
Fターム[5H560UA02]の内容
無整流子電動機の制御 (40,007) | 電子整流子機構の最終制御素子 (2,026) | 半導体素子 (1,954) | トランジスタ (1,852)
Fターム[5H560UA02]の下位に属するFターム
Fターム[5H560UA02]に分類される特許
1 - 20 / 474
半導体装置
モータ駆動装置
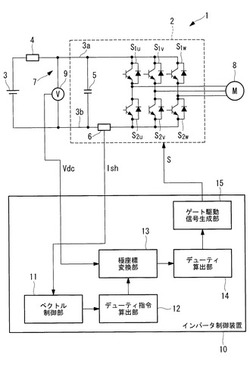
【課題】直流電源から電力供給を受けるモータ駆動装置において、1パルス制御の実行中に、直流電源に流れる電流に含まれるリップルを抑制することのできるモータ駆動装置を提供することを目的とする。
【解決手段】直流電源3から直流母線を介して入力される直流電力を三相交流電力に変換してIPMモータ8に出力するインバータ2と、電気角1周期の間に、各相に対応するスイッチング素子に対して正負1パルスの矩形波電圧をゲート駆動信号として印加する1パルス制御モードを有するインバータ制御装置10とを備え、インバータ制御装置10は、1パルス制御モードを実行する場合に、矩形波電圧の立ち上がり時および立ち下がり時において、所定の位相角幅でデューティを徐々に増加または減少させるモータ駆動装置1を提供する。
(もっと読む)
インバータ制御装置と電動圧縮機および電気機器

【課題】誘起電圧波形のゼロクロス点の検出が不可能、すなわちロータの相対位置が認識できないような運転状態となった場合に、ブラシレスDCモータの運転を継続することが不可能となって脱調停止するという課題を有していた。
【解決手段】ブラシレスDCモータ203の目標回転数に応じて、所定の周波数で通電角180度未満の波形を出力する同期転流により動作するとともに、インバータ回路部204の出力電圧に対するロータ誘起電圧位相を所定の位相に保つために、同期転流による動作においてもロータ位相の変化状態に応じて出力電圧を変化させ、過負荷時にオーバーラップ通電をする際、位相の変化に対して脱調しにくい低回転時よりオーバーラップさせることにより、モータの運転状態を追従させるようにした。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】過渡的に大きな制動電流がコイルに流れてしまうことを防ぎつつ、安全かつ速やかにモータを停止させるためのブレーキ機能を簡素かつ確実に確保すること。
【解決手段】モータ制御装置は、オン状態にされたときにモータ107の3相のコイルを短絡させ、オフ状態にされたときに3相のコイルの短絡を解消する3個のパワー素子106d〜106fと、3相のコイルのうちU相及びW相のコイルに流れる電流を検出する電流センサ120a、120bと、パワー素子106d〜106fをオン状態に制御し、電流センサ120a、120bによって検出されたU相電流及びW相電流並びに電流センサ120a、120bの検出結果に基づいて算出されたV相電流のいずれかが所定の閾値を超えた場合に、パワー素子106d〜106fを所定時間オフ状態に制御し、所定時間の経過後パワー素子106d〜106fをオン状態に制御する制御部118と、を含む。
(もっと読む)
モータ駆動装置およびモータおよびそれを搭載した空気調整機
【課題】モータ運転停止時は、制御電源からモータ駆動装置への電力供給量を低減して待機時の消費電力を抑える。
【解決手段】主電源からモータの複数相の駆動巻線へ電力供給するインバータ部と、制御電源を電力源とし、外部との信号入出力端子の一つとして前記駆動巻線への電力供給値を意味する制御信号入力端子を備え、前記インバータ部へPWM信号を前記制御信号に基づいて発生する制御部を備えたモータ駆動装置であって、
前記制御部は、前記制御信号が前記駆動巻線への電力供給値ゼロを意味している場合には、前記PWM信号発生に関る内部構成部分を機能停止するよう作用して内部消費電力を低減し、前記制御電源から制御部への電力供給量を前記内部構成部分機能動作中に比べ小さくする構成とした。
(もっと読む)
交流モータの制御装置および制御方法
【課題】電圧の位相制御を行う交流モータの動作状態における電流オフセットを検出し、電圧波形を制御することで電流オフセットを抑制、除去する交流モータの制御装置および制御方法を提供する。
【解決手段】電流検出手段97U〜97Wおよび位相検出手段95を備える交流モータ9の電流オフセット量を考慮して電圧波形を制御する交流モータの制御装置1であって、トルク指令値Treqに基づいて電圧位相θvを設定する手段12と、各相電流iu〜iwからそれぞれオフセット量IU0、IV0、IW0を検出する手段11と、電気角の半周期ごとに電圧波形をパルス幅変調波形pwmまたは矩形波形に切り替え制御するタイミングtmgを得る手段13と、オフセット量IU0、IV0、IW0の正負に応じて半周期ごとにパルス幅変調波形pwmと矩形波形に切り替える手段16と、を有する。
(もっと読む)
半導体装置及びモータ駆動装置
【課題】簡単な構成でモータの進角を適切に制御できる半導体装置を提供する。
【解決手段】一実施形態によれば、半導体装置は、制御信号生成部と、上限電圧制限部と、進角データ生成部と、を備える。前記半導体装置は、モータを駆動するモータ駆動信号の進角を制御する。前記制御信号生成部は、前記モータに流れる電流に応じた制御信号を生成する。前記上限電圧制限部は、前記制御信号の最大値を、供給された上限電圧に制限した進角制御信号を出力する。前記進角データ生成部は、前記進角を表す進角データと前記進角制御信号との関係線を生成し、前記関係線と前記進角制御信号とに基づいて前記進角データを生成する。前記関係線は、下限点から変化点を通って上限点に至る。前記変化点は、前記進角制御信号が前記上限電圧未満の変化点電圧であり、且つ、前記進角データが前記進角設定電圧に応じた進角を表す点である。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子により、モータに供給される各相の電流をより高い精度で検出できるモータ制御装置を提供する。
【解決手段】実施形態によれば、モータ制御装置は、直流を多相交流に変換する電力変換器を介してモータを駆動し、モータのロータ位置に追従するように通電パターンを生成する。通電信号生成手段は、通電制御周期内で電力変換器の直流側に接続され電流検出素子に発生する信号が少なくとも2相の電流に対応するよう通電パターンを生成し、電流検出手段は、電流検出素子に発生した信号と通電パターンとに基づき相電流を検出する。電流補正手段は検出された電流に含まれる誤差を補正し、電流制御手段は入力される電流指令値と補正された電流とに応じて通電信号生成手段が通電パターンを生成するための電流制御を行い、制御切り替え手段は、補正値演算指令を出力すると共に、前記指令の出力状態に連動して電流制御手段が電流制御を行う周期を切り替える。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子によりモータに供給される各相の電流を、発熱を抑制しつつ検出する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段は、モータの相電流に基づいてロータ位置を決定するとそのロータ位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が、電流検出素子に発生した信号とPWM信号パターンとに基づいてモータの相電流を検出する場合、PWM信号生成手段は、電流検出手段がPWM信号の搬送波周期内で固定された2点のタイミングで2相の電流を検出可能となるよう3相のPWM信号パターンを生成する。電流判定手段は、検出された3相電流の大小関係を判定し、PWM信号生成手段は、3相間のPWMデューティ比を維持した状態で、検出された3相電流のうち最大相の通電期間をゼロ又は最小とするようPWM信号パターンを補正する。
(もっと読む)
インバータ制御装置、インバータ装置、及び空気調和機
【課題】スイッチング損失を低減するとともに、制御方式の切り替えを円滑に行うことを目的とする。
【解決手段】2アーム変調方式を採用し、正弦波状の基準電圧指令信号を補正して第1電圧指令信号を生成する第1信号生成部21と、正弦波状の基準電圧指令信号にその第3次高調波成分を重畳させた波形の振幅の最大値が搬送波の振幅以上になるような過変調方式による第2電圧指令信号を生成する第2信号生成部22と、第1信号生成部21の基準電圧指令信号の振幅が、該基準電圧指令信号の最大振幅値に設定された第1閾値未満の場合に第1電圧指令信号を選択し、該基準電圧指令信号の振幅が該第1閾値と等しい場合に第2電圧指令信号を選択する選択部23と、選択部23によって選択された電圧指令信号と搬送波とを比較することによりパルス幅変調信号を生成するPWM信号生成部とを備えるインバータ制御装置を提供する。
(もっと読む)
インバータ制御装置と電動圧縮機および電気機器
【課題】PWM信号のデューティ値が小さくPWM信号がオンとなる時間が短い場合、強制的に転流を継続する強制同期転流によってモータの運転状態を維持し、インバータ出力電圧に対する誘起電圧位相の状態に応じてインバータ出力電圧を変化させることで、強制同期転流時の安定したモータ動作を実現すること。
【解決手段】出力電圧に対するロータ誘起電圧位相を所定の位相に保つ位相差判定手段210と、ブラシレスDCモータの目標回転数に応じて所定の周波数で予め設定した転流波形を出力する強制同期転流制御手段211を備え、PWM制御デューティ値が所定の値より小さくなった場合、強制同期転流により動作するとともにロータ位相の変化状態に応じて出力電圧を変化させるので安定したモータ動作を実現することができる。
(もっと読む)
モータ駆動装置
【課題】負の界磁成分電流を最適な量だけ注入することができ、これによりモータをより高い速度で駆動できるモータ駆動装置を提供する。
【解決手段】モータ制御部は、推定ロータ速度ωmが設定値以上の場合に、その推定ロータ速度ωmの上昇に伴い増加し下降に伴い減少する負の界磁成分電流Idを加えて界磁成分電流の目標値Idrefを算出するとともに、その負の界磁成分電流Idの増減率を推定ロータ速度ωmの高さに応じて可変設定する。
(もっと読む)
交流電動機の駆動装置およびそれを搭載する車両、ならびに交流電動機の制御方法
【課題】変調PWM制御および正弦波PWM制御を切換えて制御する交流電動機の駆動装置において、交流電動機の回転速度が急変した場合の緊急切換動作時におけるトルク急減を抑制する。
【解決手段】車両100は、ECU300によってPWM制御を用いてインバータ130が制御されてモータジェネレータ140を駆動することによって走行する。ECU300は、正弦波PWM制御および過変調PWM制御を含む複数の制御モードを切換えてインバータ140を制御する。ECU300は、過変調PWM制御を実行中に、駆動輪160がスリップ状態からグリップ状態に変化することに伴って電流が急増した場合に、過変調PWM制御から正弦波PWM制御に強制的に切換えるとともに、正弦波PWM制御における変調率の上限値を緩和して、正弦波PWM制御において通常時よりも大きなトルクが出力できるようにする。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、実変調度となまし変調度との間に乖離が生じても、PWM制御モードと過変調制御モードとの間の制御モード切替に際し、過大な電流が生じることを抑制することである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20を駆動する電源回路ブロック12と、電流フィードバックの制御ブロック22と、制御装置40で構成される。制御装置40は、実変調度と、なまし変調度とを求める変調度取得部42と、実変調度となまし変調度の間について予め定めた所定条件に基づいて、PWM制御モードと過変調制御モードとの間で制御モードを切り替える制御モード切替部44を含んで構成される。
(もっと読む)
インバータ制御装置およびこれを用いた電動圧縮機、並びに電気機器
【課題】 ブラシレスDCモータの運転制御を行うセンサレス型のインバータ制御装置において、ブラシレスDCモータの脱調停止を有効に抑制し、より安定で信頼性の高い運転制御を実現可能とする。
【解決手段】 インバータ制御装置20の駆動制御器231は、インバータ回路部21の出力電圧が予め設定される閾値以上であり、かつ、回転速度の検出値が目標値より小さい基準値以下である場合に、スイッチング素子の転流を、位置検出転流信号に基づく制御から強制同期転流信号に基づく制御に切り換える。また、インバータ制御装置20の出力電圧制御器232は、駆動制御器231が強制同期転流信号に基づいてスイッチング素子の転流を制御していれば、位相差検出器234による位相差に基づいて出力電圧制御信号を変化させる。
(もっと読む)
回転機の制御装置
【課題】デッドタイム付与後の実際のスイッチング状態の切替タイミングが複数のレッグ間で重なることで、サージ電圧が大きくなるおそれがあること。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータINVの出力電圧ベクトルのノルムを設定する。位相設定部26では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部34では、ノルム設定部30によって設定されたノルムVnと、位相設定部26によって設定された位相δとに基づき操作信号を生成してインバータINVに出力する。操作状態設定部34には、デッドタイム付与後における実際のスイッチング状態の切り替えが複数レッグで同時になされない波形が記憶されている。
(もっと読む)
圧縮機モータ制御システム
【課題】起動の精度を向上させることが可能な圧縮機モータ制御システムを提供する。
【解決手段】圧縮機モータ制御システムは、多相モータを有する圧縮機と、多相交流電圧により前記多相モータを制御する制御装置とを含む。制御装置は、多相モータの起動の失敗の有無を検知し、多相モータの起動の失敗を検知した場合には、次に起動する際の電圧をある範囲内で大小交互に変化させる。
(もっと読む)
駆動装置および電動車両
【課題】パルス幅変調制御によるインバータの制御から矩形波制御によるインバータの制御への切替時にインバータの制御性が低下するのを抑制する。
【解決手段】インバータをPWM制御によって制御するか矩形波制御によって制御するかに拘わらず、電圧位相指令θs*の今回値と前回値との差分としての電圧位相指令変化量Δθsが変化許容値θslim以下となるよう電圧位相指令θ*を設定し(S330〜S430)、設定した電圧位相指令θs*を用いて次の切替電気角θswやスイッチングパターンを設定する(S440,S450)。
(もっと読む)
ブラシレスDCモータの制御回路の調整装置、調整方法、調整プログラム、及びブラシレスDCモータの制御回路
【課題】ブラシレスDCモータの回転数のばらつきを抑制するブラシレスDCモータの制御回路の調整装置、調整方法、調整プログラム、及びブラシレスDCモータの制御回路を提供することを課題とする。
【解決手段】ブラシレスDCモータ5の制御回路16の調整装置22であって、前記ブラシレスDCモータ5のロータ19を所定の電気角にした際の回転角センサ20の出力値をブラシレスDCモータ5の極対数分取得し、取得した出力値の平均値を、制御回路16が前記回転角センサ20の信号に基づいてブラシレスDCモータ5に給電する電流の位相を調整するオフセット値として制御回路16に設定する処理部23を備える。
(もっと読む)
モータ駆動装置
【課題】 モータ角度検出器に故障が生じても、モータロータの磁極位置に応じた制御が行えて、モータ駆動が行えるモータ駆動装置を提供する。
【解決手段】 車輪駆動用のモータ6につき、モータ角度検出器36の角度検出値に従い、磁極位置に応じた制御をする基本駆動制御部38を備えたモータ駆動装置20に適用する。車輪回転数検出器24の検出値からモータロータの角度を推測する車輪速度対応モータ角度推測手段46と、センサレス角度検出手段50を設ける。モータ角度検出器36が故障と判別した場合に、基本駆動制御部38による制御を、車輪速度対応モータ角度推測手段46の出力を用いて行わせるセンサ切替え手段49を設ける。車輪回転数検出器24が故障の場合、センサレス角度検出手段50を用いる。
(もっと読む)
1 - 20 / 474
[ Back to top ]