
Fターム[5H560GG04]の内容
無整流子電動機の制御 (40,007) | 設定部 (712) | デジタルによるもの (670) | 計算機、記憶手段を用いるもの (609)
Fターム[5H560GG04]に分類される特許
1 - 20 / 609
電気角推定装置、モータシステム、電気角推定方法及びプログラム
車両用操舵装置
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
交流モータの制御装置および制御方法

【課題】電圧の位相制御を行う交流モータの動作状態における電流オフセットを検出し、電圧波形を制御することで電流オフセットを抑制、除去する交流モータの制御装置および制御方法を提供する。
【解決手段】電流検出手段97U〜97Wおよび位相検出手段95を備える交流モータ9の電流オフセット量を考慮して電圧波形を制御する交流モータの制御装置1であって、トルク指令値Treqに基づいて電圧位相θvを設定する手段12と、各相電流iu〜iwからそれぞれオフセット量IU0、IV0、IW0を検出する手段11と、電気角の半周期ごとに電圧波形をパルス幅変調波形pwmまたは矩形波形に切り替え制御するタイミングtmgを得る手段13と、オフセット量IU0、IV0、IW0の正負に応じて半周期ごとにパルス幅変調波形pwmと矩形波形に切り替える手段16と、を有する。
(もっと読む)
ブラシレスモータ用制御装置およびそれを備えた洗濯機
【課題】簡単、安価な構成および簡単な演算での回転位置センサの取付誤差を補正して、振動、騒音を低減できるブラシレスモータ用制御装置およびそれを備えた洗濯機を提供する。
【解決手段】ブラシレスモータ用制御装置5は、ホールセンサ55u,55v,55wの出力に基づいて、複数のホールセンサ55u,55v,55wの複数の間隔データを得ると共に、複数の間隔データの平均値を求める誤差検出部80とを備える。上記複数の間隔データおよび平均値はセンサ誤差メモリ部65に記憶される。センサ誤差補正部66は、上記間隔データおよび平均値に基づいて、ホールセンサ55u,55v,55wの間隔のズレを補正する。これにより、角速度推定部67は、ホールセンサ55u,55v,55wの間隔のズレを補正した結果を示す信号に基づいて、ブラシレスモータ4のロータの回転速度を正確に求めることができる。
(もっと読む)
ブラシレスモータの駆動装置、ブラシレスモータの始動方法、ブラシレスファンモータの駆動装置、及びブラシレスファンモータの始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスファンモータの駆動装置、及び始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
モータ制御装置
【課題】安定性を確保した位置センサレスの正弦波通電が可能なモータ制御装置を提供する。
【解決手段】モータ制御装置は、単相交流電源を入力とする整流回路と、整流回路と接続され、整流回路で得られた直流電力を三相交流電力に変換し、接続されるモータを駆動するインバータと、小容量のコンデンサと、インバータを制御する制御装置と、単相交流電源のゼロクロス点を検出するゼロクロス点検出回路とを備え、制御装置は、モータの回転数を設定する回転数設定手段と、モータの回転数を補正する第1の回転数補正手段と、第1の回転数補正手段とは異なる方式でモータの回転数を補正する第2の回転数補正手段と、ゼロクロス点の検出からの経過時間に応じて第1および第2の回転数補正手段の一方を選択する回転数補正選択手段とを含む。
(もっと読む)
内接ギアポンプユニット
【課題】低回転から高回転まで、ロータの回転角度をより高精度に検出することが可能な内接ギアポンプユニットを提供する。
【解決手段】インナギア31とアウタギア32と電動モータとモータ制御手段60と磁界検出手段51Aとを備え、電動モータは周方向に複数の磁極が配置されたロータ33と複数のコイルとを有し、モータ制御手段は、コイルに通電するための通電手段と、通電していないコイルに発生する誘起電圧を検出可能な誘起電圧検出手段と、を各コイルに対応させて有しており、出力軸の回転時において、磁界検出手段からの検出信号に基づいて検出した第1検出ロータ角度と、出力軸の回転時において、通電していないコイルに対応する誘起電圧検出手段からの検出信号に基づいて検出した第2検出ロータ角度とを求め、第1検出ロータ角度と第2検出ロータ角度に基づいて補正した第1検出ロータ角度に基づいてそれぞれのコイルへの通電を制御する。
(もっと読む)
多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置
【課題】 回転角センサの取り付け位置ずれ等による角度誤差を、多相回転機を搭載対象に搭載したままの状態で検出する多相回転機の制御装置を提供する。
【解決手段】 3相モータ(多相回転機)の制御装置であるマイコンは、モータに取り付けられた回転角センサの取り付け位置ずれ等による角度誤差Δθを算出する処理を実行する。まず、d軸およびq軸電流指令値を0アンペアに設定する(S00)。次に、モータの回転軸を外部から回転させ(S10)、逆起電圧によって流れる相電流を検出し(S30)、3相2相変換する(S40)。制御器は、電流検出値が0アンペアになるように電圧指令値Vq、Vdを出力する(S50)。角度誤差算出手段は、電圧指令値Vq、Vdに基づいて角度誤差Δθを算出し(S70)、角度補正値として記憶する(S90)。以後、回転角センサの検出値から補正値を差し引いて補正する。
(もっと読む)
スイッチング回路の制御装置
【課題】スイッチング回路の損失を低減させる。
【解決手段】所定のスイッチング周期において、ハイ側スイッチング素子のオンデューティとロー側スイッチング素子のオンデューティとを独立に設定可能なPWM演算部25を備え、PWM演算部25は、前回までの複数のスイッチング周期におけるオンデューティの積算値を算出する通電割合演算部25aを備える。PWM演算部25は、通電割合演算部25aによって算出されたオンデューティの積算値に基づいて、順方向電流が流れていないスイッチング素子のオンデューティを設定する。
(もっと読む)
駆動装置、及び停止位置検出方法
【課題】モータの駆動を開始する際におけるロータの位置の検出において、モータに電力を供給する電源装置にかかる負荷を抑える。
【解決手段】駆動装置は、コイルごとに設けられたスイッチング素子を有し、スイッチング素子のオンとオフとを切り替えてコイルに通電するインバータ部と、コイルに流す電流の向きを示す複数の通電パターンから順に1つずつ選択し、選択した通電パターンに基づいてスイッチング素子のオンとオフとを、電源装置が供給できる最大電流値に応じたデューティ比で切り替えてコイルに通電させる通電パターン決定部と、通電パターンごとに、コイルに流れる電流の電流値が目標電流値に達するまでの時間である通電時間を計測する電流印加時間計測部と、電流印加時間計測部が計測した通電パターンごとの通電時間に基づいて、ロータが停止している位置を推定するロータ停止位置推定部とを備える。
(もっと読む)
モータ駆動装置、集積回路装置、モータ装置、及びモータ駆動システム
【課題】上位装置から入力される動作指令情報がシリアルデータ形式及びパラレルデータ形式のいずれの場合であっても対応可能なモータ駆動装置を提供する。
【解決手段】モータ駆動装置21は、動作指令情報が入力される通信経路選択部22と、動作指令情報に基づいて駆動制御信号を出力する通信部23と、駆動制御信号に基づいてモータ50を駆動する駆動制御部24とを備えている。通信部23は、通信経路選択部22にシリアル通信経路11aを介して接続されたシリアルインターフェース部28と、通信経路選択部22にパラレル通信経路12aを介して接続されたパラレルインターフェース部29とを有する。通信経路選択部22は、シリアルデータ形式又はパラレルデータ形式の動作指令情報が共通の入力経路13を介して入力されると、そのデータ形式に応じて、シリアル通信経路11a又はパラレル通信経路12aを動作指令情報の出力経路として選択する。
(もっと読む)
モータ駆動装置、及びそれを用いたヒートポンプ装置
【課題】DCバスGND電位変動やコモンモード電位変動の影響を受けることなく、起動前のモータの回転数を把握することができるモータ駆動装置を提供する。
【解決手段】モータ駆動装置20では、回転数推定部28が、ファンモータ51の起動前に、巻線間電圧検出部27による検出値からファンモータ51の回転数を推定する。マイクロコンピュータ30が、起動前のファンモータ51の推定回転数が所定回転数未満と判断したとき、駆動電圧がファンモータ51に出力される。また、マイクロコンピュータ30が、起動前のファンモータ51の推定回転数が所定回転数以上と判断したとき、駆動電圧はファンモータ51に出力されない。
(もっと読む)
モータ制御装置
【課題】過渡時におけるロータ位置の検出精度を向上させる。
【解決手段】同期モータ12のロータ位置をセンサレスで検出する機能を備えたモータ制御装置10であって、誘起電圧波高値Ep、電流電気角θiから誘起電圧電気角θeを減じた減算値(θe−θi)の2つのパラメータで規定される電流位相βを予め記憶する位相記憶部と、これに記憶されたβを参照することにより、電流極座標変換部26で検出されたθi、並びに、誘起電圧極座標変換部28で検出されたEp及びθeに基づいて、βを選定する位相選定部と、このβを第1の変数とし前記検出されたθiを第2の変数とするロータ計算式からロータ位置θmを算出するロータ位置演算部と、を含むロータ位置検出部30を備えて成る。そして、位相選定部においてβを選定するときに、前記検出されたEp及びθeを、コイルに流れる電流の変化に応じて補正する補正部32を更に備えたものである。
(もっと読む)
電動パワーステアリング装置および設定方法
【課題】トルク計などの計測器を用いることなく、装置全体での製造ばらつきなどを考慮して左右の操舵特性をバランスさせることができる技術を提供する。
【解決手段】同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度検出装置と、2つの回転軸のいずれか一方の回転軸に駆動力を付与する電動モータと、相対角度検出装置からの出力値と記憶領域に記憶された補正値とに基づいて操舵トルクを検出するトルク検出部と、補正値を設定する中立補正値設定部と、を備え、中立補正値設定部は、電動モータが右方向に予め定められた所定回転速度で回転したときの相対角度検出装置からの出力値である右側出力値と、電動モータが左方向に所定回転速度で回転したときの相対角度検出装置からの出力値である左側出力値とに基づいて補正値を設定する。
(もっと読む)
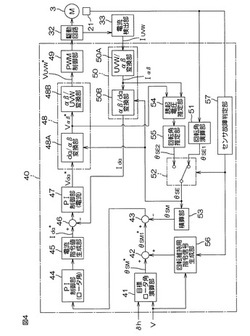
回転機の制御装置
【課題】高周波電圧信号を小さくすると、電気角の推定精度が低下すること。
【解決手段】高周波電圧信号設定部50では、高周波電圧指令信号を設定する。操作信号生成部22では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ58は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。外積演算部60は、高周波電圧指令信号と高周波電流信号との外積値を算出する。これがゼロとなるように回転角度θが操作される。高周波電圧指令信号と指令電流とが直交する設定を採用する。
(もっと読む)
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】相電圧設定手段は、モータ及びインバータの少なくとも何れか一方の器差を有するパラメータに基づいた電流位相誤差範囲を含む実電流位相領域を規定し、センサレス制御にてロータ位置を検出可能な安定運転電流位相領域を規定し、実電流位相領域が安定運転電流位相領域内となるように、電流ベクトル制御により設定された電流に、回転数検出手段で検出された回転数に応じた所定の位相差を加えたものを目標電流として設定する。
(もっと読む)
DCモータ天井扇風機
【課題】起動時の回転子の位置決めをすることなく、確実にモータを所望の方向に回転させ、使用者に逆転による不安感を与えないDCモータ天井扇風機を提供する。
【解決手段】ブラシレスDCモータの回転子磁石(磁石6)の磁極位置をセンサレスで検出する位置検出手段15を備え、天井扇風機を停止させるときに、ブラシレスDCモータの特定の相に一定の時間以上通電し、前記天井扇風機の羽根の停止位置が、最終の通電相に対して常に一定になるように制御する停止位置固定手段17を備えたので、停止した状態から、通常の回転動作に移行することが可能になる。
(もっと読む)
センサレスブラシレスモータの駆動装置
【課題】三相独立方式により誘起電圧を減少させることなく検知し回転位置を高精度に検出して低回転駆動を可能にし、かつコストの増加を抑制したセンサレスブラシレスモータの駆動装置を提供する。
【解決手段】電機子巻線の三相の端子95U、95V、95Wに電源電圧Vccを供給する電源回路(インバータ回路2)と、端子の誘起電圧VSwに基づいて回転位置を検出する位置検出回路3と、回転位置に基づき通電時間帯のタイミングを制御する電源制御回路4とを備えるセンサレスブラシレスモータ9の駆動装置1であって、位置検出回路3は、いずれか一相の誘起電圧を選択して出力する切り替えスイッチ33と、いずれか一相の誘起電圧を所定の基準電圧と大小比較して比較結果を出力する比較器34と、比較結果の変化タイミングを以ってロータの基準回転位置を検出する位置検出部37と、を有する。
(もっと読む)
駆動装置
【課題】電動機を駆動するインバータでの損失の低減を図る。
【解決手段】トランジスタTr1〜Tr6よりもダイオードD1〜D6の導通抵抗が小さいインバータ24を用いるものにおいて、静電容量が可変の静電容量可変回路28a〜28cを有しモータ22とインバータ24との間でやりとりされる電力の力率であるモータ電力力率PFを調整可能な力率調整回路28を設ける。そして、静電容量調整回路28a〜28cの静電容量の調整によってモータ電力力率PFを悪化させる。これにより、インバータ24とモータ22との間で流れる電流の一周期のうちトランジスタに電流が流れる時間を短くすると共にダイオードに電流が流れる時間を長くすることができ、インバータ24での損失を低減することができる。
(もっと読む)
1 - 20 / 609
[ Back to top ]