
Fターム[5H572LL29]の内容
Fターム[5H572LL29]に分類される特許
1 - 20 / 33
駆動装置
【課題】 同一方向への回転途中に負荷の要求N−T特性が変動する駆動装置において、モータ出力を低減する。
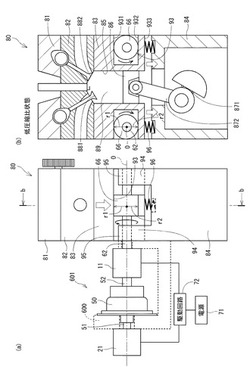
【解決手段】 可変圧縮比エンジン80の偏芯カム66の負荷回転軸62を回転駆動する駆動装置601は、第1モータ11、第2モータ21およびダイオード式クラッチ50から構成される。第1モータ11のN−T特性は、第2モータ21の特性に対し低トルク高回転側に設定される。偏芯カム66の回転中、要求特性が低トルク高回転のときは第2モータ21が空転し、第1モータ11によって負荷回転軸62を回転駆動する。要求特性が高トルク低回転のときは第2モータ21の回転力が第1モータ11に伝達され、合成回転力によって負荷回転軸62を回転駆動する。これにより、駆動装置601のN−T特性を略反比例形の負荷要求特性に効率的に相応させることができるので、モータ出力を低減することができる。
(もっと読む)
グラインダー用駆動装置及びそれを備えたグラインダー

【課題】簡単な手段によって安全性を高めたグラインダー用安全装置を提供する。
【解決手段】グラインダー用駆動装置8は次の特徴の内の1つ又は複数を有する:駆動手段は少なくとも3つの駆動装置を有すること;安全手段は、各駆動アセンブリ12の故障を検出するための故障検出手段28と、この故障検出手段28によって検出される故障に応答して全ての電動機14のスタートを妨げるに適した制御手段22を有すること;この故障検出手段28は、各減速手段16に1つの減速装置故障センサ34を有すること;少なくとも2つの駆動アセンブリ12、及び好ましくは全ての駆動アセンブリ12は同一であること;
(もっと読む)
モータ制御装置
【課題】電力計等の専用の測定機器を用いることなしに、正確に消費電力の計測を可能にする抵抗回生方式のモータ制御装置を得ること。
【解決手段】抵抗回生方式のモータ制御装置において、モータに流れる電流に基づき該モータに発生するトルクもしくは推力を算出するトルク・推力算出部と、前記モータに流れる電流とモータ速度との一方または両方に基づき損失Lを算出し、前記モータ速度と前記トルク・推力算出部が算出したトルクもしくは推力との積から出力Wを算出し、瞬時電力Pを、損失Lと出力Wとの和L+Wが、L+W≧0のときはP=L+Wと算出し、L+W<0のときはP=0と算出する電力算出部とを備えた。
(もっと読む)
モータ駆動力伝達装置
【課題】長時間にわたる連続運転による電動モータの過度な発熱を抑制して連続して使用することができるモータ駆動力伝達装置を提供する。
【解決手段】モータ駆動力伝達装置1は、モータ駆動力をリヤディファレンシャル107に伝達する減速伝達機構2と、減速伝達機構2を介してリヤディファレンシャル107に連結され、第1のモータ駆動力aを発生させる第1の電動モータ3と、第1の電動モータ3及び減速伝達機構2に連結され、第2のモータ駆動力bを発生させる第2の電動モータ4と、リヤディファレンシャル107に対する駆動トルクが所定のトルク以上のトルクを要する場合に第1の電動モータ3及び第2の電動モータ4を共に駆動する制御信号を、また駆動トルクが所定のトルク未満のトルクを要する場合に第1の電動モータ3及び第2の電動モータ4を交互に駆動する制御信号をそれぞれ出力するECU5とを備えた。
(もっと読む)
電力変換装置
【課題】コンデンサのリップル電流を低減しつつ、スイッチング素子間の熱損失の偏りを低減する電力変換装置を提供する。
【解決手段】電力変換装置1は、第1インバータ部20および第2インバータ部30と、コンデンサ50と、マイコン51と、を備える。マイコン51は、第1デューティ中心値Dc1が出力中心値Rcよりも下側にシフトされ、第2デューティ中心値Dc2が出力中心値Rcよりも上側にシフトされる第1状態と、第1デューティ中心値Dc1が出力中心値Rcよりも上側にシフトされ、第2デューティ中心値Dc2が出力中心値Rcよりも下側にシフトされる第2状態と、をステアリングホイール91の操舵状態に応じて切り替える。これにより、コンデンサ50のリップル電流を低減しつつ、MOS21〜26、31〜36間の熱損失の偏りを低減することができる。
(もっと読む)
車両用操舵装置
【課題】1つの駆動回路によって、電動パワーステアリング用モータとロック制御用モータとを駆動することが可能となる車両用操舵装置を提供する。
【解決手段】EPS用モータ6と駆動回路12とを接続するための給電経路には、当該給電経路を開閉するためのEPS用リレー18A,18Bが設けられている。ロックモータ10と駆動回路12とを接続するための給電経路には、当該給電経路を開閉するためのリレーR1,R3,R5が設けられている。これらのリレー18A,18B,R1,R3,R5と駆動回路12とは、制御部13によって制御される。
(もっと読む)
モータ制御システム
【課題】1つの外部位置検出器からの位置情報により、複数のモータ動作を制御可能とするモータ制御システムを提供する。
【解決手段】モータ駆動装置A12aは、外部位置検出器19aから位置情報を取り込む外部位置検出器接続手段16aと、取り込んだ位置情報を他のモータ駆動装置12に送信し、位置指令を前期上位制御装置11から受信するシリアル通信手段13aと、前記位置指令と前記位置情報との差が無くなるようにモータ動作を制御するモータ制御手段18aを備え、モータ駆動装置B12bは、前記モータ駆動装置A12aから送信された位置情報を受信し、さらに位置指令を前期上位制御装置11から受信するシリアル通信手段13bと、前記位置指令と前記位置情報との差が無くなるようにモータ動作を制御するモータ制御手段18bを備え、1つの外部位置検出器からの位置情報により、複数のモータ動作を制御する。
(もっと読む)
電動車両
【課題】 電動車両において、インバータのスイッチング素子の温度上昇を抑制する。
【解決手段】 フロント側駆動輪またはリア側駆動輪にトルクが出力されており、かつ、車速Vがゼロ近傍である場合には、フロント側駆動輪を駆動する同期電動機の出力トルクをリア側駆動輪を駆動する誘導電動機の出力トルクよりも小さくし、フロント側駆動輪またはリア側駆動輪にトルクが出力されており、かつ、各駆動輪に出力されたトルクによって車両が移動しようとする方向と逆方向に車両が所定の速度V2で移動している場合には、同期電動機の出力トルクを誘導電動機の出力トルクよりも大きくする出力トルク変更手段を備える。
(もっと読む)
電気車制御装置
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更を不要とし、電力変換回路の数を抑制して車体の振動乗り心地を改善する。
【解決手段】車体が搭載される2台の台車のうち,前方の台車の前方の車輪を駆動する電動機と後方の台車の前方の台車を駆動する電動機とが並列接続され,前方の台車の後方の車輪を駆動する電動機と後方の台車の後方の車輪を駆動する電動機とが並列接続され,2組の並列接続した電動機の組み合わせに対し逆方向の振動トルクが重畳するように制御することにより電動機のトルク変動を用いて2台の台車に同一の上下力を発生させてそれぞれの台車の上下振動を抑制することにより車体が前後線対称形状に弾性変形する振動を間接的に抑制することを特徴とする電気車制御装置。
(もっと読む)
建設機械の駆動制御装置及び駆動制御方法
【課題】建設機械の作業状態に応じて一方側の車輪に伝達する他方の車輪の駆動力を調整すること。
【解決手段】建設機械1は、前輪2a,2b及び後輪2c,2dの駆動軸にそれぞれ連結され、前輪2a,2b及び後輪2c,2dを回転駆動する電動モータ3a,3b及び電動モータ3c,3dと、後輪2c,2dの駆動軸に連結され、後輪2c,2dの回転に合わせて駆動される油圧ポンプ7a,7bと、前輪2a,2bの駆動軸に連結され、油圧ポンプ7a,7bから供給される圧油によって前輪2a,2bを回転駆動する油圧モータ5a,5bを備える。コントローラ14は、建設機械1の作業状態に応じて、電動モータ3a〜3dの駆動力を制御すると共に、油圧ポンプ7a,7bから油圧モータ5a,5bに伝達されるトルクを制御することにより、前輪2a,2bに発生する駆動力を調整する。
(もっと読む)
機械を駆動するサーボシステムの消費電力計算機能を有するサーボシステム選定装置
【課題】機械を駆動する複数のモータを駆動するモータ駆動装置を備えたサーボシステムの消費電力計算機能を有するサーボシステム選定装置を提供。
【解決手段】機械に使用されるモータと駆動アンプを備えたサーボシステムの選定を行うサーボシステム選定装置において、機械情報10、機械運転情報12、および選定対象となる少なくとも1つのサーボシステムのサーボシステム情報14を入力する入力部16と、入力部16に入力された機械運転情報12に基づいてサーボシステムの消費電力を機械情報10およびサーボシステム情報14を用いて、入力部16に入力されたサーボシステム毎に全消費電力量、全損失、あるいは電力効率の少なくとも一つを計算する演算部18と、演算部18により計算した全消費電力量、全損失、あるいは電力効率の少なくとも一つを入力部16に入力されたサーボシステム毎に表示または出力する第1の出力部20と、を備えた。
(もっと読む)
電気車駆動システム
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、車体の振動乗り心地を改善する手法が必要である。また、電動台車で容易に実現できる手法が望ましい。
【解決手段】車輪を有する台車の上に車体が搭載された電気車であり、台車に装荷された電動機が歯車を内蔵した駆動装置を介して車輪を駆動することにより走行する電気車両において、電動機のトルクにより車体の振動抑制制御を行う。また、台車振動を電動機の回転速度から演算した情報をもとに電動機のトルクにより台車振動を抑制し、間接的に車体の振動の抑制を行う。
(もっと読む)
ロボット関節のための統合高速トルク制御システム
【課題】ロボットの関節の制御システムであって、高速トルクを達成し、かつノイズに強い制御システムを提供する。
【解決手段】並置関節プロセッサ及び高速通信バスを有する印刷回路基板アセンブリ(PCBA)30を含んでいる。PCBAは、また、パワーインバータモジュール(PIM)34と、1つ以上のモータ位置センサからのセンサデータを処理するためのセンサ調整電子素子(SCE)36とを含んでいる。関節のモータのトルク制御は、高速トルクループとしてPCBAにより提供される。各関節プロセッサは、制御されるべきロボット関節内に組み込まれるか、又はそれに並置されている。関節プロセッサ、PIM、及び高速バスの並置により、制御システムの雑音イミュニティが増し、関節モータ40からのセンサデータの関節レベルの局所的処理により、各制御ノードに対する往復のバスケーブルを最短にすることができる。
(もっと読む)
モータ制御装置
【課題】複数のモータを駆動する場合でもモータに発生する振動を低減できるモータ制御装置を提供する。
【解決手段】モータ制御装置のコントローラは、双方のモータの回転角のずれ量が0度であって回転数が50rpmの場合には(ステップSA4でYES)、少なくとも一方のモータの駆動電流を制御してモータの回転速度を調整することにより、回転角のずれ量を180度に補正する。また、コントローラは、双方のモータの回転角のずれ量が180度であって回転数が25rpmの場合には(ステップSA7でYES)、少なくとも一方のモータの駆動電流を制御してモータの回転速度を調整することにより、回転角のずれ量を0度に補正する。
(もっと読む)
独立車輪駆動電動車の制御装置
【課題】駆動輪を駆動する永久磁石式同期電動機の永久磁石が減磁している場合にも、左右車輪トルクのアンバランスを適切に是正して安定した駆動を行うことができるようにする。
【解決手段】電流指令値演算部11の機能構成として減磁判定ブロック22と減磁時の電流指令値演算ブロック25とを設け、第1のモータ1の磁石磁束推定値ψa1と第2のモータ2の磁石磁束推定値ψa2とに基づいて、減磁判定ブロック22にて第1のモータ1と第2のモータ2のいずれかが減磁状態となっているか否かを判定する。そして、いずれかのモータが減磁状態となっていれば、減磁時の電流指令値演算ブロック25において、減磁状態となっているモータで実現可能なトルク範囲内で各モータの出力トルクが一致するように、各モータ1,2に対する電流指令値を各々算出する。
(もっと読む)
作業車両の車軸駆動装置
【課題】芝刈機等の作業車両では、車軸駆動装置に複数の電動発電機を備える場合、軸構造が複雑となって組立性等が低下したり、走行負荷が大きいと高トルク低回転数域での発進時のトルク不足等のために良好な走行性能が得られない、という問題があった。
【解決手段】電動発電機は第一電動発電機24と第二電動発電機25より構成し、該第一電動発電機24と第二電動発電機25は単一の共通ロータ軸41を備えると共に、該共通ロータ軸41のロータ24b・25bに対して、前記第一電動発電機24の第一ステータ24aと第二電動発電機25の第二ステータ25aを前記コントローラ20により独立制御可能に対向配置し、該第二ステータ25aの稼働状態を切り替えることによって、第一電動発電機24からのトルクに第二電動発電機25からのトルクを加算した出力トルクTを、走行負荷Lの大きさに応じて変更可能としたトルク制御構成を有する。
(もっと読む)
駆動装置
【課題】低出力駆動時と高回転駆動時においてエネルギ効率を向上させる。
【解決手段】2台のモータ11,12をそれぞれ異なる入力軸に連結し、2台のモータ11,12のトルクを合成して出力軸17から出力する動力伝達機構13を備え、2台のモータ11,12の内の一方を出力軸と同一の回転方向に、他方を出力軸と異なる回転方向にそれぞれ力行運転する第1の駆動モードを有する。
(もっと読む)
輪転印刷機および輪転印刷機の停電制御方法
【課題】装置構成をコンパクトにすると共に装置コストを抑制し、ウェブを好適に搬送停止させることが可能な輪転印刷機等を提供する。
【解決手段】複数の駆動モータ20,28,30,38,40,45の回転に連動する複数の印刷胴をそれぞれ回転させて、ウェブWを搬送しながら印刷を行う印刷装置Uと、印刷装置UによるウェブWの搬送速度を制御可能な制御装置25,29,35,39,43,47,50,51と、を備えた輪転印刷機10において、制御装置は、速度レートを出力可能な通信部Pと、出力された速度レートに基づいて各駆動モータを制御可能な複数のモータドライバ25,29,35,39,43,47と、を有し、通信部Pは、停電発生直後において停電用減速レートA2を出力し、停電中における各駆動モータの回生動作の開始後において停電用減速レートA2に比して小さい減速率となる停電用補正減速レートA3を出力する。
(もっと読む)
リニアアクチュエータの同期制御装置と方法
【課題】4本以上のリニアアクチュエータにより剛体の3次元位置を制御することができ、各リニアアクチュエータに過負荷検出手段を取り付けることなく、作動時及び静止時の両方において、各リニアアクチュエータの過負荷を防止できるリニアアクチュエータの同期制御装置と方法を提供する。
【解決手段】単一の剛体1に同一直線上に位置しない3点b,c,dで連結されかつ互いに平行な駆動軸B,C,Dを有し、駆動軸の軸方向位置を制御し推力Fb,Fc,Fdを検出可能な3本の位置制御リニアアクチュエータ10と、剛体1に連結されかつ駆動軸B,C,Dと平行な推力軸Aを有し、推力軸Aの軸方向推力Faを制御可能な1本以上の推力制御リニアアクチュエータ20と、3本の位置制御リニアアクチュエータ10の推力Fb,Fc,Fdから推力制御リニアアクチュエータ20の推力を設定する推力設定装置30とを備える。位置制御リニアアクチュエータ10と推力制御リニアアクチュエータ20により剛体1の3次元位置を制御する。
(もっと読む)
電気車制御方法及び電気車制御装置
【課題】リアルタイムに変化する軸重移動量を動的に考慮したトルク制御の実現。
【解決手段】トルク指令演算器200から出力されるトルクパタン指令τen*は、動的軸重移動補償制御器700による動的軸重移動補償指令τe_det*と、再粘着制御器400による再粘着指令τe_re*との分だけ引き下げられたインバータトルク指令τen_in*として、ベクトル制御演算器30に入力される。軸重移動演算器600は、トルク指令演算器200から出力されるトルクパタン指令τen*と、ベクトル制御装置30に入力されるインバータトルク指令τen_in*との差Δτe*から、各軸の軸重移動量ΔWnの変動ΔVnを算出する。そして、トルク指令演算器200は、各軸の軸重を軸重変動ΔVnで補正して、トルクパタン指令τen*を算出する。
(もっと読む)
1 - 20 / 33
[ Back to top ]