
Fターム[5H680AA10]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 目的、効果 (1,903) | 共振周波数維持 (63)
Fターム[5H680AA10]に分類される特許
1 - 20 / 63
振動型アクチュエータの制御装置
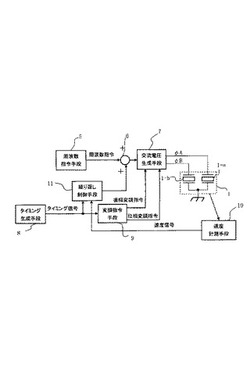
【課題】振動型アクチュエータの状態量の周期的な変動を抑制することが可能となる振動型アクチュエータの制御装置を提供する。
【解決手段】振動波により振動体と接触する移動体を相対移動させる振動型アクチュエータの制御装置であって、
振動型アクチュエータの状態量を計測する計測手段と、
振動型アクチュエータに印加する交流電圧の周波数、振幅、位相を操作するそれぞれの操作パラメータの内の、少なくとも一つの操作パラメータを含む第1の操作パラメータに、移動体の位置又は時間に応じた変動周期で変動を付与する変動付与手段と、
第1の操作パラメータに含まれる操作パラメータ以外の少なくとも一つの操作パラメータを含む第2の操作パラメータを操作し、第1の操作パラメータの周期的変動に起因する振動型アクチュエータの状態量の周期的な変動を抑制する制御手段と、を有する。
(もっと読む)
振動装置の駆動回路、塵埃除去装置及び振動型アクチュエータにおける振動装置の駆動回路

【課題】電気−機械エネルギー変換素子に印加する交番電圧の高調波成分を低減し、振動体の共振周波数のばらつきや駆動中の変化に対し、該変換素子に印加する交番電圧の変動が小さく、安定した電圧振幅を出力することが可能な振動装置の駆動回路を提供する。
【解決手段】電気−機械エネルギー変換素子により発生させた振動波により対象物を駆動する振動装置の駆動回路であって、該変換素子の固有静電容量と、該変換素子に直列に接続された複数のインダクタと、複数のインダクタの間に一端が接続され、且つ、該変換素子に並列に接続されたキャパシタと、によって構成された電気的な共振回路を備え、電気的な共振回路は、少なくとも第1の周波数と第2の周波数とによる2つの共振周波数を有し、第1の周波数をf1とし、第2の周波数をf2とし、交番電圧の周波数をfdとするとき、次式の関係を満たすことを特徴とする。f1<fd<f2
(もっと読む)
振動型アクチュエータの制御装置
【課題】摩擦力の変化、環境変動、個体差による周波数応答特性の変化に追随して、印加電圧の周波数を高精度に制御することができる振動型アクチュエータの制御装置を提供する。
【解決手段】振動型アクチュエータの制御装置は、振動体に加振力を印加するための交流電圧における周波数、振幅、位相のうちの少なくとも一つのパラメータを設定可能な交流電圧生成手段8と、振動体の振動に起因するいくつかの物理量を計測する計測手段9と、交流電圧における少なくとも一つのパラメータに、所定の変動を与える変動付与手段と、変動に応じた第1の信号と、計測された物理量に応じた第2の信号と、の間における少なくとも一つの所定周波数による周波数応答特性を求める周波数応答特性計測手段10と、周波数応答特性に応じて交流電圧の周波数を制御する周波数制御手段と、を有する。
(もっと読む)
振動型駆動装置
【課題】 2つの異なる振動モードの励振を行う振動子において、振動モードの共振周波数差が出力性能に影響を及ぼすが簡易に共振周波数差を調整することは難しい。
【解決手段】 本発明の振動子は、共振周波数調整用の電気−機械エネルギー変換素子による調整領域を備えており、調整領域にインピーダンス素子が接続されている。
(もっと読む)
振動発生装置、その駆動方法、異物除去装置および光学装置
【課題】従来のものに比べ、より一層の駆動効率の向上を図ることが可能となる振動発生装置を提供する。
【解決手段】圧電材料で形成された圧電体を電極で挟持して構成された圧電素子と、
前記圧電素子が接合された振動体と、
前記圧電素子に交番電圧を印加する電源と、
を備え、前記電源による前記圧電素子への交番電圧の印加によって、前記振動体に振動を発生させる振動発生装置であって、
前記圧電素子は、交番電圧印加に伴なって共振周波数が高周波側に変化する圧電体によって構成され、
前記電源の印加による交番電圧の周波数を制御する制御部を備え、
前記制御部は、前記圧電素子へ印加された交番電圧の周波数を制御することにより、前記圧電素子が有する共振周波数の変化範囲を包含する周波数範囲において、該圧電素子の共振周波数を低周波数側から高周波数側に逐次変化させる。
(もっと読む)
振動型アクチュエータの駆動装置
【課題】 ディジタル的に設定可能な交流信号のパラメータを操作量として振動型アクチュエータの振動振幅や移動速度を制御する際に、上記パラメータの設定可能分解能以上の分解能を実現すると同時に不要な振動の発生を抑制する。
【解決手段】 交流信号の周波数、振幅、位相差の少なくとも一つを指令する指令信号を出力する指令手段と、指令信号に変動を与えて出力する変動付与手段と、変動付与手段の出力に応じて周波数、振幅、位相差の少なくとも一つが変調された交流信号を発生する交流信号発生手段とを有し、前記変動付与手段又は前記交流信号発生手段の少なくとも一方の出力信号に対し、所定の振動モードの振動以外の振動を励起する周波数帯域を選択的に減衰させるフィルタ手段を設ける。
(もっと読む)
圧電アクチュエーターの制御装置、圧電アクチュエーター装置及び印刷装置
【課題】 圧電アクチュエーターの高出力での駆動を安定して行うことができる圧電アク
チュエーターの制御装置を提供する。
【解決手段】 検出用電極95,96を介して変位検出部330が検出したアクチュエー
ター部10の駆動に伴う変位及び記憶部340が記憶している変位に基づき位相調整回路
312を介して縦振動用の第1の駆動信号に対する屈曲振動用の駆動信号の一つである第
2の駆動信号の位相を位相調整回路312を介して制御する駆動位相制御部320を有し
、この駆動位相制御部320は、前記第1の駆動信号に対する第2の駆動信号の位相差を
表す所定の初期位相を中心として第1の駆動信号に対する第2の駆動信号の位相を所定の
振り幅で変化させ、これに伴い検出信号が最小となる位相に前記振り幅の中心位相をシフ
トさせるとともにかかる操作を繰り返し前記中心位相が前記変位の最小値に追従してシフ
トされるように記第2の駆動信号の位相を制御するように構成した。
(もっと読む)
圧電アクチュエーターの制御装置、圧電アクチュエーター装置及び印刷装置
【課題】圧電アクチュエーターの高出力での駆動を安定して行うことができる圧電アクチュエーターの制御装置を提供する。
【解決手段】圧電素子に所定の周波数の駆動信号を供給する駆動手段310と、圧電素子の機械的な変位を検出する変位検出部330と、変位信号V1,V2を逐次記憶する記憶部340と、変位検出部330が検出した変位及び記憶部340が記憶している変位に基づき駆動手段310を介して駆動信号の周波数を制御する駆動周波数制御部320とを有し、駆動周波数制御部320は、駆動信号の周波数をスイープさせ、圧電アクチュエーターの最大変位を検出するとともに、最大変位に基づき定められる目標変位に対応する駆動周波数に向けて周波数をスイープさせる。目標変位に対応する駆動周波数に達した後、駆動信号の周波数を変動させることで変位信号が目標変位に追従するように周波数を制御する。
(もっと読む)
圧電振動体装置、及び電子機器
【課題】圧電振動体の振動特性の低下を抑制しつつ、部品点数を削減できる圧電振動体装置、及び電子機器を提供すること。
【解決手段】電極310,320が設けられる圧電素子31,32、及び圧電素子31,32が積層される補強板33を有し、電極310,320への電圧印加に応じて振動する圧電振動体30と、電極310,320と駆動回路基板12とを導通する配線パターン600を有するフレキシブル基板60とを備える。補強板33は、積層部331から延出し、圧電振動体30を支持する地板11に固定される支持部333を備える。フレキシブル基板60は、支持部333と共に地板11に固定される基板固定部60Aを備える。基板固定部60Aは、フレキシブル基板60が折り曲げられて、支持部333の地板11に対向する裏面に配置される固定部62と、支持部333の表面に配置される導通部63とを備える。
(もっと読む)
超音波モータ用振動子摩擦接触部材および超音波モータ用振動子
【課題】振動子先端の摩擦接触部の形状により初期動作が持続して安定な速度、推力、安定な共振周波数が保たれ、安定した動作特性が長期にわたって得られる超音波モータ用振動子を提供する。
【解決手段】被駆動体2を摩擦接触で駆動する超音波モータ用振動子1の摩擦接触部材において、振動子先端の接触子を前記被駆動体との摩擦接触で摩耗する際に軸方向に沿って横断面の外形と横断面積が同一の状態を保つピン形部材で構成したことを特徴とする超音波モータ用振動子摩擦接触部材、およびその超音波モータ用振動子摩擦接触部材を備えた超音波モータ用振動子。
(もっと読む)
振動型モータ制御装置
【課題】 駆動速度を駆動信号位相差によって制御する振動型モータの制御装置において、共振周波数の変動やばらつきによって起こり得る大きな速度駆動を抑える制御をより簡単に行うための構成を提供する。
【解決手段】 圧電体に対して位相の異なる2つの駆動信号A相、B相が印加されことによって圧電体が振動して駆動力が発生する振動型モータの制御装置であって、駆動信号位相差θkを制御する位相差制御手段を有し、位相差制御手段は、振動型モータの駆動速度を変化させる場合に、第1の方向に駆動する場合には0度以上90度以下の範囲を、第1の方向とは反対の第2の方向に駆動する場合には180度以上270度以下の範囲を、駆動信号位相差θkを変化させる範囲とする、または第1の方向に駆動する場合には90度以上180度以下の範囲を、第2の方向に駆動する場合には270度以上360度以下の範囲を、駆動信号位相差θkを変化させる範囲とする。
(もっと読む)
超音波モータ
【課題】単一の部材からなり、構造が単純であり、溝部等が不要であり、縦振動とねじれ振動を容易に励起することができ、縦振動とねじれ振動を合成することにより楕円振動を形成し、楕円振動によりロータを回転させる超音波モータを提供する。
【解決手段】振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動とを合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動子は、複数の圧電シートからなり、圧電シートの厚み方向に分極されてなる活性化領域により、縦1次共振振動と、ねじれ2次共振振動又はねじれ3次共振振動と、を発生する。
(もっと読む)
共振動作に適合されるスマート材料アクチュエータ
作動アームの移動の程度を示すよう構成されるセンサと、共振条件におけるアクチュエータの安全な動作を許容するよう構成されるコントローラと共に、固定支持部材と、機械的ウェブと、作動アームと、圧電又はスマート材料スタックとを有するスマート材料アクチュエータが開示されている。共振動作を維持する方法、共振動作を回避する方法、及び、共振周波数を調節する方法も開示されている。  (もっと読む)
(もっと読む)
超音波モータ
【課題】製造上の様々な理由により振動子における異なる振動モードの共振周波数にばらつきが生じたとしても、調整により、超音波モータが駆動した場合には振動子における異なる振動モードの共振周波数が略一致するようにさせることができるようにする。
【解決手段】超音波モータは、異なる振動モードを縮退させ夫々の振動モードの振動に位相差を持たせることにより楕円振動を生じさせる振動子1と、振動子1に対して相対移動可能に構成された可動体3と、可動体3の相対移動方向と略平行の方向に対して振動子1が固定されるように保持する保持機構4と、振動子1を可動体3に押圧する押圧機構5とを備える。ここで、保持機構4は、当該超音波モータが駆動した場合に振動子1における異なる振動モードの共振周波数が略一致するようにさせるための調整手段を含む。
(もっと読む)
取り付け可能な腕部を有するスマートアクチュエータ装置及びエネルギー取得装置
本発明のスマート材料アクチュエータ装置は、固定支持部材、少なくとも1つの取り付け可能なアクチュエータ腕部及び前記取り付け可能な腕部と可動維持部材に接続される少なくとも1つの協働部材を含む。圧電スタックが前記固定支持部材の第1の取り付け表面及び前記可動支持部材の第2の取り付け表面の間に固着される。前記固定支持部材が実質的に剛性であり、かつ前記第1の取り付け表面と第2の取り付け表面は実質的に平行であり、その間に前記圧電スタックが固着されており、前記圧電スタックに適切な電圧を付加すると、前記圧電スタックは実質的に角度をもって動くことなく伸びる。この伸びは、前記第2の取り付け表面を前記第1の取り付け表面から離すように作用し、それにより前記機械的ウェブの前記協働部材を曲げ、それにより前記取り付け可能なアクチュエータ腕部を動かす。前記ウェブ及び前記取り付け可能な腕部の構成により、前記腕部のアクチュエータ端部が前記圧電スタックの前記伸びよりも大きい距離を移動することとなる。このようにして、前記スタックの伸びが前記機械的増幅装置により実質的に増幅されることとなる。このタイプのアクチュエータ装置は、電気エネルギーから機械的動きを生成するためんと、機械的動きから電気エネルギーを取得するために使用され得る。またかかる動きの量を検出するために使用され得る。機械的動きから電気を生成する方法、かかるアクチュエータ装置を用いて振動を生成する方法に加えて、共鳴周波数を調節し、共鳴操作によりエネルギーの取得の効率を上げる方法に加えて、外部構造との接続のための腕部の設計及び方法のいくつかが開示されている。  (もっと読む)
(もっと読む)
超音波モータの駆動回路装置
【課題】超音波モータの駆動回路における一次側の制御回路ではどうにもならない一次側の高周波入力電圧のパルス幅とET積による二次側の電圧変動を解決する。
【解決手段】圧電振動子を励振させる基準周波数の信号を生成する発振回路と、前記基準周波数の信号と検出信号とでパルス幅を変調する駆動信号発生回路と、ドライバ回路と、スイッチング回路と、一次側の制御された入力電圧を電力増幅するリーケージトランスと、を有し、二次側にリーケージインダクタLkと圧電振動子の制動容量Coとで共振回路を構成させ、圧電振動子を励振させる駆動電圧出力回路としたものである。
(もっと読む)
振動型駆動装置および振動型駆動装置の制御方法
【課題】駆動周波数を最適化できる振動型駆動装置を提供する。
【解決手段】電気機械変換素子と、電気機械変換素子によって振動させられる駆動部材と、駆動部材に摩擦係合する移動体とを有する振動型駆動装置において、電気機械変換素子に、移動体を駆動部材に対して相対変位させない周期的な検出電圧を印加し、検出電圧と、電気機械変換素子を流れる電流との位相差を検出し、この位相差に基づいて、移動体を駆動部材に対して相対変位させる駆動電圧の周波数を決定する。
(もっと読む)
振動波モータの駆動方法及び駆動装置
【課題】振動波モータの実際の回転速度と目標回転速度の回転速度差に応じて、振動波モータに供給する交流電圧の周波数を適切に制御する振動波モータの駆動方法を提供する。
【解決手段】交流電圧により振動体401に振動を発生させて移動体403を駆動する振動波モータ101を、移動体403の目標回転速度Nobjnを設定し、交流電圧の周波数更新量Δfnに対する移動体403の回転速度の増減量ΔNnの割合Tnを求め、目標回転速度Nobjnと移動体403の実際の回転速度Nnとの回転速度差Nobjn−Nnを求め、回転速度差Nobjn−Nnを割合Tnで除することにより周波数更新量Δfnを求め、周波数更新量Δfnを用いて交流電圧の周波数fnを更新する処理を行うことにより、駆動制御する。
(もっと読む)
振動波モータ用の負荷トルク変動装置及び画像形成装置
【課題】 ロータに設けられる回転部材に機構的な特徴を加えてロータ及びステータに同じ接触状態が続くことを回避することで偏磨耗を抑制し、振動波モータの長寿命化を実現する。
【解決手段】 振動波モータMで回転するシャフト405に設けられ、シャフト405に掛かる負荷トルクの大きさをシャフト405の回転位相で変動させる偏心カム1302、アーム1303、付勢バネ1402と、シャフト405に掛かる負荷トルクの周期をシャフト405の回転周期に対して変動させるワンウェイクラッチ1301と、を備える振動波モータ用の負荷トルク変動装置500を構成した。
(もっと読む)
超音波モータ
【課題】駆動位相差を変化させることによる速度制御を行う場合であっても、精度の良好な周波数追尾を行うことが可能な超音波モータを提供すること。
【解決手段】第1の駆動信号及び第2の駆動信号を超音波振動子4に印加して当該超音波振動子4に楕円振動を発生させ、該楕円振動から駆動力を得て被駆動体5を摩擦駆動する超音波モータに、次のような制御を行う制御CPU22を具備させる。前記制御CPU22は、前記第1の駆動信号及び前記第2の駆動信号を生成し、前記振動子の振動状態を検出して振動検出信号を生成し、前記第1の駆動信号と前記第2の駆動信号との合成波と、前記振動検出信号と、の位相差が所定の範囲内になるように前記駆動信号生成部を制御する。
(もっと読む)
1 - 20 / 63
[ Back to top ]