
Fターム[5H560GG03]の内容
無整流子電動機の制御 (40,007) | 設定部 (712) | デジタルによるもの (670)
Fターム[5H560GG03]の下位に属するFターム
計算機、記憶手段を用いるもの (609)
Fターム[5H560GG03]に分類される特許
1 - 20 / 61
ブラシレスモータの駆動制御装置およびハンチング防止方法
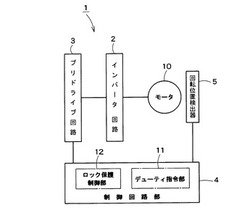
【課題】ハンチングを未然に防止する。
【解決手段】ステータに設けられた複数相の電機子コイルに流す電流を制御することにより、ロータを回転させるブラシレスモータの駆動制御装置1は、複数相の電機子コイルに対して通電を行なうインバータ回路2と、インバータ回路2を駆動するための駆動信号を生成するプリドライブ回路3と、単位時間ごとにロータの回転位置を検出するとともに、検出された回転位置に同期して単位時間ごとにパルス列が変化する複数のパルス信号を生成する回転位置検出器5と、ロータの回転方向が逆回転方向から正回転方向に変化する際に、プリドライブ回路3に対して駆動信号のオンデューティ比を増大させるデューティ指令部11と、を備える。
(もっと読む)
ブラシレスDCモータの駆動方法およびその駆動回路

【課題】 モータコイルに流れる電流波形の急峻な変化をなくすことで、振動による騒音を抑えたブラシレスDCモータの駆動回路を提供する。
【解決手段】 速度検出器が出力するFG信号を進相させた進相信号から生成した第1の三角波信号と、基準クロックから生成した第2の三角波信号の電位レベルを比較器により比較してPWM信号を生成させる。モータ駆動信号の立上りと立下りをこのPWM信号に置き換えることにより、モータコイルを駆動する電流変化を緩やかにする。
(もっと読む)
モータの回転制御装置及び方法、並びにそれを用いた画像形成装置
【課題】 瞬間的にクロックが入力されなかった場合でも回転を維持できるPLL制御を用いたモータの回転制御装置及び方法、並びにそれを用いた画像形成装置を提供する。
【解決手段】 PLL制御部12がクロックCKと位置検出信号Stとの差を偏差信号Seとして出力し、コントロール部202が偏差信号と位相検出信号Sfとから駆動信号Smを出力する、モータの回転制御装置において、コントロール部は、偏差信号が入力された場合、駆動信号を遅延させた遅延駆動信号Smdを出力し、遅延駆動信号の出力を開始してから所定時間が経過した後、駆動信号を遅延させずに出力し、モータの使用回転速度は最低回転速度の2倍以上であり、遅延時間は使用回転速度に対応するクロック周期の2倍以上の整数倍であり、所定時間は遅延時間以下である。これにより、瞬間的にクロックが入力されなかった場合でもモータの回転を維持することできる。
(もっと読む)
永久磁石同期モータの駆動装置、空気調和装置、換気扇の駆動装置、洗濯機、自動車及び車両
【課題】永久磁石同期モータが強制的に回転させられた場合に生じる回生電圧を部品点数の増加なしに抑制して低コスト化できる永久磁石同期モータの駆動装置、空気調和装置、換気扇の駆動装置、洗濯機、自動車及び車両を得ることを目的とする。
【解決手段】インバータ制御手段50は、回生運転時に、直流電圧検出手段90が検出した回生電圧と予め設定した直流電圧指令値の偏差に基づいて、インバータ40と永久磁石同期モータ30の線間を開放させる時間と短絡させる時間の比率を可変するようにした。
(もっと読む)
モータ駆動制御装置並びに空気調和機、換気扇及びヒートポンプタイプの給湯機
【課題】外風によりファンが回転して、当該ファンの回転により発生するモータの起電力からモータ駆動制御装置を保護することができ、モータ巻き線のターン数を増加させることができ、モータ電流を低減することができるモータ駆動制御装置を得る。
【解決手段】ファンを回転させるモータ7を駆動するモータ駆動制御装置であって、直流電圧を交流電圧に変換してモータ7に印加するインバータ回路5と、インバータ回路5を制御してモータ7の運転を制御する制御手段とを備え、インバータ回路5は、モータ7の巻き線の各相の両端毎にスイッチング素子を有し、制御手段は、スイッチング素子のスイッチパターンを制御して、モータ7の運転を制御するものである。
(もっと読む)
モータ制御装置、モータ制御システム、画像形成装置
【課題】制御用ICには変更を加えないか変更を最小限にして、ステッピングモータの制御信号をDCモータの制御信号に変換できるモータ制御装置等を提供すること。
【解決手段】STMの励磁方式、回転位置検出手段の分解能を励磁方式に応じて補正する分解能情報、及び、DCモータ89と被回転体のギヤ比情報、に応じて生成された前記前記回転速度指示情報に基づき、前記コントローラが生成したSTMの補正後制御信号を取得し、DCモータ89の目標位置を決定する目標値決定手段81と、回転位置検出手段の分解能に応じた単位回転量を前記被回転体の回転に応じてカウントして、DCモータの回転位置を決定する状態決定手段82と、目標位置と回転位置、又は、目標速度と回転速度、の少なくとも一方に基づき決定したDCモータの制御量に応じて、DCモータの回転速度を制御するPWM信号を生成するPWM信号制御手段83〜87とを有することを特徴とする。
(もっと読む)
電動機駆動制御装置。
【課題】電気時定数の長いPMモータを用いた場合でも、大きな負荷変動に対して即座に反応し、定常状態では無駄な電流を一切流さずに済むようにした電動機駆動制御装置を提供すること。
【解決手段】インバータ3によりPMモータ5をベクトル制御する方式の電動機駆動制御装置において、Δθd推定器12によりPMモータ5の軸誤差Δθd を推定し、推定値Δθdc の値に応じて励磁電流指令の補正量ΔId をΔId演算器20により演算し、演算した補正量ΔId を加算器74により励磁電流指令Id*に加算して制御軸上で励磁電流を発生させ、軸誤差Δθd の過渡的な増加時には励磁電流によりPMモータ5のトルクが増大されるようにし、負荷変動の抑制に必要なトルクが瞬間的に補われるようにした。
(もっと読む)
ブラシレスDCモータ駆動装置とそれを搭載した換気送風装置
【課題】ブラシレスDCモータとそれを搭載した換気送風装置において、電流検知のばらつきを抑えることができ、より精度良く簡単な構成で風量を略一定に制御することを目的とする。
【解決手段】機能トリミングされた電流検知手段6は、インバータ回路5を介して固定子1に流れる電流の実効値に応じたパルス信号に変換する。風量制御手段7は、風量演算手段8と電力指示手段9を備えており、駆動手段4の回転信号と電流検知手段6のパルス信号から目標風量との差異を算出する風量演算手段8と固定子1に供給する電力を増減するように駆動手段4に指示信号を与える電力指示手段9で構成されているため、精度良く簡単な構成で風量を略一定に制御することができる。
(もっと読む)
駆動装置
【課題】有段変速機の変速段を変更する際にバッテリへの過大な電力の供給をより確実に抑制する。
【解決手段】変速機の変速段が変更中でないときには第1のキャリア周波数Fhiを用いてPWM信号を設定してモータを駆動するインバータをスイッチング制御し(S110,120,140)、変速機39の変速段が変更されている最中には第1のキャリア周波数Fhiよりも低い第2のキャリア周波数Floを用いてPWM信号を設定してインバータをスイッチング制御するため(S110,130,140)、変速段の変更中はモータの電流の脈動(リプル電流)を大きくして損失を増加させてモータの消費電力が不足するのを防止するから、モータからのパワーが減少した場合であってもバッテリに過大な電力が供給されるのを抑制することができる。
(もっと読む)
モーター制御回路
【課題】モーターの高速回転時にも好適なモーター制御を行うことが可能なモーター制御回路を提供すること。
【解決手段】モーター201の転流制御を行うモーター制御回路101は、モーターの転流タイミングを判断するための基準カウンタとなるフリーランニングタイマ111と、モーターの転流タイミングにおいてフリーランニングタイマが示すカウント値に相当する基準カウント値を格納するためのタイマレジスタであって、基準カウント値を演算する演算回路301から基準カウント値が入力されるタイマレジスタ121と、タイマレジスタから入力され、フリーランニングタイマのカウント値との比較用に使用される基準カウント値を格納するための比較バッファ122と、フリーランニングタイマのカウント値と、カウント値と基準カウント値との比較結果を示す信号を出力するコンパレータ131とを備える。
(もっと読む)
モータ制御装置
【課題】複数のモータを制御する場合、信号を伝送する信号線の数を少なくすることができるモータ制御装置を提供する。
【解決手段】第1モータ403の信号と第2モータ404の信号を交互に時分割で伝送することで、FG信号、ACC信号、DEC信号はそれぞれ1本の信号線で伝送される。ACC/DECモジュール220がFG1信号とFG2信号を識別するために、FG1信号とFG2信号は異なる電圧レベルを持つ。ACC/DECモジュール220は、モータからのFG信号の周波数と目標速度のFG信号の周波数を比較する。ACC/DECモジュール220は、目標速度よりモータの速度が遅い場合、ACC信号をその差分だけ出力して加速させ、逆に、目標速度よりモータ速度が速い場合、DEC信号をその差分だけ出力して減速させる。
(もっと読む)
モータ制御装置
【課題】回路面積を削減し、コストを低減できるモータ制御装置を提供する。
【解決手段】モータ制御装置1は、3相ブラシレスモータ2へ3相各相の駆動電流を供給するドライバ3U、3V、3Wに接続されたシャント抵抗4U、4V、4Wに発生する電圧を増幅するアンプ11U、11V、11Wと、アンプ11U、11V、11Wにより増幅された電圧をサンプリングして保持するサンプルホールド回路12U、12V、12Wと、サンプルホールド回路12U、12V、12Wにより保持されている電圧値を順次選択して出力するマルチプレクサ13と、マルチプレクサ13の出力信号をA/D変換するA/D変換器14と、A/D変換器14の出力信号から前記駆動電流を算出し、前記駆動電流に基づいて、モータ2の磁極位置を推定し、ドライバ3U、3V、3Wを制御して前記駆動電流をPWM制御する演算部15と、を備える。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTがフィードバックされ、検出操舵トルクTを指示操舵トルクT*に近づけるように、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。加算角αは、加算角リミッタ24による制限を受ける。検出操舵トルクTが飽和状態となると、制限値変更部27は、加算角リミッタ24による制限値を既定値よりも小さな値に変更する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動パワーステアリング装置の大型化に伴い、モータ電流が大電流化するなどアナログ検出値が増大しても、AD変換回路の分解能を変更することなく、アナログ値を精度良くデジタル値に変換して電動パワーステアリング装置を正確に制御し、ハンドル操作の違和感を感じさせない電動パワーステアリング装置の制御装置を提供する。
【解決手段】AD変換回路に入力するアナログ値をAD変換回路が精度良く変換できる値にシフトさせ、アナログ値からデジタル値に精度良く変換した後で、シフトした値を元に戻すことによりアナログ入力値を広い範囲に亘り精度良く変換できる。
(もっと読む)
ブラシレスモータ起動方法及び制御装置
【課題】 ブラシレスモータを確実に起動させると共に、起動時間の短縮を図ることを可能としたブラシレスモータ起動方法及び制御装置を提供すること。
【解決手段】 3相のコイルを有するステータ14と、ステータ14に対応して設けられた4極のマグネットロータ15とを備えたセンサレスのブラシレスモータ11を起動させる3相4極のブラシレスモータ起動方法または制御装置であって、ブラシレスモータ11の起動に際して、3相のコイルのうち3相のコイルに対して通電を行い、3相通電のうち、2相の通電をPWM信号による漸次増加するデューティで制御する。
(もっと読む)
モータ制御回路及びこれを備えたモータ装置
【課題】ロータ10の位置検出結果が理想的なDuty50%とならない場合でも、精度よくソフトスイッチング開始位置の検出を行える新規なモータ制御回路及びモータ装置。
【解決手段】ロータ10の回転周期の時間をカウンタにて測定し、直前の前記ロータ1回転周期の時間及びソフトスイッチングに要する時間に基づいてロータ1回転周期のロータの極数分の1の時間基準でソフトスイッチング開始位置の演算を行なう。これによって、位置検出信号が理想的なDuty50%の出力とならない場合でも、精度よくソフトスイッチングの開始位置を検出できる。
(もっと読む)
モータ駆動装置
【課題】マイコンの指令によって特定の制御系への電源供給を遮断するモータ駆動装置を提供する。
【解決手段】モータ駆動回路65には、モータ用電源Vpp、及び制御用電源Vaが供給される。モータ用電源Vppはインバータ回路65aに接続され、制御用電源Vaはモータ駆動ICに接続されている。遮断回路66は、マイコン61からデューティ比制御信号とは別のオン・オフ指令信号を受けて、制御用電源Vaからモータ駆動ICへの電源供給を遮断する。その結果、待機時、モータ駆動ICでの電力消費が防止される。
(もっと読む)
PMモータの制御装置及び制御方法
【課題】周期的な外乱であるトルクリプルを精度よく抑制することができるPMモータの制御方法及び制御装置を提供すること。
【解決手段】本制御装置は、モータ角速度ω、非線形摩擦補償トルクTf(ω)、及びモータトルク指令値Tref等からトルクリプル値を推定するトルクリプル推定手段と、第1のスイッチを外乱1周期の間のみオンにして、トルクリプル推定手段によって推定したトルクリプル値から繰り返し補償信号を生成し、かつ、周期外乱データをメモリに保存し、第2のスイッチをオンにして、周期外乱データを、1サンプル先の予見値を与える外乱補償信号として順番に出力することで補償を行う周期信号発生器とを備えている。
(もっと読む)
車両駆動用モータ制御装置
【課題】冷却機能を有する車両駆用モータ制御装置において、冷媒管中の冷媒の流通が滞った場合におけるモータ制御装置の温度上昇を回避することを目的とする。
【解決手段】コントロールユニット26は、昇圧コンバータ12、第1インバータ14、および第2インバータ18がそれぞれ備えるIGBTの測定温度に基づいて、冷却水の推定温度を求める。また、コントロールユニット26は、昇圧コンバータ12、第1インバータ14、および第2インバータ18がそれぞれ備えるIGBTの測定温度に基づいて、またはポンプ40の動作状態に基づいて冷却系の異常を検出する。コントロールユニット26は、異常が検出されたときには、推定温度にオフセット値を加えた値に対しトルク制限マップによって示されるトルク制限値に基づいて第2モータジェネレータ20を制御する。
(もっと読む)
モータ制御方法、モータ制御装置、ファン装置、圧縮機及びポンプ装置
【課題】回転数を安定させることができるモータ制御装置を提供する。
【解決手段】回転子3bがK個の所定の電気角、例えば60°、180°、300°の何れかに位置すると位置検出センサーが検出したことを契機として、モータ3に与える電圧ベクトルを更新する。そして、例えば回転数が規定値以上であるときに、所定の電気角をM個、例えば60°の1個に変更する。
(もっと読む)
1 - 20 / 61
[ Back to top ]