
Fターム[5H560DA17]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | 位置検出器の個数が1であるもの (99)
Fターム[5H560DA17]に分類される特許
1 - 20 / 99
ブラシレスモータを始動させる方法
【課題】ロータ位置センサの位置の公差に厳しい精度が要求されない、ブラシレスモータの始動方法を提供する。
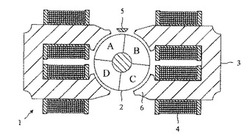
【解決手段】本発明は、ブラシレスモータを始動させる方法に関する。ブラシレスモータ(1)は、ロータ(2)と、少なくとも1つの相巻線(4)を有するステータ(3)と、ロータ位置センサ(5)を有する。上記方法は、巻線(4)を励起させ、ロータ位置センサ(5)が出力した信号を感知することを含む。信号のエッジを第1期間の間に感知した場合には、エッジに応答して、巻線(4)を整流する。信号のエッジを第1期間の間に感知しない場合には、第1期間の終了時に巻線(4)を整流し、信号を感知し、第2期間の間に感知した信号の2つのエッジのうちの第2のエッジに応答して巻線(4)を整流する。
(もっと読む)
モータ駆動装置

【課題】3相DCブラシレスモータ駆動装置において、1個のホール素子によるロータ位置検出でも、安定したモータ駆動を実現できる3相DCブラシレスモータ駆動装置を提供すること。
【解決手段】ロータ位置検出手段として1個のホール素子10を備え、前記ホール素子10からのロータ位置検出信号に基づき励磁コイルの励磁パターンを決定する機能を有したモータ駆動装置において、ロータ位置検出信号から算出されるモータ回転数と目標モータ回転数との乖離量が設定値以下である場合には、前記ロータ位置検出信号の立上りエッジ14もしくは立下りエッジ15の片エッジのみを用いて励磁パターンを決定し、前記乖離量が設定値より大きい場合には、前記ロータ位置検出信号の立上りエッジ14および立下りエッジ15の両エッジを用いて励磁パターンを決定する構成とする。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
永久磁石同期電動機の初期磁極位置調整装置
【課題】インバータの出力電圧を検出しなくても誘起電圧と磁極位置検出信号との位相差を検出し、これを補正可能とした初期磁極位置調整装置を提供する。
【解決手段】インバータにより駆動される永久磁石同期電動機の起動時に、前記電動機の誘導起電力と磁極位置センサによる磁極位置検出信号との位相差を推定し、この位相差により補正した前記磁極位置検出信号を用いて前記インバータを制御するための初期磁極位置調整装置において、電動機の固定子巻線を流れる電流を検出する手段と、検出した電流を用いて前記位相差を推定する手段と、推定した位相差を用いて前記磁極位置検出信号を補正する手段と、備え、位相差推定手段302は、電動機200を空転させた状態でインバータ101のスイッチング素子を制御して電動機200の固定子巻線を短絡させ、無負荷誘導起電力によって流れる巻線電流から前記位相差を推定する。
(もっと読む)
モータの駆動制御装置
【課題】簡素な回路構成と処理プロセスとで高効率にモータを駆動させることができるモータの駆動制御装置を提供する。
【解決手段】モータの駆動制御装置1は、モータ駆動制御部3の出力部6からモータ2の巻線に電力を供給し、モータ2を駆動する。モータ駆動制御部3は、指令情報生成部4と、駆動信号生成部5とを有している。指令情報生成部4には、モータ2の巻線電流情報と回転速度情報との組合せ対応する進角値群が予め記憶されている。指令情報生成部4は、モータ2の巻線電流情報と回転速度情報との組合せに応じて、進角値群から最適進角値を選択し、駆動信号生成部5に、最適進角値情報と速度指令情報とを出力する。駆動信号生成部5は、最適進角値情報と速度指令情報とに応じて、モータ2の駆動信号を出力部6に出力する。最適進角値は、モータ2の回転速度と巻線電流とに応じて、複雑な演算を必要とせずに求められる。
(もっと読む)
回転電機の制御装置
【課題】良好な制御性を維持しながら、電磁騒音の抑制とスイッチングによる発熱の抑制とをより高度に両立することが可能な回転電機の制御装置を提供することである。
【解決手段】制御装置20は、複数のスイッチング素子を含むインバータ13を用いて、モータ11に印加する電圧を制御する。制御装置20は、電圧指令とキャリアとの比較に基づいて、スイッチング素子のスイッチング制御信号を生成するPWM信号生成部24と、予め定められた同期数と、モータ11の回転数とに基づいて、キャリアの基準周波数fcを設定するキャリア制御部27とを備え、キャリア制御部27は、電流指令に基づいて、キャリアの周波数を、基準周波数を整数倍した高周波数の乗算周波数に切り換える一方、同じスイッチング素子に対応する高電流位相領域について、連続して乗算周波数に切り換えない。
(もっと読む)
正逆回転可能なDCブラシレスモータ
【課題】3相以上のブラシレスモータを正逆回転させるよりも制御が容易でかつ安価な、ブラシ及び整流子を用いることなく直流電流で正回転、逆回転の双方向に回転する単相全波整流型又は2相半波整流型DCブラシレスモータを提供する。
【解決手段】上記課題を解決するため、回転子である磁石の極位置を検出する位置センサを備え、前記位置センサの磁極検出信号の出力によりスイッチング素子のオンオフを制御し、ステータに巻かれたコイルへの通電方向を変更する単相全波整流型又は2相半波整流型DCブラシレスモータにおいて、前記位置センサから前記スイッチング素子を制御する回路へ入力する2つの磁極検出信号を入れ替えることで、前記回転子を逆回転させることを特徴とする正逆回転可能なDCブラシレスモータの構成とした。
(もっと読む)
ブラシレスDCモータの制御装置およびそれを用いた送風装置
【課題】ブラシレスDCモータの磁束量ばらつきによるモータ出力ばらつきを抑制することができるブラシレスDCモータの制御装置を提供する。
【解決手段】インバータ回路9、ブラシレスDCモータの回転数を検出する回転数検出手段10、ブラシレスDCモータへの印加電圧を検出する印加電圧検出手段11、ブラシレスDCモータが所望の出力となるように検出した誘起電圧と回転数に基づいてインバータ回路9を制御する出力制御手段12、ブラシレスDCモータの回転数検出と同時に誘起電圧と電気角を検出し、誘起電圧と電気角の検出結果に応じて、出力制御手段12に予め記憶した基準となる印加電圧あるいは印加電圧に比例関係のあるデューティの制御パラメータを変更して、ブラシレスDCモータの磁束量のばらつきを補正する補正手段13を備える。
(もっと読む)
ブラシレスDCモータの制御装置およびそれを用いた送風装置
【課題】ブラシレスDCモータの磁束量ばらつきによるモータ出力ばらつきを抑制することができるブラシレスDCモータの制御装置を提供する。
【解決手段】インバータ回路9、ブラシレスDCモータの回転数を検出する回転数検出手段10、ブラシレスDCモータに供給する電流を検出する電流検出手段11、ブラシレスDCモータが所望の出力となるように検出した回転数と電流を制御する出力制御手段12、ブラシレスDCモータの回転数検出と同時に誘起電圧と電気角を検出し、誘起電圧と電気角の検出結果に応じて、出力制御手段12に予め記憶した基準となる電流の制御パラメータを変更して、ブラシレスDCモータの磁束量のばらつきを補正する補正手段14を備える。
(もっと読む)
モータ制御装置
【課題】モータの脈動振動を効率よく抑制することができるモータ制御装置を提供することである。
【解決手段】上記した目的を達成するため、本発明のモータ制御装置1は、モータ2を回転制御する回転制御手段3と、回転中におけるモータ2の振動を検出する振動検出手段としての加速度センサ4と、加速度センサ4によって検出された振動から特定周波数の振動成分を抽出する特定周波数成分抽出手段5と、特定周波数の振動を当該特定周波数の主振動成分と主振動成分に重畳されている脈動振動成分とに分解する振動成分分解手段6と、上記主振動成分と脈動振動成分の全てを同時に抑制する補償信号を生成して繰返して回転制御手段3へ入力する繰返し制御手段7とを備えた。
(もっと読む)
輸送車両用、具体的にはレール車両用のパワートレイン、および同パワートレインを制御する方法
【課題】ジュールおよびフーコーの効果による回転子の損失を低減することを可能にするパワートレインを提案すること。
【解決手段】輸送車両用のこのパワートレインは、シャフト、固定子および回転子を備える電動機と、直流入力電圧を受け取って電動機に多相電圧を送出する電力供給システムとを備え、このシステムは、電動機の各相の電圧振幅を直流入力電圧で割ったものに等しい変調度、および回転子の回転速度のセンサを有する。このパワートレインは、変調度を変化させるための手段であって、回転子の回転速度が所定の遷移値を下回る値の第1の区間に属するとき、変調度を変化させるための手段がない状態の変調度に対して変調度を減少するように適合され、回転子の回転速度が所定の遷移値を上回る値の第2の区間に属するとき、変調度を変化させるための手段がない状態の変調度に対して変調度を増加するように適合される手段を含む。
(もっと読む)
回転機の制御装置
【課題】インバータIVとモータジェネレータ10との間の電気経路が断線するなどの異常を診断できないこと。
【解決手段】ノルム設定部32では、要求トルクTrと電気角速度ωとに基づきインバータIVの出力電圧ベクトルのノルムVnを設定する。位相設定部30では、要求トルクTrと推定トルクTeとの差を入力とする比例要素および積分要素の出力同士の和に基づきインバータIVの出力電圧ベクトルの位相δを設定する。操作信号生成部34では、ノルムVnや位相δ等に基づきインバータIVの操作信号を生成して出力する。位相δの値に基づき上記断線等の異常の有無を診断する。
(もっと読む)
永久磁石型三相交流電動機の制御装置
【課題】出力トルクが間欠的に変化する永久磁石型三相電動機を駆動するインバータに搭載されているパワー半導体スイッチの温度変化幅を小さくしてサーマルサイクルによる熱劣化を防止する。
【解決手段】永久磁石型三相電動機を駆動するインバータに与えられるトルク指令が小さくトルク分電流であるq軸電流が小さい場合には、磁束分電流でありマイナスの値を有するd軸電流を増加させ、またトルク指令が大きくトルク分電流であるq軸電流が大きい場合には磁束分電流でありマイナスの値を有するd軸電流を減少させるd軸電流指令演算器を具備し、パワー半導体スイッチに流れる電流となるq軸電流とd軸電流のベクトル和が一定の所定値となるようにしてパワー半導体スイッチで生じる導通損失を一定とすることでパワー半導体スイッチの温度を一定に保つ。
(もっと読む)
モータのトルク制御装置
【課題】モータに任意波形のトルク出力を発生させるモータ制御装置におけるモータのトルク出力の周期性外乱および電気・機械共振をオンラインで抑制できる。
【解決手段】モータのトルク出力からトルク周期性外乱をオブザーバ21で直接に推定してトルク指令値補正してトルク周期性外乱を抑制し、トルク出力の周波数成分による電気・機械系の共振現象を、トルク指令値T*からトルク検出値Tdetまでの周波数成分別のシステム伝達関数として同定し、この周波数成分別の同定結果の逆数を用いた共振抑制テーブル23でトルク指令値を生成する。また、任意波形のトルク指令値を直流分のトルク成分と直流以外のトルク成分に分離し、直流分のトルク成分はd軸q軸電流指令値に変換し、直流以外のトルク成分はオブザーバが周期性外乱を複素ベクトルで表現して周期性外乱を求める場合の実部成分と虚部成分に分解して該オブザーバに周期性外乱電流指令値とする。
(もっと読む)
モータの制御装置
【課題】モータの環状の2ロータが内外に出力軸に対して同軸に配置される二重構造において両ロータ間の位相差を変更する機構を小型化することができ、これによってモータ全体を小型化すること。
【解決手段】ステータ14の内周側に配置され、永久磁石12aを有して界磁束を発生する外側ロータ12と、永久磁石11aを有し、外側ロータ12に対する相対角度位置により界磁束を調整する内側ロータ11とを有するモータ10であって、ECU25cが、両ロータ11,12間の位相差を変更する際に、両ロータ11,12間に生じる磁力トルクを打ち消すトルクを発生させるようにステータ14に界磁電流を流し、更に、その磁力トルクの打ち消し後に内側ロータ11を回転させるトルクを発生するように当該界磁電流を強める制御を行う。
(もっと読む)
モータ駆動回路
【課題】モータの回転速度に応じてソフトスイッチの期間を変化させることができるモータ駆動回路を提供する。
【解決手段】モータの回転位置を示すホール信号VH1とVH2に基づいて、V1のレベルがV2のレベルより高くなる期間が、V2のレベルがV1のレベルより高くなる期間より長くなるようVH1、VH2信号のうち何れか一方のレベルをシフトするレベルシフト回路51と、V3のレベルがV4のレベルより高くなる期間が、V4のレベルがV3のレベルより高くなる期間より短くなるようVH1、VH2のうち何れか一方のレベルをシフトするレベルシフト回路52と、V1、V2が交差する第1タイミングとV3、V4が交差する第2タイミングとを検出するコンパレータ53、54と、第1タイミングと第2タイミングとの間の期間だけモータのコイルの駆動電流を徐々に変化させるための指示信号Vsswを出力する出力回路と、を備える。
(もっと読む)
永久磁石モータのトルクリプル抑制制御装置、電動パワーステアリングシステム
【課題】トルクリプルの直流成分を有効に使うことができるトルクリプル抑制制御装置および電動パワーステアリングシステムを提供する。
【解決手段】誘起電圧係数設定部8は、位置検出器5からの位置検出値θdcに基づいて永久磁石モータ1の誘起電圧係数に関する情報信号Ked,−Ked,−ΔKed,Keqおよび−ΔKeqを出力する。トルクリプル抑制演算部9は、この各情報信号に基づいて電流補正指令値ΔId*,ΔIq*を出力する。電流補正指令値ΔId*,ΔIq*は、電流指令変換部7からの電流指令値Id0*,Iq0*と加算され、電流指令値Id*,Iq*として電流制御演算部10へ出力される。電流制御演算部10は、電流検出値Idc,Iqcに基づいて電圧指令値Vdc*,Vqc*を座標変換部11へ出力する。座標変換部11は、電圧指令値Vdc*,Vqc*と位置検出値θdcを用いて三相交流の電圧指令値vu*,vv*,vw*を電力変換器2へ出力する。
(もっと読む)
交流モータの制御装置
【課題】オフセット電流の発生を抑えつつ、より高回転まで矩形波制御が可能な交流モータの制御装置を提供する。
【解決手段】制御装置30は、センサ25の出力に基づいて定まる電気角の1周期内において、各相のスイッチング基準位相に対しての各相の矩形波電圧の電圧位相の変化量をスイッチングごとに等しく増加または減少させる。制御装置30は、電気角の2周期以上の所定周期ごとに矩形波電圧の電圧位相変化の合計量を算出する第1の制御部と、所定周期に一度の割合で合計量に関連する情報を第1の制御部から受取り、各相のスイッチング基準位相に対する位相差を更新する第2の制御部とを含む。第2の制御部は、各相のスイッチング基準位相に対する第n番目のスイッチングの位相差を、合計量を所定周期内のスイッチング回数で除算した単位増減量のn倍に設定する。
(もっと読む)
パワーステアリング装置
【課題】 簡単な工程で各電流検出手段の検出誤差を常時補正できるパワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置1において、ブラシレスモータ50を制御するECU6は、相電流センサ33u,33vによって検出された各相の実供給電流Iureal,Ivreal,Iwrealの所定周波数成分よりも高周波の成分を打ち消すように第1指令電流補正値が補正された補正後目標電流Iq**を演算する指令電流値補正処理Aと、を有する。
(もっと読む)
交流電動機の駆動制御装置及び基準磁束演算装置
【課題】制御モードを切り替えることなくシームレスで交流電動機を駆動制御する。
【解決手段】基本コンポーネント演算器34は、トルク誤差等に応じて基本係数を演算する。デルタ演算器36は、基本係数に応じ、基本係数が増加するに従って0度から60度まで順次増加するように非切替領域の角度Deltaを演算する。基準磁束軌跡演算器32は、角度Deltaを用いて基準磁束の軌跡を演算し、最大基準磁束ψmax*及び最小基準磁束ψmin*を演算する。切替パターン演算部34は、磁束がψmax*とψmin*との間にあり、位相角がDelta内のときにはインバータ26の出力電圧ベクトルを切り替えることなく維持する。これにより、インバータ電圧が高周波スイッチングから矩形形状にシームレスに変化していく。
(もっと読む)
1 - 20 / 99
[ Back to top ]