
Fターム[5H680FF27]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111) | 位相制御 (157)
Fターム[5H680FF27]に分類される特許
41 - 60 / 157
駆動装置

【課題】駆動回路を簡素化する。
【解決手段】圧電素子26に第1の極性の駆動電圧を印加して充電する第1スイッチ回路141及び第4スイッチ回路144からなる第1の駆動回路と、逆極性の駆動電圧を印加して充電する第2スイッチ回路142及び第3スイッチ回路143からなる第2の駆動回路と、充電された電荷を放電する第2スイッチ回路142及び第4スイッチ回路144からなる放電回路とを備え、第1の駆動回路と第2の駆動回路とを交互に駆動させる間に放電回路を駆動させる。そして、被駆動部材を、第1の方向に移動させる場合には0.05より大きく、0.45より小さいデューティ比の矩形波からなる駆動電圧を、逆の第2の方向に移動させる場合には0.55より大きく、0.95より小さいデューティ比の矩形波からなる駆動電圧を発生する。したがって、駆動回路14を簡素化することができる。
(もっと読む)
超音波モータ

【課題】駆動位相差制御による速度制御と、周波数追尾と、を両立し、低速度領域においても安定した駆動状態を得ることができる超音波モータを提供すること。
【解決手段】駆動位相差を変化させて駆動速度を制御する超音波モータに、次の速度制御回路111を具備させる。速度制御回路111は、目標速度に対応した駆動位相差の駆動信号を連続的に生成させる第1の動作モードと、互いに異なる複数の駆動位相差の駆動信号を目標速度に対応して周期的に生成させる第2の動作モードと、を目標速度に基づいて切り替える。前記互いに異なる複数の駆動位相差のうち少なくとも一つの駆動位相差は、前記振動検出信号の振幅値を、前記位相差検出部による位相差検出が可能な振幅値とする駆動位相差(第1の駆動位相差)である。周波数制御部は、第2の動作モードで動作している場合には、第1の駆動位相差の駆動信号による駆動期間中に周波数制御する。
(もっと読む)
圧電モーター、液体噴射装置及び時計
【課題】コストが高騰することなく、トルクや回転速度などの回転特性を可変可能な圧電モーター、液体噴射装置及び時計を提供する。
【解決手段】圧電体層40と該圧電体層40を挟んで両側にそれぞれ設けられた第1電極50及び第2電極60とを有する圧電素子30と、圧電素子30が固定される振動部材20と、を有する圧電アクチュエーター10と、前記振動部材20の長手方向の一端部に設けられた当接部21が当接されて回転駆動する回転軸3と、前記圧電アクチュエーター10を前記回転軸3に向かって付勢する付勢手段80と、を具備する圧電モーター1であって、前記回転軸3の前記当接部21が当接する領域が、前記圧電素子30と前記振動部材20の積層方向に対して傾斜した傾斜面3aとなっており、前記圧電素子30に駆動信号を印加すると共に、前記駆動信号の電圧をオフセットする制御部を有する。
(もっと読む)
超音波モータ
【課題】溝部が不要であり、圧電素子に穴部を設ける必要が無く、簡単な構造で楕円振動を容易に励起することができ、超音波振動子に生じる楕円振動によりロータを回転させる超音波モータを提供することである。
【解決手段】超音波モータは、略直方体形状の各辺の比が、略1:1:0.45となっている振動子11と、該振動子11の楕円振動発生面に接して該振動子11の該楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータ15と、を少なくとも備えている。そして、前記振動子11は、該振動子11の同一面に発生する輪郭すべり振動と面たわみ振動を、所定の位相差で同時に励起し、該輪郭すべり振動と該面たわみ振動が発生する面と直交する面に生じた楕円振動の発生部位に接触して、ロータ15を回転駆動させる。
(もっと読む)
超音波モータ
【課題】低速駆動を行う場合であっても、速度特性のばらつきを小さくした超音波モータを提供すること。
【解決手段】パルスデューティ比と駆動速度との関係を示す特性直線上の駆動点を切り替えて駆動速度を制御する制御CPU22を、超音波モータに具備させる。この制御CPU22は、パルスデューティ比、駆動周波数、及び駆動速度の関係を示す特性直線上の駆動点のうち、所望の駆動速度の駆動点のうちパルスデューティ比が最も大きい値である駆動点と、駆動速度が零であり且つパルスデューティ比が最も小さい値である駆動点と、を結んで成る理想速度特性直線上の駆動点または該直線近傍の駆動点を順次切り替えて、駆動速度を変化させる。
(もっと読む)
超音波モータ
【課題】低速駆動を行う場合であっても、不感帯の影響を小さくして良好な制御性且つ高い速度分解能で駆動可能な超音波モータを提供すること。
【解決手段】駆動位相差と駆動速度と特性直線上の駆動点を切り替えて駆動速度を制御する制御CPU22を、超音波モータに具備させる。この制御CPU22は、駆動速度を減少させる場合、駆動周波数の値を変化させずに駆動位相差を増加させ、該駆動点で所定時間だけ駆動した後、駆動位相差を変化させずに駆動周波数の値を前記振動子の共振周波数により近付ける値に切り替える制御を、所望の駆動速度に達するまで繰り返し実行し、駆動速度を増加させる場合、駆動周波数の値を変化させずに駆動位相差を減少させ、該駆動点で所定時間だけ駆動した後、駆動位相差を変化させずに駆動周波数の値を前記振動子の共振周波数からより遠ざける値に切り替える制御を、所望の駆動速度に達するまで繰り返し実行する。
(もっと読む)
超音波モータ
【課題】溝部が不要であり、圧電素子に穴部を設ける必要が無く、簡単な構造で縦共振振動とねじれ共振振動を容易に励起することができ、超音波振動子に生じる楕円振動によりロータを回転させる超音波モータを提供することである。
【解決手段】超音波モータは、中心軸に垂直な断面が略長方形状で直方体形状の振動子11と、該振動子11の楕円振動発生面に接して該楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータ15とを有する。また、振動子11は、中心軸に垂直な断面が長方形状の弾性体21と、該断面の長手方向の一方の面と対向して配置された積層圧電素子25とから成る。そして、振動子11の回転軸方向に伸縮する縦1次共振振動と、該回転軸をねじれ軸とするねじれ2次共振振動若しくはねじれ3次共振振動とを合成して、上記楕円振動を形成する。
(もっと読む)
ミアンダ形振動子およびこれを用いた光学反射素子
【課題】本発明はミアンダ形振動子の駆動効率を向上させることを目的とする。
【解決手段】この目的を達成するため本発明は、複数の振動板11上には、それぞれドライブ素子15が設けられ、これらのドライブ素子15は、振動板11の一方の端部側であって、隣接する振動板11上に設けられたドライブ素子15とは反対の端部側に片寄って配置されたものとした。これにより本発明は、ミアンダ形振動子全体としてはつづら折り状となるように駆動し、従来と比べてエネルギーロスの少ない自然な動作モードとなる。そしてその結果、高い駆動効率を実現できる。
(もっと読む)
振動波モータ用の負荷トルク変動装置及び画像形成装置
【課題】 ロータに設けられる回転部材に機構的な特徴を加えてロータ及びステータに同じ接触状態が続くことを回避することで偏磨耗を抑制し、振動波モータの長寿命化を実現する。
【解決手段】 振動波モータMで回転するシャフト405に設けられ、シャフト405に掛かる負荷トルクの大きさをシャフト405の回転位相で変動させる偏心カム1302、アーム1303、付勢バネ1402と、シャフト405に掛かる負荷トルクの周期をシャフト405の回転周期に対して変動させるワンウェイクラッチ1301と、を備える振動波モータ用の負荷トルク変動装置500を構成した。
(もっと読む)
超音波モータ
【課題】エンコーダなどのセンサを用いることなく、移動体の回転位置や回転速度の検出が可能な超音波モータにおいて、S/Nを向上しつつ、駆動性能の低下を抑える。
【解決手段】移動体13が、溝13cの刻設された移動体本体13aにカバー板13bを積層して成り、前記カバー板13bの部分に、振動体(ステータ)が圧電振動によって発生された楕円振動を与えることで該移動体13が回転し、前記溝13cの通過による駆動信号の変化から位置検出を行うようにしたセルフセンシング方式の超音波モータにおいて、前記溝13cを少なくともカバー板13bの幅以上に形成する。したがって、カバー板13bの下方は、必ずその溝13cによる空孔となっており、剛性の変化から、高いS/Nの検出信号を得ることができる。また、そのS/Nの高さから、溝13cの幅を狭くでき、駆動性能の低下(前記楕円振動の減衰)を抑えることができる。
(もっと読む)
超音波モータ
【課題】単一の部材からなり、構造が単純で、溝部等が不要であり、縦振動とねじれ振動を容易に励起することができ、該縦振動と該ねじれ振動を合成することにより楕円振動を形成し、該楕円振動によりロータを回転させる超音波モータを提供することである。
【解決手段】超音波モータ10は、中心軸に垂直な断面が長方形状の長さ比率を有する振動子11と、該振動子11の楕円振動発生面に接して振動子11の該楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータ15と、を少なくとも備える。上記振動子11は圧電素子単体から成り、その分極の方向が中心軸の方向を含む該振動子11の側面の面内方向にほぼ有り、且つ、該中心軸の方向とのなす角度εが、0<ε<π/2を満たす。そして、上記振動子11の回転軸方向に伸縮する縦1次共振振動と該回転軸をねじれ軸とするねじれ3次共振振動を合成して、上記楕円振動を形成する。
(もっと読む)
圧電アクチュエータ
【課題】接触部の振動軌跡の形状や向きを任意に変更できる圧電アクチュエータを提供すること。
【解決手段】圧電アクチュエータ1は、縦振動および屈曲振動の二つの振動モードの組み合わせにより振動する圧電素子で構成された振動体10を有し、この振動体10には、縦振動を励振させる第1駆動信号印加用の第1駆動電極11と、屈曲振動を励振させる第2、第3駆動信号印可用の第2、第3駆動電極12,13とが設けられ、第2駆動信号の位相を任意に調整する位相調整手段33を備えている。
(もっと読む)
振動アクチュエータ、レンズ鏡筒、およびカメラ
【課題】安価なコストで、良好な駆動性能を達成可能な振動アクチュエータを提供する。
【解決手段】本発明の振動アクチュエータ(10)は、電気エネルギーを機械エネルギーに変換する電気機械変換素子により振動波を生じる振動体(11)と、前記振動体(11)と加圧接触する接触面(32a)を有し、前記振動波によって前記接触面(32a)が駆動されることにより前記振動体(11)に対して相対移動する相対移動部材(15)と、を備える振動アクチュエータ(10)であって、前記相対移動部材(15)は、樹脂で形成された第1の部材(31)及び前記第1の部材(31)より剛性の高い第2の部材(30)を含み、前記接触面(32a)と前記接触面(32a)以外の少なくとも1面とを含む部分が、前記第1の部材(31)で形成されていること、を特徴とする。
(もっと読む)
振動波モータ
【課題】突起の中で径方向の滑りを低減したい位置の振動の軌跡方向を、移動体の変位方向と略一致させ、摺動損失を低減することができる振動波モータを提供する。
【解決手段】振動波モータは、電気エネルギーを機械エネルギーに変換する変換素子(圧電素子1)に交流電圧を印加することによって、変換素子が結合される振動体2に進行性振動波を発生させ、進行性振動波により振動体2に接触する移動体3を摩擦駆動する。そして、振動体2は、変換素子が結合される基部2aと、基部2aに設けられ、移動体3と接触する接触面を有する突起2bとを備える。また、基部2aの移動体3との接触面側に設けられるとともに、突起2bと接続される支持部2cを備える。支持部2cは、振動体2の中心軸と突起2bの周方向の中心とから定められる面に対して、非対称の位置に形成されている。
(もっと読む)
駆動装置及び光学装置
【課題】複数のアクチュエータを安定に動作させることができる駆動装置及び光学装置を提供する。
【解決手段】
圧電素子6a,8aに駆動軸6b,8bを取り付けたアクチュエータ6,8を有し、駆動信号により圧電素子を伸縮させ、圧電素子6a,8aの伸縮動作に応じて駆動軸6b,8bを往復運動させて、駆動軸6b,8bに摩擦係合させた被駆動部材を移動させる駆動装置において、駆動信号として、同一の周波数fで位相が異なるパルス信号Sy,Sxを用いる第1制御部30を備えることで、各圧電素子の消費電流が最大となるタイミングをずらし、圧電素子6a,8aに共通の電源回路63が出力する瞬間最大電流の増大を抑えることができる。
(もっと読む)
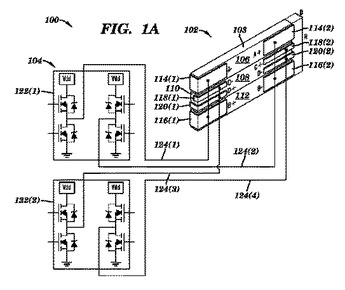
準共振駆動システムおよびその方法
ある構造および振動システムを含む、本発明の実施形態による駆動システムを開示する。該構造は、可動要素に摩擦連結しかつ可動要素を少なくとも2つの方向のうちの1つに駆動するための少なくとも1つの点を有する。また、該構造は、異なる共振周波数をそれぞれ有する、少なくとも2つの曲げモードを有する。該振動システムは、該構造の曲げモードのそれぞれに対する振動周波数の2つ以上の振動信号を印加する。振動周波数は、共振周波数のうちの1つと実質的に同一である。該振動周波数では、該構造の曲げモードのうちの一方は、実質的に共振振動し、該構造の曲げモードの他方は、部分的に共振振動する。振動システムは、2つ以上の印加された振動信号間の位相シフトを調節して、少なくとも2つの方向のうちのいずれに可動要素が移動させられるかを制御する。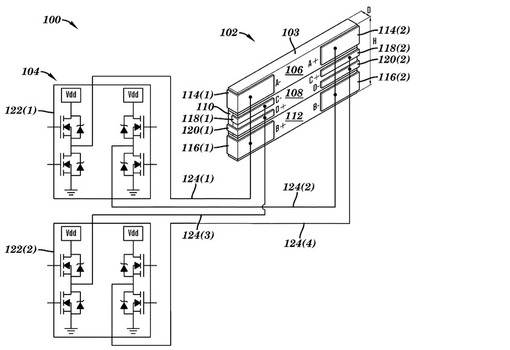
 (もっと読む)
(もっと読む)
超音波モータ
【課題】超音波モータの駆動時に振動子と被駆動体との間の摩擦により生じる磨耗を抑制し、且つ安定した低速駆動を実現する超音波モータを提供すること。
【解決手段】2相の駆動信号を振動子に印加して当該振動子に楕円振動を発生させ、該楕円振動から駆動力を得て被駆動部材を摩擦駆動する超音波モータを次のように構成する。すなわち、前記2相の駆動信号を生成する信号生成回路25と、当該超音波モータの駆動状態を変化させるように、前記2相の駆動信号の位相差を複数回切り替える制御を行う信号制御回路23と、を前記超音波モータに具備させる。
(もっと読む)
超音波モータの駆動方法及び駆動装置
【課題】共振周波数の異なる複数の超音波モータを単独駆動及び同時駆動させるための駆動方法及び駆動装置を提供する。
【解決手段】共振周波数の異なる超音波モータA10と超音波モータB20が、駆動装置100の出力に接続される。駆動装置100は、超音波モータA10を単独駆動させる際には「超音波モータA10の駆動可能な周波数の範囲内、且つ超音波モータB20の駆動可能な周波数の範囲外」の周波数を出力し、超音波モータA10と超音波モータB20を同時駆動させる際には「超音波モータA10の駆動可能な周波数の範囲内、且つ超音波モータB20の駆動可能な周波数の範囲内」の周波数を出力し、超音波モータB20を単独駆動させる際には「超音波モータA10の駆動可能な周波数の範囲外、且つ超音波モータB20の駆動可能な周波数の範囲内」の周波数を出力する。
(もっと読む)
振動型モータ制御装置及びそれを用いた光学機器
【課題】 環境条件や負荷条件、個体差に影響されにくい速度制御を行うことができる振動型モータの速度制御方法を提供する。
【解決手段】 振動型モータに印加される駆動用周波信号の位相差、周波数、または振幅を変更して回転速度を制御する速度制御手段と、振動体に発生する振動を検出する振動検出手段と、前記振動検出手段と前記駆動用周波信号との位相差を検出する位相差検出手段と、を有する振動型モータ制御装置において、
前記位相差検出手段からの信号に基づいて前記速度制御のいずれかを実行するものである。
(もっと読む)
超音波モータ
【課題】 温度センサを設けることなく且つ駆動を妨げることなく超音波モータの温度変化をリアルタイムに検出することができる超音波モータを提供すること。
【解決手段】 超音波振動子4に、所定の位相差及び所定の駆動周波数の2相の交番電圧である駆動信号を印加することで楕円振動を発生させ、該楕円振動から駆動力を得て被駆動体5を摩擦駆動する超音波モータ2を、次のように構成する。すなわち、前記超音波モータ2に、前記駆動信号を生成する信号生成回路25と、前記超音波振動子4の振動状態を検出して振動検出信号を生成する外部電極11と、前記信号生成回路25により生成された駆動信号と、前記外部電極11により生成された振動検出信号と、の位相差を検出する位相差検出回路28と、前記位相差検出回路28により検出された位相差に基づいて、前記超音波モータの温度を算出する温度算出手段22と、を具備させる。
(もっと読む)
41 - 60 / 157
[ Back to top ]