
Fターム[5H607GG20]の内容
電動機、発電機と機械的装置等との結合 (43,013) | 軸受 (4,226) | 磁気軸受 (198) | 電機界磁の一部を利用するもの (19)
Fターム[5H607GG20]に分類される特許
1 - 19 / 19
ローレンツモータ
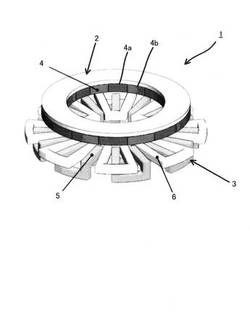
【課題】ロータとステータとの傾きと位置を制御する傾き・位置制御機構を小型化することが可能なローレンツモータを提供する。
【解決手段】ステータとロータとを対向配置し、ステータとロータとの間に作用するローレンツ力によってロータがステータに対して回転するよう構成されたローレンツモータにおいて、ロータは、ステータとの対向面に多極着磁したロータマグネットを有し、ステータは、交番電流を流されることによってロータを回転させるローレンツ力を生じさせる回転用巻線と、交番電流を流されることによってロータとステータとの傾きと位置を制御するローレンツ力を生じさせる傾き・位置制御用巻線とを有し、傾き・位置制御用巻線は、ロータに多極着磁した所定の磁極と、所定の磁極と隣接する異なる極の磁極との境界における多極着磁した面と平行な向きの磁束と作用して傾き・位置制御用のローレンツ力を生じる。
(もっと読む)
ベアリングレスモータ

【課題】駆動回路を含めた装置の小型化及び低消費電力化を図ることが可能なベアリングレスモータを提供する。
【解決手段】このベアリングレスモータ1は、互いに平行な平坦面7A,7Bが形成された2つの回転板6A,6Bが、平坦面7A,7Bに垂直な軸方向に沿って延在する連結軸5によって連結されて成る回転子4と、2つの回転板6A,6Bの平坦面7A,7B上において、周縁部に沿って複数配列された永久磁石9,10と、回転板6Aの平坦面7Aに対面するように設けられた磁性材料を含む固定子2と、回転板6Bの平坦面7Bに対面するように設けられた磁性材料を含む固定子3と、固定子3に対して永久磁石9,10の配列方向に複数分割して巻き付けられ、回転板6Bの平坦面7Bに向けて磁界を発生させるコイル15とを備える。
(もっと読む)
スラスト力発生装置及び該スラスト力発生装置を適用した電磁機械
【課題】組み立て作業が簡単であり、部品点数の低減及び主軸長の短縮化を図ったスラスト力発生装置及び該スラスト力発生装置を適用した電磁機械を提供する。
【解決手段】永久磁石13の径方向寸法は、ベアリングレスモータ40、50の可動子4、6、及びセンサターゲット2、8と同じにすることで、回転体形状を凸型から円筒型に改良した。また、永久磁石13の外周部分をセンサターゲットとすることで、ベアリングレス回転機の軸長短縮化を可能にした。更に、主軸1の下側に永久磁石19、もしくは強磁性体を設置し、スラスト力発生の付加機構を設けることで、低消費電力化を可能にした。
(もっと読む)
モータ一体型の磁気軸受装置
【課題】 モータロータの発熱抑制・モータ効率向上が可能で、コイル電流印加タイミングの誤動作によるコイルの焼損を防止できるモータ一体型の磁気軸受装置を提供する。
【解決手段】 転がり軸受15,16でラジアル負荷を支持し、主軸13のスラスト板13a,13bに対向する磁気軸受でアキシアル負荷・軸受予圧を支持する。モータ28は、主軸13に設けられ位相検出器40で位相が検出されるロータ28と、これに対向するステータ28bと、電気角30°毎に切り替わる12パターンのタイミング信号を生成する演算部38と、タイミング信号に従ってステータ28bの各相コイル28baに電流を印加するパワー回路39とを備える。演算部38は、位相検出器40の出力に誤信号が有ると異常と判定する異常判定手段41と、その異常判定結果に基づいてタイミング信号を補正するタイミング信号補正手段42とを有する。
(もっと読む)
磁気軸受部を有する電動機
【課題】回転子が半径方向に移動しても、回転子を支持する磁気支持力が変化し難い磁気軸受部を備えた電動機を提供する。
【解決手段】固定子18と回転子1と空隙に形成され磁気支持力を発生させる磁気回路に、固定子歯8と永久磁石Mg間の空隙の磁気抵抗Rgより磁気抵抗が大きくなる部位を設けた。
(もっと読む)
スピンドルモータおよびディスク状媒体記録再生装置
【課題】揺動時の騒音発生を抑制し長寿命化を図ると共に消費電流増大を抑制することができるスピンドルモータを提供する。
【解決手段】スラスト動圧発生溝3の外径Doをディスク状媒体20の外径Ddの10%以上として、ラジアル軸受部の溝深さをスラスト軸受部の溝深さよりも大きくする。所定の数値にすることで、スラスト軸受における角度剛性が高くなり、外乱トルクが加わっても軸受内部での金属接触による摩耗や騒音を抑制できる。
(もっと読む)
磁気軸受装置
【課題】 少数の電磁石で、フライホイールを有する回転体を安定良く支持することができ、回転体を短くして、高速回転を可能にする磁気軸受装置を提供する。
【解決手段】 磁気軸受装置は、少なくとも一部が円板状をなすフライホイール11を有する回転体10を、電磁石17a,17b,17c,17d,17e,17fにより軸方向および径方向に非接触支持する。フライホイール11の円板状部分を軸方向の両側から挟んで円板状部分を軸方向に吸引するための1対の電磁石が、円周方向に等間隔をおいた3箇所に1組ずつ配置され、円板状部分の両端面に、電磁石の磁極21a,21bと対向する円環状の突条15,16が形成されている。
(もっと読む)
モータ一体型の磁気軸受装置
【課題】モータコイルの電流波形を正弦波に近づけ、モータロータの発熱抑制およびモータ効率を向上させることができるモータ一体型の磁気軸受装置を提供する。
【解決手段】位相検出器の出力に基づいて3相無整流子モータのステータ28bのコイル28baに電流を印加するコイル電流印加タイミング信号を生成する演算部と、この演算部のコイル電流印加タイミング信号に従ってモータステータ28bの各相のコイル28baに電流を印加するパワー回路とを備える。前記演算部は、位相検出器の出力状態の切り替わる間隔を計測して、電気角30°毎に切り替わる12パターンのコイル電流印加タイミング信号を生成し、電気角30°毎に、6ステップ120°通電と、6ステップ180°通電の電流印加を交互に繰り返すパターンの信号とする。前記パワー回路は、前記コイルの線間電圧となるDCバス電圧を電流印加タイミング毎に可変可能とした電圧可変部を有する。
(もっと読む)
モータ一体型の磁気軸受装置
【課題】 モータコイルの電流波形を正弦波に近づけ、モータロータの発熱抑制およびモータ効率の向上を図ることができるモータ一体型の磁気軸受装置を提供する。
【解決手段】 モータは、モータロータの位相を検出する位相検出器を有する3相の無整流子モータである。位相検出器の出力に基づいてモータステータ28bの各相のコイル28baに電流を印加するコイル電流印加タイミング信号を生成する演算部と、この演算部の出力するコイル電流印加タイミング信号に従ってモータステータ28bの各相のコイル28baに電流を印加するパワー回路とを備える。前記演算部は、位相検出器の出力状態の切り替わる間隔を計測して、電気角360°につき、12パターンのコイル電流印加タイミング信号を任意の角度で生成する。前記12パターンのコイル電流印加タイミング信号は、6ステップ120°通電と、6ステップ180°通電の電流印加を交互に繰り返すパターンの信号とする。
(もっと読む)
回転子の駆動装置
【課題】回転子を軸受け無しで、固定子に設けたコイルで浮上させて回転する。
【解決手段】固定子と、該固定子の円弧状の内周面に沿って周方向に間隔をあけて配置された複数のコイルと、前記固定子の内周側に回転および移動自在に不支持に位置されると共に、周方向にN極とS極を交互に有する回転子と、前記各コイルに交流電流を給電する電源手段を備え、前記電源手段から各コイルへの給電により前記回転子との間に発生させる反発方向の磁界で、前記回転子を固定子から隙間をあけて保持しながら回転させる構成としている。
(もっと読む)
ベアリングレス回転機
【課題】半径方向位置センサの取付位置を固定子に近接若しくは埋設したことで軸方向長を短縮したベアリングレス回転機を提供する。
【解決手段】ベアリングレス回転機10には回転子支持用の支持巻線17と図示していない電動機巻線3が配置されているが位置センサ11の取り付け部分のスロット歯21Aとスロット歯21Bの一部を断面がコの字状に切削し、電動機巻線を施さずに位置センサ11を配置させている。軸支持磁束が対称となるように、スロット歯21Aと180度隔てて対向しているスロット歯21Cに対し、また、スロット歯21Bと180度隔てて対向しているスロット歯21Dに対しても同様に断面をコの字状に刻設している。
(もっと読む)
ベアリングレスモータ及びベアリングレスモータ制御システム
【課題】磁気支持巻線が電動機巻線と対に捲回されることでブラシレスDCモータの永久磁石の磁界を精度良く調整しつつ半径方向位置調整を行い、かつ省スペースで安定した制御の行えるベアリングレスモータ及びベアリングレスモータ制御システムを提供する。
【解決手段】磁気支持巻線13a1と磁気支持巻線13a2を一つの相とし、a相巻線と定義する。同様に、磁気支持巻線13b1、13b2を一つの相とし、b相巻線と定義し、磁気支持巻線13c1、13c2を一つの相とし、c相巻線と定義する。12スロット、8極構造のブラシレスDCモータでは、回転角度φが、15°≦φ<30°、60°≦φ<75°の区間において、a相巻線を励磁して半径方向に磁気支持力を発生する。同様に0°≦φ<15°、45°≦φ<60°の区間においてb相(b1、b2)巻線、30°≦φ<45°、75°≦φ<90°の区間においてc相(c1、c2)巻線を励磁する。
(もっと読む)
誘導反発吸引原理を利用した回転電機
【課題】制御不要の磁気軸受により、信頼性が高く、かつ、長寿命の誘導反発吸引原理を利用した回転電機を提供する。
【解決手段】誘導反発吸引原理を利用した回転電機において、円筒形状に構成される回転子(1)と、該回転子(1)の外周面に配置され、前記回転子(1)の軸方向に隣接する8の字形状に結線された第1のU、V、Wの各相コイル、第2のU、V、Wの各相コイル(10)が順次円周方向に配置された固定子(4)と、前記第1、第2の各U、V、W相コイルにヌル接続点(11)に接続されるU、V、W各相配線(12)とを具備し、前記U、V、W各相配線を中心にして両側に第1、第2のU、V、W各相コイルとを並列に接続した。
(もっと読む)
モータ一体型磁気軸受装置
【課題】 過大なアキシアル荷重が作用した場合でも、安定な制御が可能でコントローラの構成を簡略化でき、かつ主軸の軸長を短くできて、高速回転させることが可能なモータ一体型の磁気軸受装置を提供する。
【解決手段】 このモータ一体型の磁気軸受装置は、転がり軸受と磁気軸受を併用し、転がり軸受15,16がラジアル負荷を支持し、磁気軸受がアキシアル負荷と軸受予圧のどちらか一方または両方を支持するようにしたものである。磁気軸受を構成する電磁石17は、主軸13に設けられた強磁性体からなるフランジ状のスラスト板13aの両面に非接触で対向するように、スピンドルハウジング14に取付けられる。アキシアルギャップモータ28のモータロータ28aは、前記スラスト板13aの両面またはどちらか一方に電磁石ターゲットと共通して配置され、このモータロータ28aと対向するようにモータステータ28bが配置される。
(もっと読む)
モータ一体型磁気軸受装置
【課題】モータに高負荷が作用した場合でも、安定な制御が可能でコントローラの構成を簡略化でき、かつ主軸を短くできて、高速回転させることが可能なモータ一体型磁気軸受装置を提供する。
【解決手段】モータ一体型磁気軸受装置は転がり軸受15,16を併用したもので、主軸13に直角に同軸に形成されたスラスト板13aの両端面にアキシアルギャップモータ28のモータロータ28aが配置され、前記モータロータ28aに対向するようにモータステータ28bが配置される。アキシアル方向の力を検出するセンサ18が設けられ、その出力に応じて、アキシアルギャップモータ28の駆動電流の位相を調整する調整器38を有し、アキシアルギャップモータ28の回転数制御を行うコントローラ29が設けられる。転がり軸受15,16と転がり軸受の支持系とで形成される合成バネの剛性値は、モータ部の負の剛性値よりも大という関係を有するように設定される。
(もっと読む)
リニア・回転駆動装置
本発明は、リニア・回転駆動装置(1)の動作中に共通な動力伝達機構(2)の回転運動と直線移動を可能とし、かつ磁気的な軸受をも行うための手段を有するリニア・回転駆動装置に関する。本発明の装置では、例えば動力伝達機構が2つの軸方向軸受によって動力伝達機構の始端および終端で支持されており、この際、軸方向の軸受はリニア駆動装置によって行なわれる。  (もっと読む)
(もっと読む)
熱発電システム
【課題】 作動媒体の種類に制限を受けることなくタービンの長期回転が可能で、回転起動も円滑に行え、軸受の制御も比較的容易で、発電効率を低下させない熱発電システムを提供する。
【解決手段】 熱エネルギーを吸収するコレクタ1によって、直接または間接的に作動媒体3を加熱し、作動媒体3の蒸気をノズル8aから噴出させ、ノズル8aからの高圧蒸気によってタービン5を回転駆動させる。タービン5の回転によって、発電機6における発電機ロータ6Aを回転させ、発電機ロータ6Aと対向して設けられた発電機ステータ部6Bで発電させる。前記タービン5の翼車5aと前記発電機ロータ6Aとを連結する主軸9を非接触軸受11,12で支持する。この非接触軸受11,12として、動圧軸受およびフォイル軸受13,14,15のいずれかと、磁気軸受31,32,33とを組み合わせて用いる。
(もっと読む)
多軸真空モータアセンブリ
(1)第1ロータ(104)と、(2)整流することで真空バリア(106)を隔てて第1ロータを回転させ、真空チャンバ(108)内の第1ロボットアーム(110)の第1軸の回転を制御するように用いられる第1ステータ(102)と、(3)第1ロータ下方の第2ロータ(122)と、(4)第1ステータの下方に在り、整流することで真空バリア(106)を隔てて第2ロータを回転させ、真空チャンバ(108)内の第2ロボットアームの第2軸の回転を制御するように用いられる第2ステータ(120)と、(5)第1ロボットアーム(110)の回転をモニタするように用いられる第1フィードバック装置(118)と、(6)第2ロボットアーム(124)の回転をモニタするように用いられる第2フィードバック装置(132)とを含む多軸真空モータアセンブリを提供する。
 (もっと読む)
(もっと読む)
動圧空気軸受モータ
【課題】動圧空気軸受モータにおいて、スラスト剛性を解決し、低振動・低騒音で信頼性の高いモータを得ることを目的とする。
【解決手段】シャフト1の先端には、磁気スラスト軸受の第一手段である固定側磁気スラストマグネット11と固定側磁気スラストマグネット11の外周に吸引方向で着磁されている回転側磁気スラストマグネット12が配置され、吸引力F1で吸引されている。磁気スラスト軸受の第二手段は、ロータマグネット7と、鉄からなる基板4との吸引力F2で構成される。
(もっと読む)
1 - 19 / 19
[ Back to top ]