号の1周期の位相差を2πと定義したとき、n組の光学要素列とn組の発光部及び受光部とは、n組の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
エンコーダー及び電気機械装置
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、前記回転円盤上において前記回転円盤の円周に沿って等間隔に設けられたm個(mは2以上の整数)のスリット又は反射板で構成される光学要素列311と、前記光学要素列に光を照射する発光部320と、前記光学要素列の個々の光学要素を透過する、または反射する光を受光して矩形状の受光信号を出力する受光部371〜374と、を備え、前記発光部と前記受光部は、n組配置されており、個々の受光信号の1周期の位相差を2πと定義したとき、n個の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
1 - 20 / 69
[ Back to top ]