
Fターム[5H680FF36]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 電源回路 (889) | 正弦波 (198)
Fターム[5H680FF36]に分類される特許
101 - 120 / 198
超音波モータ
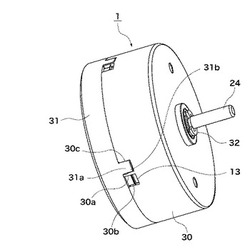
【課題】円周方向にがたつきが生じることなく、適正な軸方向位置で支持部材を圧接固定することができ、また、容易に分解することができる超音波モータを提供する。
【解決手段】後ケース31の凸片31aを凸片嵌合部30cに軸方向(矢印A方向)に嵌合すると、凸片31aのくさび部31bにより支持板圧接部30aが円周方向(矢印B方向)に押される。これにより、支持板圧接部30aが支持板13を支持板係合部30b内で円周方向に挟み込むように弾性変形(或いは塑性変形)し、支持板13が外筒30の支持板係合部30bに圧接固定される。
(もっと読む)
アクチュエーター

【課題】走査軌跡が安定して得られ、低エネルギーで駆動可能で、振動駆動手段により励振された振動に基づき振動子の回転振動を得るアクチュエーターを提供する。
【解決手段】振動駆動手段106,107と、振動子100と、振動駆動手段100及び振動子106の間に配置された第1の対をなす梁101,102と、振動駆動手段100及び振動子107の間に配置された第2の対をなす梁103,104とを有する。梁101,102;103,104のそれぞれは、一端が振動駆動手段106,107に接続されこれらからのx方向振動の伝達を受け且つ他端が振動子100に接続されている。振動駆動手段106,107により発せられる振動を梁101,102;103,104の一端に伝達して、梁をそれらの長手方向に並進振動させることにより、梁をz方向に逆位相で座屈振動させ、これにより振動子100をx方向軸Cの周りで回転振動させる。
(もっと読む)
圧電モータおよびカメラ装置
【課題】駆動特性の安定化を図りつつ、装置全体の小型化を図った圧電モータを提供する。
【解決手段】圧電モータ110は、基台111と、基台111に対して対称に配設されて共通の周波数の交流駆動電圧が印加され作動方向が互いに逆方向の第1および第2の圧電素子112a,112bと、基台111に固定された第1および第2の支点12の周りに回動する第1および第2のてこによって第1および第2の圧電素子112a,112bの作動変位を拡大する第1および第2の変位拡大機構113a,113bと、第1および第2のてこの作用点13部位にそれぞれの一端が連結された第1および第2の板バネ114a,114bと、第1および第2の板バネ114a,114bそれぞれの反対側の端部が固定されて揺動し被駆動部に対して押し付けられて被駆動部との間の摩擦力により被駆動部を駆動する駆動部115と、を備える。
(もっと読む)
超音波モータ用ケースおよび超音波モータ装置
【課題】新たな構造を有する板状の超音波モータを保持するための超音波モータ用ケースおよびこれを用いた超音波モータ装置を提供する。
【解決手段】超音波モータ10は、主面が正方形で一定の厚さを有する圧電セラミックス板11を用い、その一側面に摺動部材13a,13bが設けられた構造を有する。ケース20は、圧電セラミックス板11において摺動部材13a,13bが設けられた側面と対向する側面の一部を把持する底壁部42と、圧電セラミックス板11において摺動部材13a,13bが設けられた側面と直交する二側面のそれぞれの一部を個々に把持する第1,第2側壁部41a,41bを有する凹型形状の第1ケース部21と、円柱形状を有し、その中心軸が圧電セラミックス板11の主面と直交し、その側面の一部が所定の固定面に押圧されるように第1側壁部41aに保持された円柱部材(コマ)23を備える。
(もっと読む)
アクチュエータ
【課題】
軸方向を適宜の方向に選んで回転部材を回転させることができる、故障発生率が極めて小さいアクチュエータを提供する。
【解決手段】
球面体または部分球面体からなる回転部材11と、中心軸と同一方向に柱状連通孔を有し、または当該方向に柱状有底穴を有する多角柱部材12と、前記多角柱部材の側面に、1つ、または周方向に沿って2つ以上設けられた振動発生部材13とを備え前記回転部材の球面部分が、前記多角柱部材の柱状連通孔または柱状有底穴を覆うように前記多角柱部材の端部に設けられ、前記振動発生部材が1つまたは複数の所定域の周波数で駆動されることにより、前記回転部材は、回転軸が前記多角柱部材の中心軸とは異なる方向に向くトルクを前記多角柱部材の端部から受けることを特徴とする。
(もっと読む)
超音波モータ
【課題】素子構造が簡単で駆動制御が容易であり、被駆動体に対する保持も容易な新たな超音波モータを提供する。
【解決手段】超音波モータ10は、主面形状が正方形で一定の厚さを有する圧電セラミックス板11と、圧電セラミックス板11の一方の主面に設けられた2つの駆動電極12a,12bと、圧電セラミックス板11の他方の主面に設けられた共通電極と、圧電セラミックス板11の1つの側面の両端部にそれぞれ設けられた2つの摺動部材13a,13bとを有する。2つの駆動電極12は、圧電セラミックス板11の一方の主面と摺動部材13a,13bが設けられた側面の共有辺の中心を通りこの共有辺に垂直な線によって分けられる2つの領域にそれぞれ独立して設けられる。駆動電極12a,12bの一方に駆動電圧が印加されている間は、他方には駆動電圧は印加されない。
(もっと読む)
微動機構及びその微動機構を備えた顕微鏡装置
【課題】バースト信号による駆動の際に、音の発生を抑えると共にサブミクロンオーダの微動送りを可能にする。
【解決手段】微動機構は、固定台1と、固定台1に対して移動可能に支持された移動体3と、移動体3と固定台1とを相対移動させる超音波アクチュエータ6と、超音波アクチュエータ6の駆動信号を出力する制御装置9とを有し、微動駆動時の超音波アクチュエータ6の駆動信号は周波数が等しく且つ位相が異なる2種類のバースト信号であって、この2種類のバースト信号の夫々の始まりと終わりは振幅が時間的に変化し、少なくとも一方のバースト信号は最大振幅が通常駆動時に比べて小さい。
(もっと読む)
超音波モータ及び超音波モータ付電子機器
【課題】
大きなトルクを発生させるとともに、トルクを安定させる。
【解決手段】
そこで、上記課題を解決する為に本発明の超音波モータは、圧電素子を有する矩形形状の圧電振動子と、圧電振動子の振動により圧電振動子と相対運動する移動体と、圧電振動子の周囲に設けられ、圧電振動子と接触摺動して圧電振動子を移動体の方向に移動可能に案内する案内部材と、圧電振動子に加圧力を与える加圧部材と、を備えた。
(もっと読む)
振動型アクチュエータ
【課題】 支持体に設けられた駆動素子で駆動体を共振させ、駆動体とねじ嵌合している移動体を進行させる振動型アクチュエータを提供することを目的としている。
【解決手段】 振動軸2の下端部を支持している支持体5に複数の圧電素子6,7,8,9が設けられている。これらの圧電素子の電歪効果により支持体5に与えられる振動が支持体5を介して駆動軸2に与えられる。圧電素子に与える駆動信号の位相を変えることにより、振動軸2に固定されている駆動子3を円運動させることができる。駆動子3には雄ねじ部13が形成されており、移動体4の中心穴4aの内周面には、雄ねじ部13と螺合する雌ねじ部14が形成されている。駆動子3の円運動によって移動体4が回転させられ、ねじの軌跡に応じて移動体4が軸方向へ移動させられる。
(もっと読む)
超音波モータ駆動回路及び超音波モータの駆動信号生成方法
【課題】安価な超音波モータ駆動回路を提供することである。
【解決手段】キャパシタC1、C2とボルテージフォロワ16、17は、それぞれ矩形波の信号A、Bを矩形波の交流信号A’、B’に変換する。第1の乗算器22は、矩形波の国流信号A’と、第1のD/Aコンバータ18でD/A変換された信号を乗算して所望の振幅値の矩形波の交流信号MPY−Aを出力する。第2の乗算器23は、矩形波の交流信号B’と、第2のD/Aコンバータ21でD/A変換された信号を乗算して所望の振幅値の矩形波の交流信号MPY−Bを出力する。そして、それらの信号MPY−A、MPY−Bを正弦波の信号に変換して超音波モータに供給する。
(もっと読む)
超音波モータ駆動回路及び超音波モータの駆動信号生成方法
【課題】低コストの超音波モータ駆動回路を提供することである。
【解決手段】D/Aコンバータ制御回路15は、矩形波Aの立ち上がりのタイミングで、駆動信号の振幅値を決めるデジタルデータを第1のD/Aコンバータ16に出力する。また、D/Aコンバータ制御回路15は、矩形波Aと所望の位相差を有する矩形波Bの立ち上がりのタイミングで、駆動信号の振幅値を決めるデジタルデータを第2のD/Aコンバータ17に出力する。D/Aコンバータ16,17は、それぞれデジタルデータをアナログ信号に変換して超音波モータの駆動信号として出力する。
(もっと読む)
振動型モータの駆動制御装置
【課題】低周波域の不要な振動を抑制し、これに伴う回転ムラを抑制することができる振動型モータの駆動制御装置を提供する。
【解決手段】振動型モータ10の駆動制御装置は、振動型モータ10の振動子12の低周波域信号を検出する低周波域検出部52と、低周波域信号とは180度位相の異なる逆位相信号を生成する逆相信号生成部53とを備える。また、逆位相信号と振動型モータ10の駆動制御電圧とを加算する加算器55と、加算器55により加算された信号に応じて、振動型モータ10へ印加する信号の周波数を変える可変周波数発振器45とを備える。
(もっと読む)
振動アクチュエータ装置、レンズ鏡筒、カメラ
【課題】安定した駆動を行うことができる振動アクチュエータ装置、レンズ鏡筒、カメラを提供する。
【解決手段】振動アクチュエータ装置は、信号発生部(L1,L2,102,103)が発生した信号により励振される電気機械変換素子(13)を有する振動子(11)と、前記振動子と接触して配置され、前記振動子との間で相対運動を行う相対運動部材(17)と、前記振動子と前記相対運動部材とを加圧接触させる加圧力を生じる加圧部(15)と、前記信号発生部が発生した信号をモニタし、モニタした信号に基づき前記加圧力を変化させる加圧力変化部(103,105,15c)とを備える。
(もっと読む)
アクチュエータ及びアクチュエータの制御方法
【課題】 駆動用ピエゾ素子の伸縮動作を可動部材に伝達する際に用いられる、複数の部材間の接圧を容易に制御できるピエゾアクチュエータを提供する。
【解決手段】 本発明のピエゾアクチュエータ1は、一端を固定され印加電圧によって伸縮直線運動を行なう駆動用ピエゾ素子2と、当該駆動用ピエゾ素子2の所定の一面に取付けられた棒状の駆動軸4と、駆動軸4と接する位置に配置された可動部材(回転子5)と、一端を固定され印加電圧によって伸縮直線運動を行ない可動部材と駆動軸4との間の接圧を制御する制御用ピエゾ素子6とを備え、駆動用ピエゾ素子2の伸縮直線運動における稼働方向と、制御用ピエゾ素子6の伸縮直線運動における稼働方向とが直交するように配置されている。
(もっと読む)
振動波駆動装置及び振動子
【課題】安価で個体差の小さい振動波駆動装置及び振動子を提供することにある。
【解決手段】円筒状圧電素子101、軸棒102及び連結部103によって振動子104を形成している。連結部103は、軸棒102に一体的に形成されたバネ性を有する張り出し部材によって構成されている。連結部103は、円筒状圧電素子101の径方向において、円筒状圧電素子101と軸棒102よりも、同一の大きさの力に対する弾性変形の量が大きくなる形状、あるいは、材質で構成されている。
(もっと読む)
振動アクチュエータ,レンズ鏡筒及びカメラ
【課題】効率のよい駆動を行うことができる振動アクチュエータ,レンズ鏡筒及びカメラを提供する。
【解決手段】振動アクチュエータ(10)は、電気機械変換素子(2a,2b)の駆動状態を検出する駆動状態検出部(6)と、電気機械変換素子(2a,2b)と接続された静電容量を持つ素子を有し、電気機械変換素子(2a,2b)と素子との合成静電容量を増減させる静電容量増減部(5a,5b)と、駆動状態検出部(6)の検出結果に応じて静電容量増減部(5a,5b)を動作させ、合成静電容量を調整する調整制御部(7)とを備える。
(もっと読む)
超音波モータおよびその駆動方法
【課題】超音波モータの速度をユーザの要求に合わせて任意に設定できるだけでなくより高速に被駆動体を移動させる超音波モータを提供することを目的とする。
【解決手段】圧電セラミックスを積層してなる矩形平板状の圧電板と、該圧電板の面積の大きい2面を主面、積層面を側面とする圧電板において、前記圧電板の一方の主面に2行2列に形成された4つの駆動電極と、前記圧電板を挟んで前記駆動電極と対向するように前記圧電板の他方の主面に形成された共通電極と、前記圧電板の一側面に設けられ、所定の被駆動体と接触する2つの摺動部材とを具備し、前記摺動部材の設置位置を圧電板の端面からの距離を任意に選択することにより任意の速度を得ることを特徴とする超音波モータ。
(もっと読む)
高摩擦摺動膜およびこれを用いた駆動装置
【課題】弾性ヒステリシス損失を利用することにより、耐摩耗性を高めつつ高摩擦係数化を図ることができる高摩擦摺動膜を提供する。
【解決手段】高摩擦摺動膜10は、基材20の表面に形成され、基材20に対して垂直な方向と基材20に対して平行な方向との弾性率が異なり、荷重−変位特性においてヒステリシスを示す。
(もっと読む)
超音波モータ素子
【課題】駆動対象物を高い精度で移動させ,位置決めすることができる超音波モータ素子および超音波モータ装置を提供する。
【解決手段】超音波モータ素子10は、矩形平板状の圧電体11の一方の主面に長さ方向で2分割して設けられた第1,第2電極13a,13bと、他方の主面に幅方向で2分割して設けられた第3,第4電極13c,13dを有する。第1,第2電極13a,13bに印加する電圧の位相を180度ずらし、第3,第4電極13c,13dに印加する電圧の位相を180度ずらし、第1,第2電極13a,13bに印加する電圧と第3,第4電極13c,13dに印加する電圧の位相を90度ずらすことによって、長さ方向の伸縮2次共振振動とその幅方向の曲げ1次共振振動を生じさせる。
(もっと読む)
位置決め制御装置および位置決め制御方法
【課題】移動体を安定した速度で移動させ、しかも高い精度で移動体を目標位置に停止させる位置決め制御装置を提供する。
【解決手段】位置決め装置100においてスライダ50の移動/位置決めを行う制御装置20は、スライダ50を超音波モータ10による摩擦駆動によって所定位置へ移動させて位置決めするために、スライダ50の位置偏差に基づく制御量と速度偏差に基づく制御量を用いて超音波モータ10をPIDフィードバック制御する。制御装置20は、スライダ50を目標位置へ移動させるための移動プロファイルを作成し、移動プロファイルの進行に応じて予めP値,I値,D値が定められた2組以上のPIDパラメータの中から、1組のPIDパラメータを選択し、超音波モータ10を駆動するための制御量を決定する。
(もっと読む)
101 - 120 / 198
[ Back to top ]