
Fターム[5H680AA06]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 目的、効果 (1,903) | 高効率化 (351)
Fターム[5H680AA06]に分類される特許
161 - 180 / 351
超音波アクチュエータ、磁気記録装置
【課題】装置の複雑化、高価格化を招くことなく、優れた駆動性能を安定して得ることが可能な超音波アクチュエータ、及び磁気記録装置を提供する。
【解決手段】駆動信号により伸縮する圧電変位部を備えた略三角形状の振動体と、振動体の3つの頂点と加圧接触し、該振動体に対して相対移動を生じる移動体と、を有し、移動体は、振動体の3つの頂点が、圧電変位部の伸縮により同一回転方向に楕円振動を行うことにより、振動体に対して相対移動を生じる。
(もっと読む)
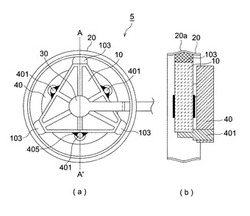
超音波モータ

【課題】ステータを出力軸から離間させた状態でのステータと出力軸との同軸度の高精度化を低コストで実現することができる超音波モータを提供する。
【解決手段】超音波モータ1は、電気−機械エネルギ変換素子を支持する支持部材13を有するステータ10と、支持部材13が固定された状態でステータ10を覆う外筒30と、ステータ10の振動体に励起した振動により駆動されるロータ20と、ロータ20の駆動力により回転駆動される出力軸24と、を備える。支持部材13は、出力軸24に対して係合する係合部13aを有し、該係合部13aは、出力軸24の軸方向に変形可能とされて、該変形後に出力軸24に対する係合が解除される。
(もっと読む)
駆動装置、撮像装置、撮像機器、及び駆動装置の組立方法
【課題】低背化を実現し、かつ、新たな部材を設けることなく簡便に摩擦係合部における予圧を微調整して与えることができる駆動装置を提供する。
【解決手段】本発明の駆動装置は、電気的制御により屈曲変位が励起される屈曲変位部材1A・1Bと、屈曲変位部材1A・1Bに連結されているとともに、鏡筒4と接触し、屈曲変位部材1A・1Bの屈曲変位方向A・Bと異なる方向に変位方向を変換して鏡筒4を駆動する弾性部材2及び摩擦部材3とを備え、屈曲変位部材1A・1B、弾性部材2及び摩擦部材3に予め応力がかけられた状態で、屈曲変位部材1Aが固定されているので、摩擦係合部における予圧を微調整することができる。
(もっと読む)
圧電アクチュエータ駆動装置、電子機器、電子機器の駆動方法
【課題】幅広い駆動電圧に対応でき、かつ圧電アクチュエータの高効率な駆動が確実に実行できる圧電アクチュエータ駆動装置を提供すること。
【解決手段】電源と、圧電アクチュエータAと、この圧電アクチュエータの駆動を制御する駆動制御装置100とを備えた電子機器において、駆動制御装置100は、駆動信号SDRを振動体12の圧電素子に供給する駆動回路111と、振動体12の振動状態を表す位相差を検出する位相差検出手段120と、振動状態の目標となる目標位相差を補正する比較電圧設定回路133と、位相差と目標位相差とを比較する駆動周波数設定手段140とを備え、比較結果に基づいて位相差が目標位相差に近づくように駆動信号SDRの駆動周波数を変更させことで、駆動電圧に依存せず、高効率な圧電アクチュエータAの駆動が実現できる。
(もっと読む)
超音波モータ駆動回路及び超音波モータの駆動信号生成方法
【課題】安価な超音波モータ駆動回路を提供することである。
【解決手段】キャパシタC1、C2とボルテージフォロワ16、17は、それぞれ矩形波の信号A、Bを矩形波の交流信号A’、B’に変換する。第1の乗算器22は、矩形波の国流信号A’と、第1のD/Aコンバータ18でD/A変換された信号を乗算して所望の振幅値の矩形波の交流信号MPY−Aを出力する。第2の乗算器23は、矩形波の交流信号B’と、第2のD/Aコンバータ21でD/A変換された信号を乗算して所望の振幅値の矩形波の交流信号MPY−Bを出力する。そして、それらの信号MPY−A、MPY−Bを正弦波の信号に変換して超音波モータに供給する。
(もっと読む)
振動型アクチュエータ
【課題】 ねじ部を介して嵌合している駆動子と移動子のうちの、駆動子を振動させることで、移動子を大きな力で前進させることができる振動型アクチュエータを提供することを目的としている。
【解決手段】 振動軸2には複数の圧電素子6,7,8,9が設けられ、圧電素子の電歪効果により駆動軸2が撓み振動し、圧電素子に与える駆動信号の位相を変えることにより、振動軸2に固定されている駆動子3が周回動作を行う。駆動子3には雄嵌合部13が形成されており、移動子4の中心穴4aの内周面には、雄嵌合部13と螺合する雌ねじ部14が形成されている。よって、駆動子3の周回動作によって移動子4が回転させられ、ねじの軌跡に応じて移動子4が軸方向へ移動させられる。
(もっと読む)
振動型アクチュエータ及びそれを備えた駆動装置
【課題】駆動子による圧電素子の振動を阻害することを抑制し、超音波アクチュエータとしての効率を向上させる。
【解決手段】超音波アクチュエータ2は、縦振動と屈曲振動とを行うアクチュエータ本体4と、アクチュエータ本体4の一の側面である設置面40a上に設けられて、アクチュエータ本体4の振動に従って周回運動することで駆動力を出力する駆動子8,8とを備えている。駆動子8は、基端部が曲面に形成されて設置面40aに取り付けられる一方、先端部が平面に形成されている。
(もっと読む)
圧電アクチュエータとこれを有するレンズ移送装置
【課題】圧電アクチュエータとこれを有するレンズ移送装置を提供する。
【解決手段】本発明は一つ以上のレンズが配置されるレンズ孔を備え、外部面に被摩擦部材を有するレンズバレルと、上記レンズバレルを光軸方向に上下移動可能に案内する案内部を備えるベースと、上記被摩擦部材と接する少なくとも一つの摩擦部材を一側面に備える圧電体を上記ベースの一側の平面部に配置して電源印加時に駆動力を提供する圧電アクチュエータと、上記被摩擦部材と摩擦部材との接触状態を維持するよう上記圧電アクチュエータを上記レンズバレル側に弾力支持する弾性力を提供する予圧部材と、を含む。
本発明によると、構造を単純化して超小型化を図り、低い入力電力でも大きい変位が得られるため移送の分解能に優れ、駆動にかかる動力の損失を最少化し、レンズの移送を案内する案内メカニズムの構造が単純で、レンズの移送を正確かつ安定に行うことが出来る。
(もっと読む)
圧電アクチュエータ
【課題】圧電素子の自由振動により発生する電流を抑制し、消費電力を低減できる圧電アクチュエータ及びその駆動方法を提供する。
【解決手段】互いに異なる第1及び第2の電圧レベル期間との間に、電圧が印加されない遷移期間を形成できるような電圧波形を駆動回路部で生成し、当該電圧波形によって圧電素子1に印加される電圧を制御する。遷移期間中、圧電素子では電力が消費されないため、消費電力を低減できる。
(もっと読む)
振動アクチュエータ
【課題】小型でありながら正確に回転子の回転位置を測定することができる振動アクチュエータを提供する。
【解決手段】振動体3の駆動により回転子7がX軸回りに回転すると、回転子7と共にジョイント部材12が回転し、スライダ13の突出部14がアーチ状部材8のガイド溝15に案内された状態でスライダ13がアーチ状部材8に沿って移動する。スライダ13に固定されたブラシがアーチ状部材8の第1及び第2の帯部材10及び11の表面にそれぞれ接触しながらスライダ13が移動するため、X軸回り回転位置測定回路17で第1の帯部材10の一端Aから第2の帯部材11の一端Bまでの抵抗値を計測することにより、スライダ13の移動位置、すなわちX軸回りの回転子7の回転位置が測定される。
(もっと読む)
駆動装置
【課題】材料として好適で、耐食性の良好な静止部材を備え、電気機械変換素子の振動を効率よく振動摩擦部に伝えること。
【解決手段】伸縮方向で互いに対向する第1及び第2の端部を持つ電気機械変換素子(441)と、この電気機械変換素子の第1の端部に結合された静止部材(442)と、電気機械変換素子の第2の端部に取り付けられた振動摩擦部(443)と、この振動摩擦部と摩擦結合される棒状の移動部(423)とを備え、電気機械変換素子の伸縮方向に移動部(423)が移動可能な駆動装置(20)において、静止部材(442)は、タングステンを88〜97重量%の範囲で含み、バインダとしてニッケルを2〜11重量%の範囲で含み、残部としてタングステンよりもイオン化傾向の高い金属を0.1〜2重量%の範囲で少なくとも1種添加してなる、基合金から構成され、静止部材の表面にニッケルめっき処理が施されていない。
(もっと読む)
電気機械的なモータ、特に圧電式のマイクロステッピング駆動装置
モータは、互いに垂直に方向付けられた作用方向を備えた2つの駆動エレメント(19a,19b)、特にピエゾ撓み変換器を有している。このアクチュエータ(19a,19b)は駆動リング(1)に作用し、これによって、この駆動リング(1)を介して軸(39)が回動させられる。駆動リング(1)には、対角線方向で反対の側に位置する2つの固定部(3a,3b)が設けられている。両固定部(3a,3b)につき、駆動リング(1)が、それぞれ1つのジョイント式の屈曲エレメント(36a,36b)を介して、各固定部(3a,3b)に対して対角線方向で反対の側に配置されたそれぞれ1つの位置固定エレメント(12,14)にフレキシブルに懸架されている。この結果、半径方向で駆動リング(1)に枢着されていないアクチュエータを備えたコンパクトな駆動装置が得られる。  (もっと読む)
(もっと読む)
超音波モータおよび超音波モータ付電子機器
【課題】 圧電素子に発生した駆動力が外部にもれる要素を減らし、駆動力を効率よく移動体に伝達する超音波モータを提供する。
【解決手段】 入力される駆動信号によって励振して駆動力を発生する圧電素子10と、圧電素子10を基板7上に支持する支持部材11,11と、を備えた超音波モータ1である。支持部材11は、圧電素子10に前記駆動信号を供給する信号供給機能を備える。従って、信号伝達手段を別個に設ける必要はないため、圧電素子10に生じた振動のもれは従来と比べて少なくなる。このため、超音波モータ1は効率よく移動体12aに駆動力を伝達する。また、支持部材11にくびれを設けて弾性を持たせることにより、支持部材11は圧電素子10を移動体12aに圧接する圧接機構も兼ねる。この場合は、圧電素子10に生じた振動のもれはさらに少なくなる。
(もっと読む)
駆動装置の駆動方法
【課題】駆動装置の構造の制限により電気機械変換素子の伸長時と縮小時とで振動摩擦部に速度の異なる変位が得られない場合においても、移動部を駆動すること。
【解決手段】伸縮方向で互いに対向する第1及び第2の端部を持つ電気機械変換素子と、この電気機械変換素子の第1の端部に結合された静止部材と、電気機械変換素子の第2の端部に取り付けられた振動摩擦部と、この振動摩擦部と摩擦結合される移動部とを備え、電気機械変換素子の伸縮方向に移動部が移動可能な駆動装置を駆動する場合、電気機械変換素子の伸長する速度と縮小する速度とを等しくし、静止時間を電気機械変換素子の縮小後および伸長後のいずれか一方に設ける。
(もっと読む)
超音波モータ
【課題】ロータの全円周にわたって同一の回転特性を得ることができる内接型の超音波モータを提供する。
【解決手段】超音波モータ1は、内周面を有するロータ200と、内周面に2の点で接触する超音波振動子11と、超音波振動子11に接続された上側および下側接続部材30および31と、上側および下側接続部材30および31に設けられ、ロータ200を内周面の接線方向に移動させながら、超音波振動子と協働してロータ200の中心の位置を維持し得るように内周面に1点で接触する円盤部材61と、超音波振動子11上の2点および円盤部材61上の1点をロータ200の中心から内周面に向かって押し付けるように上側および下側接続部材30および31を弾性変形させ得る押付機構1000とを備えている。
(もっと読む)
ピエゾ式駆動装置
【課題】送信又は受信される電波が遮断されることが抑制可能なピエゾ式駆動装置を提供すること。
【解決手段】所定周波数の駆動信号がピエゾ素子21に入力され、軸線AXに沿って対象物16が移動されるピエゾ式駆動装置50であって、駆動信号の入力に基づいて伸縮するセラミックス材料のピエゾ素子21と、ピエゾ素子21からの力を受けて軸線AXを中心に回転する非金属の回転体25と、を備える。回転体25はセラミックス材料からなることが好ましい。
(もっと読む)
圧電素子及び振動型アクチュエータ
【課題】圧電素子及び振動型アクチュエータにおいて、フルブリッジ駆動を可能にするとともに、信頼性を向上させる。
【解決手段】圧電素子12は圧電体層1と内部電極層2とを積層してなる。内部電極層2はプラス電極層2a及びマイナス電極層2bからなる。プラス電極層2aは第1及び第2プラス電極層2aa,2abを有する。マイナス電極層2bは第1及び第2マイナス電極層2ba,2bbを有する。第1プラス電極層2aa及び第1マイナス電極層2baはそれぞれ、4つの分割電極3と、4つの分割電極3のうち第1対角線方向に対向する2つの領域にそれぞれ設けられた一対の分割電極3を互いに接続する接続電極4とを有する。第2プラス電極層2ab及び第2マイナス電極層2bbはそれぞれ、4つの分割電極3と、4つの分割電極3のうち第2対角線方向に対向する2つの領域にそれぞれ設けられた一対の分割電極3を互いに接続する接続電極4とを有する。
(もっと読む)
アクチュエータ
【課題】 駆動周波数をアクチュエータ側の共振周波数に一致させなくとも効率良く駆動することができ、しかも駆動回路の構成を簡単にできるアクチュエータを提供すること。
【解決手段】 例えばシャフト11を、駆動信号S1の区間TAでは低速モードで順方向に回転させ、区間TBでは反転モードで逆方向に回転させる。TA>>TBに設定されているため、低速モードから反転モードに至ると、ナット12は追従することができず、シャフト11のみが回転するため、ナット12をシャフト11の軸線方向に移動させることが可能となる。一の駆動信号S1で駆動することができるため、共振周波数からのズレによる駆動効率の低下という問題が無くなる。
(もっと読む)
超音波モータ及び超音波モータ付電子機器
【課題】 積層された圧電振動子の振動方向のバラツキ、振動ロスを防止し、積層構造の小型化、簡略化を図ると共に、合成振動の高出力化を図る。
【解決手段】 電圧の印加により屈曲振動する圧電屈曲振動部材と、前記圧電屈曲振動部材に一体的に積層され、電圧の印加により伸縮振動する圧電伸縮振動部材とを備え、前記圧電屈曲振動部材の屈曲振動と前記圧電伸縮振動部材の伸縮振動との合成振動により可動体を可動させる。また、前記圧電屈曲振動部材の積層面と対向する面のうち、前記圧電屈曲振動部材の分極処理する部分に設けられた第一の電極と、前記圧電伸縮振動部材の積層面と対向する面のうち、前記圧電伸縮振動部材の分極処理する部分に設けられた第二の電極と、前記圧電屈曲振動部材と前記圧電伸縮振動部材との積層面に設けられ、前記第一の電極と前記第二の電極との基準となる基準電極と、を備える。
(もっと読む)
電気機械変換素子,振動アクチュエータ,振動アクチュエータの駆動装置,レンズ鏡筒及びカメラ
【課題】所望の駆動特性が得られやすい電気機械変換素子,振動アクチュエータ,振動アクチュエータの駆動装置,レンズ鏡筒及びカメラを提供する。
【解決手段】電気機械変換素子(12)は、一定方向に分極された分極部分(121a)を有する圧電体(121)と、分極部分(121a)の連続した1つの領域(P)の表面に、それぞれ分離されて形成された複数の電極(122−4,122−5,122−6)とを備える。
(もっと読む)
161 - 180 / 351
[ Back to top ]