
Fターム[5H571LL01]の内容
Fターム[5H571LL01]の下位に属するFターム
アナログ値で検出するもの (15)
デジタル値で検出するもの (89)
速度検出器を用いないで検出するもの (84)
速度検出手段を複数設けるもの (4)
Fターム[5H571LL01]に分類される特許
1 - 20 / 36
電動パワーステアリング装置
【課題】電動モータの電気的抵抗が精度良く推定することが可能となる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、電動モータ20の電気的抵抗の推定値に基づいて同電動モータ20の回転速度を算出する。そして、舵角センサ54の出力が舵角一定条件を満たすとき、かつ、電動モータ20の誘起電圧が誘起電圧一定条件を満たすとき、電動モータ20の電気的抵抗の推定値を推定して更新する。
(もっと読む)
モータ駆動制御装置及びモータ駆動制御方法

【課題】所定ビットのパルス幅変調によってファンモータを制御する場合において、該所定ビットを超えた分解能によってファンモータを制御する、ことを目的とする。
【解決手段】モータ駆動制御装置10は、回転数検出部20によってファンモータ14の回転数を検出し、制御値算出部30によって検出値とファンモータ14の回転数の目標値との偏差に基づいたファンモータ14に対する制御値を、8ビットの定倍で算出する。そして、モータ駆動制御装置10は、除算部32によって、算出した制御値を定倍の値で除算し、商と余りを算出し、パルス出力部34によって、商に応じたデューティー値のパルスを第1パルスとし、余りに応じたデューティー値のパルスを第2パルスとし、第1パルスと第2パルスとの数を余りに基づいて変化させた、該第1パルスと該第2パルスとの組み合わせを1組として出力する。
(もっと読む)
可動装置
【課題】可動体の複数の可動形態のうちの少なくとも一つの可動形態の認識を、DCモータが発生する可聴音で行うことができる可動装置を提供する。
【解決手段】可動装置は、可動体1と、駆動に伴い可動体1を複数の可動形態で可動させるDCモータ20で形成されたDCモータ20をもつ駆動部2と、DCモータ20をPWM制御させて駆動電流を発生させると共にPWM周波数を変更可能な制御部3とを有する。制御部3は、可動体1のうちの少なくとも一つの可動形態において、DCモータ20に給電される駆動電流のPWM周波数を他の可動形態に対して変更させることにより、DCモータ20が発生する可聴音の物理量を変更させる。
(もっと読む)
モータ駆動装置
【課題】接点数が少なく接点容量の小さな操作スイッチを用いて、浸水時のモータ誤動作を防止する。
【解決手段】正転用リレー2aと、逆転用リレー2bと、正転用リレー2aを駆動するトランジスタQ4と、逆転用リレー2bを駆動するトランジスタQ7と、トランジスタQ4を駆動するトランジスタQ3と、トランジスタQ7を駆動するトランジスタQ6と、モータ13を正転させるためのUPスイッチ5と、モータ13を逆転させるためのDOWNスイッチ4と、UPスイッチ5から正転指令信号が入力されたときに、トランジスタQ3をオン状態にする信号を出力し、DOWNスイッチ4から逆転指令信号が入力されたときに、トランジスタQ6をオン状態にする信号を出力するCPU11と、浸水を検知する浸水検知回路17とを設け、浸水検知時にトランジスタQ3、Q6をオフ状態にする。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングの操舵状態の判定結果について誤りが生じる頻度を少なくすることのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、操舵系にアシスト力を付与するモータの電流(モータ電流Im)と、ステアリングの操舵速度ωsとに基づいて、ステアリングの操舵状態を判定する。すなわち、ステアリングが中立位置以外の位置で保持されている状態を保舵状態とし、ステアリングが中立位置にある状態を中立状態とし、操舵速度ωsが判定値ωaよりも小さく、かつモータ電流Imが基準値Ixよりも大きいとき、ステアリングの操舵状態が中立状態か否かを判定する。そして、操舵速度ωsが判定値ωaよりも小さく、かつモータ電流Imが基準値Ixよりも大きく、かつ前回判定時にステアリングの操舵状態が中立状態にある旨判定しているとき、ステアリングの操舵状態が中立状態にある旨判定する。
(もっと読む)
電源装置
【課題】電源装置において、負荷駆動をPWMによるDUTY制御で行なう時、低DUTY制御においては、間欠運転に近くなるため、負荷のうなりによる騒音の問題が生じていた。また、電源に対する負荷ストレスが大きくなると同時に、ノイズに対する影響も大きくなるためにコイルなどのノイズ軽減の部品が必要となる、余分な設計工数が増えるなどの個々の課題を有していた。
【解決手段】負荷駆動でのPWM制御における電圧値を2つ以上の電圧間で制御し、HI、LOの電位差を小さくすることによってファンモータなどの電圧変動に応じて生じるうなりなどの騒音を軽減させ、同時に電源に対する負荷ストレスも軽減させることにより、ノイズの影響を小さくし、ノイズ対策を安易化する。
(もっと読む)
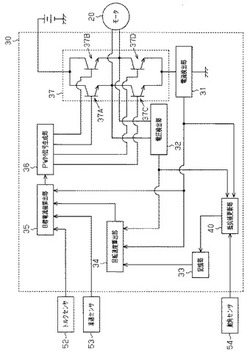
モータ制御装置
【課題】容易且つ確実にトルク振動を半減以下にすることが可能となるモータ制御装置を提供する。
【解決手段】モータ制御装置10は、駆動電圧Vの印加に基づいてブラシ付き直流モータMを回転駆動させる。モータ制御装置10は、直流モータMの回転角度毎のトルク振動を相殺する補償トルクを生じさせるための補正値データZを、1回転につき(低減したい)トルク振動の次数に8以上の4の倍数を掛け算した回数発生させ、順次、補正値データZに基づいて駆動電圧Vを生成する。
(もっと読む)
アンバランス状態を定量的に検出する方法および装置と工作物のクランプ状態を検出する方法
【課題】回転シャフトのアンバランス量の値およびアンバランス角の値を検出することにより、回転シャフトのアンバランス状態を定量的に検出する方法を提供する。
【解決手段】回転シャフトの回転運動エネルギーおよび位置エネルギーにしたがって、回転シャフトのアンバランス量変数とアンバランス角変数とを含むラグランジュ運動学方程式を確定し、位置信号と速度信号と加速度信号とトルク信号とにしたがって、非線形多変数法により方程式を解くことにより、回転シャフトのアンバランス量の値とアンバランス角の値とを獲得する段階と、を包含し、回転シャフトのアンバランス量が、回転シャフトの重心から回転シャフトの軸までの垂直線分の長さと回転シャフトの質量との積であり、該回転シャフトのアンバランス角が、回転シャフトの重心から回転シャフトの軸までの垂直線分と回転シャフトの水平軸面との間の挟角である。
(もっと読む)
モータ駆動装置、駆動方法およびそれを用いた冷却装置
【課題】モータを所望のトルクで駆動する。
【解決手段】第1キャパシタC1は一端の電位が固定される。充放電回路20は、モータの回転数を指示する入力信号S1に応じた電流Ictによって第1キャパシタC1を充放電する。第1コンパレータCMP1は、第1キャパシタC1の電圧Vctを所定のしきい値電圧Vthと比較する。制御信号生成部30は、モータの回転と同期した周期信号FGのエッジと、第1コンパレータCMP1から出力される比較信号S2のエッジのタイミングに応じたレベルを有する制御電圧Vcontを生成する。さらに制御信号生成部30は、充放電回路20の充放電状態を周期信号FGと比較信号S2のエッジにもとづいて切りかえる。モータは、制御電圧Vcontに応じたトルクで駆動される。
(もっと読む)
モータ制御装置
【課題】より一層の低騒音化を図ることができるモータ制御装置を提供する。
【解決手段】制御装置10は、駆動回路11(スイッチング素子Tr)のPWM制御の際のデューティの変更に基づいて、モータMの無負荷回転状態での回転角毎のトルク変動を相殺する補償トルクを生じさせる補償電圧を直流電圧に加重して駆動電圧Vを生成し、この駆動電圧Vの印加に基づいて直流モータMを回転駆動させる。
(もっと読む)
電動ファンの制御装置
【課題】回転数が低い場合であっても振動、異音の発生を低減することが可能な電動ファンの制御装置を提供する。
【解決手段】実回転数が、所定の閾値回転数以上であるか、或いは閾値回転数未満であるかを判定する回転数判定部13を有し、この回転数判定部13にて、実回転数が閾値回転数以上であると判定した場合には、PWM信号を第1の周波数f1に設定する。また、実回転数が閾値回転数未満であると判定した場合には、PWM信号を前記第1の周波数よりも高い第2の周波数f2に設定する。そして、設定された周波数、及び設定された回転数に応じたデューティ比となるPWM信号を生成し、このPWM信号で電子スイッチを制御する。その結果、低い回転数に設定した場合でも、ノイズの発生を低減することができる。
(もっと読む)
モータ制御装置
【課題】 モータ等の装置の耐久性を向上できるとともに、モータ駆動の応答性を確保できるモータ制御装置を提供すること。
【解決手段】 ブラシ付のモータMと、モータMを駆動するスイッチング素子SW(駆動素子)と、モータMの回転状態を目標デューティ比D*に基づき制御するコントロールユニットCUと、を備え、コントロールユニットCUは、モータ停止状態から回転制御を開始する際に、出力するデューティ比Dを所定時間Δtだけ目標デューティ比D*以上(初期デューティ比D0)とし、その後、所定値Nとした後、目標デューティ比D*に一致させることとした。
(もっと読む)
開閉装置
【課題】開閉体の位置情報に頼ることなく駆動モータの高速用ブラシと低速用ブラシとを切り替えることができる開閉装置を提供する。
【解決手段】回転センサ27は、スライドモータ26に加わる負荷に応じた回転検出信号を出力する。制御回路装置71は、回転検出信号に基づいて、スライドモータ26に加わる負荷が所定の基準値よりも小さい場合にはコモンブラシ26a及び高速用ブラシ26cを介してスライドモータ26に駆動電源を供給し、スライドモータ26に加わる負荷が所定の基準値よりも大きい場合にはコモンブラシ26a及び低速用ブラシ26bを介してスライドモータ26に駆動電源を供給する。
(もっと読む)
サーボ制御方法、サーボ制御装置
【課題】制御対象に摩擦が存在する場合におけるサーボ制御の高応答化を図る。
【解決手段】積分器を持たないバックステッピング制御系を用いてサーボ制御を行うこととした。これにより、積分器に由来するオーバーシュート及びアンダーシュートの反復の問題を解消することができ、サーボ制御の高応答化が実現する。
(もっと読む)
ディスク装置
【課題】ディスク装置において、ドライバICに過電流が流れたことを的確に検出してドライバICが過熱することを防止する。
【解決手段】ディスク装置1は、ディスク2を回転させるスピンドルモータ3と、スピンドルモータ3に駆動電圧を供給するドライバIC6と、ドライバIC6にスピンドルモータ3への駆動電圧の供給を指示する制御部7と、ドライバIC6に電源を供給する電源回路8を備える。制御部7は、電源回路8からドライバIC6に供給される電圧Vaと、電源回路8が生成する基準電圧Vsとを比較し、電圧Vaが基準電圧Vsよりも低下したときに電圧低下信号bを出力する外付けの差動アンプ12を備える。制御部7は、スピンドルモータ3にショートが発生してドライバIC6に過電流が生じたとき差動アンプ12から出力される電圧低下信号bに基づいて故障の発生を判定し、ドライバIC6からスピンドルモータ3へ供給する駆動電圧を停止させる。
(もっと読む)
直流モータのリプル検出装置、モータ回転位置検出装置及びリプル検出方法
【課題】直流モータの電流リプルを高精度に検出する。
【解決手段】フィルタ13は、遮断周波数fc1が可変のLPFと遮断周波数fc2が可変のHPFとを備える。モータ電流の回転検出信号に高調波ノイズが含まれていると、リプル判定器22は、電流リプルを連続して判別できないので、連続判定器23は、連続検出判定信号S2の出力を停止する。制御部16は、遮断周波数fc1を下げるようにLPFを制御して、回転検出信号から高調波ノイズを除去する。高調波ノイズが除去されると、連続判定器23は連続検出判定信号S2を出力し、制御部16は、遮断周波数fc2を上げるようにHPFを制御して、回転検出信号からブラシ火花に起因するノイズを除去する。
(もっと読む)
モータコントローラの診断方法
【課題】本発明は、簡単な構成でどのようなモータにも適用することができ、かつ、モータコントローラの信頼性のある故障診断を行えるモータコントローラを提供することを目的とする。
【解決手段】本発明のモータコントローラは、モータ1によって駆動される回転体5と、該回転体5の回転角度を検知するセンサ部6,8と、該モータ1を駆動する駆動回路と、該センサ部6,8の出力信号に基づき該駆動回路に対する指令信号を算出するモータ制御部16と、を有する。診断手段15は前記センサ部6,8が検知する回転体5の回転角度と前記モータ制御部16からの駆動回路に対する指令信号とに基づきモータコントローラの故障診断を行う。
(もっと読む)
回転体制御装置及びこれを備える洗濯機
【課題】複数の転動体が収容されたバランシング手段を備えた回転体において、複数の転動体同士の衝突音の発生を抑制することができる回転体制御装置及びこれを備えた洗濯機を提供する。
【解決手段】回転軸を中心に回転自在に取り付けられた回転体の回転動作を制御する回転体制御装置において、前記回転体と一体にかつ当該回転体の回転軸と同心に設けられた環状形状でなるレースと、当該レースの内部で移動自在に収容された複数の転動体とを有するバランシング手段40と、前記レースの内部に収容された前記転動体の周方向位置を検知する位置検知手段43と、位置検知手段43により検知された前記転動体の周方向位置に基いて前記回転体の回転動作を制御する制御手段32と、を備えることを特徴とする。
(もっと読む)
ディスク装置
【課題】ディスクを回転させるモータのショートの有無を適切に検出することが可能なディスク装置を提供する。
【解決手段】制御部4は、立ち上げ時のディスク200の停止時にオフセット電圧の供給を指示する。差動オペアンプ12は、立ち上げ時のディスクの停止時に、第1の電圧供給線SP+の電圧と第2の電圧供給線SP−の電圧の差を検出する。故障判定部15は、差動オペアンプ12が出力する電圧の差の絶対値が所定の閾値以下のときに、スピンドルモータ1がショートしていると判定する。
(もっと読む)
ブラシ付モータのための制御装置
【課題】ブラシ付モータMにおいて、昇圧回路を用いることなく、高回転で高トルクの運転を実現すること。
【解決手段】ブラシ変位機構を含むブラシ付モータのための制御装置であって、ブラシ付モータMのロータ軸15の回転速度を検出するための回転速度センサ16を有する。回転速度センサ16の出力信号は、コントローラ10へ与えられる。コントローラ10は、回転速度センサ16により検出されたモータMのロータ軸15の回転速度に応じて、モータMのブラシの位置を調整する。
【効果】ブラシの位置を変化させることで、モータMのトルク定数を変化させ、昇圧回路を用いることなく、高回転領域での高トルクが得られる。
(もっと読む)
1 - 20 / 36
[ Back to top ]