
Fターム[5H680FF36]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 電源回路 (889) | 正弦波 (198)
Fターム[5H680FF36]に分類される特許
41 - 60 / 198
駆動装置
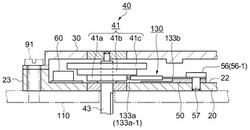
【課題】扁平で薄型化可能な駆動装置を提供する。
【解決手段】駆動装置10は、回転軸43に軸止される外径の異なる円盤状のローター4
1a,41b,41cを有するローター車40と、交流電圧を印加することにより面内振
動し、ローター車40を回転する板状の振動体130と、ローター41a,41b,41
cのいずれかの外周側面に振動体130を一定の付勢力で当接させる振動体付勢部材70
と、振動体130の駆動制御を行う制御回路部60と、ローター車40と、振動体130
と、振動体付勢部材70と、制御回路部60とを収納する第1機枠20と第2機枠30と
からなる筐体とを備えている。複数のローターのいずれかを選択し、振動体130を当接
させることにより、ローター車40の回転速度を切換えることができる。
(もっと読む)
圧電素子を使用した回転駆動装置

【課題】ノードラインの設計位置が不用意に変化し難い回転駆動装置を提供する。
【解決手段】圧電板12に通電層14,16を設けた圧電素子20を具備する振動板10が、該振動板の板面に直交する方向に屈曲して振動板の平面的重心位置Oから放射状に延伸するノードラインN1,N2を発生させる板曲げ振動により、振動板の板面上に設けられた駆動凸部40により、対面する被駆動体50に対して摩擦力を作用させつつ、前記平面的重心位置を通って振動板に直交する中心軸線周りに被駆動体を回転させる回転駆動装置であって、振動板はその外郭形状が多角形であるよう構成する。
(もっと読む)
駆動装置及びレンズ鏡筒
【課題】異なる2方向の振動をそれぞれ独立した振動として取り出すことができる駆動装置とそれを用いたレンズ鏡筒を提供する。
【解決手段】第1部分(4)と第2部分(3)とを相対駆動させる駆動装置1において、第1の方向から第2部分を挟み込む一対の圧電素子(6)と、一対の圧電素子と第2部分とを駆動可能に支持するとともに、一対の圧電素子を介して第2部分の第1の方向とは異なる第2の方向の位置決めをするベース部2と、を備えたことを特徴とする。
(もっと読む)
駆動装置及びレンズ鏡筒
【課題】異なる2方向の振動をそれぞれ独立した振動として取り出すことができる駆動装置とそれを用いたレンズ鏡筒を提供する。
【解決手段】第1部分(4)と第2部分(3)とを相対駆動させる駆動装置1において、第1の方向から第2部分を挟み込む一対の圧電素子(6)と、第2部分を駆動可能に保持するベース部2とを備え、ベース部2の第1の方向と交差する面に溝部2dが形成されていることを特徴とする。
(もっと読む)
圧電モーター、液体噴射装置及び時計
【課題】コストが高騰することなく、トルクや回転速度などの回転特性を可変可能な圧電モーター、液体噴射装置及び時計を提供する。
【解決手段】圧電体層40と該圧電体層40を挟んで両側にそれぞれ設けられた第1電極50及び第2電極60とを有する圧電素子30と、圧電素子30が固定される振動部材20と、を有する圧電アクチュエーター10と、前記振動部材20の長手方向の一端部に設けられた当接部21が当接されて回転駆動する回転軸3と、前記圧電アクチュエーター10を前記回転軸3に向かって付勢する付勢手段80と、を具備する圧電モーター1であって、前記回転軸3の前記当接部21が当接する領域が、前記圧電素子30と前記振動部材20の積層方向に対して傾斜した傾斜面3aとなっており、前記圧電素子30に駆動信号を印加すると共に、前記駆動信号の電圧をオフセットする制御部を有する。
(もっと読む)
超音波モータ
【課題】単一の振動子だけで縦とねじれ振動モードによる楕円振動を形成し、該楕円振動でロータを回転させ、軸方向に回転力を伝達する超音波モータを提供することである。
【解決手段】超音波モータ10は、中心軸に垂直な断面が長方形状の長さ比率を有する積層圧電素子11と、該積層圧電素子11の縦1次共振振動とねじれ3次共振振動の共通の節部分に固定する振動子ホルダ25と、積層圧電素子11の楕円振動発生面に固定した摩擦接触部材12に接して回転駆動するロータ部26aと、該ロータ部26aの回転力を軸方向に伝達するシャフト部から成るシャフト一体型ロータ26と、ロータ部26aを押圧するナット27と、振動子ホルダ25を介して積層圧電素子11を保持するケース30と、を備える。そして、前記積層圧電素子11の回転軸方向に伸縮する縦1次共振振動と回転軸をねじれ軸とするねじれ3次共振振動を合成して、楕円振動を形成して、シャフト一体型ロータ26を回転させる。
(もっと読む)
アクチュエータ、駆動装置、レンズユニット及び撮像装置
【課題】アクチュエータの出力を高める。
【解決手段】移動子を移動させるアクチュエータであって、前記移動子から前記移動子の移動方向と直交する方向に離れた位置から前記移動子へ向けて延び、前記移動子から遠い側の端から前記移動子の側へ設けられた溝により前記移動子の移動方向に分岐された一対の脚部を有する突起部と、前記一対の脚部の一方を支持し、電力を供給されることにより、前記移動子の移動方向と交差する方向に伸縮する第1電気機械変換部と、前記一対の脚部の他方を支持し、電力を供給されることにより、前記移動子の移動方向と交差する方向に前記第1電気機械変換部とは異なる位相で伸縮することにより、前記第1電気機械変換部と協働して、前記突起部を、前記移動子の側に変位しながら前記移動子の移動方向に揺動させる第2電気機械変換部と、を備えるアクチュエータ。
(もっと読む)
振動波モータの駆動方法及び駆動装置
【課題】振動波モータの実際の回転速度と目標回転速度の回転速度差に応じて、振動波モータに供給する交流電圧の周波数を適切に制御する振動波モータの駆動方法を提供する。
【解決手段】交流電圧により振動体401に振動を発生させて移動体403を駆動する振動波モータ101を、移動体403の目標回転速度Nobjnを設定し、交流電圧の周波数更新量Δfnに対する移動体403の回転速度の増減量ΔNnの割合Tnを求め、目標回転速度Nobjnと移動体403の実際の回転速度Nnとの回転速度差Nobjn−Nnを求め、回転速度差Nobjn−Nnを割合Tnで除することにより周波数更新量Δfnを求め、周波数更新量Δfnを用いて交流電圧の周波数fnを更新する処理を行うことにより、駆動制御する。
(もっと読む)
微動機構
【課題】バースト波状駆動信号による駆動の際に、音の発生を抑えると共にサブミクロンオーダの微動送りを可能にする。
【解決手段】微動機構は、固定台1と、固定台1に対して移動可能に支持された移動体3と、移動体3と固定台1とを相対移動させる超音波モータ6と、超音波モータ6の駆動信号を出力する制御装置9とを有する。ここで、超音波モータ6の駆動信号は、周波数が等しく且つ位相が異なる2種類の駆動信号であって、その2種類の駆動信号の夫々は、微動駆動時の最大振幅と通常駆動時の最大振幅が異なり、且つ、微動駆動時においては、一方の駆動信号の最大振幅と他方の駆動信号の最大振幅が異なる。
(もっと読む)
超音波モータおよび超音波モータ付電子機器
【課題】 駆動力を大きくした超音波モータを提供する。
【解決手段】 屈曲振動源である圧電振動子11と、伸縮振動源である圧電振動子12と、を一体的に積層させた圧電素子10を有する超音波モータである。圧電振動子11は、スイッチ17a、17bを介して交流電源6に接続される。圧電振動子11には、同極性に分極した分極領域11a、11dと、分極領域11a、11dと逆極性に分極した分極領域11b、11cと、を交互に配列する。圧電素子12は、同極性に分極した分極領域12aを有する。圧電素子10に交流電源6から駆動信号を入力すると、圧電素子10の端面には楕円振動が生じるため、該端面に当接している移動体は移動する。スイッチ17a、17bを切り替えると、この楕円振動の振動方向は逆転するため、前記移動体の移動方向は逆転する。
(もっと読む)
駆動装置
【課題】消費電力の少ない駆動装置を提供する。
【解決手段】駆動装置1は、圧電素子を用いて構成されたアクチュエータ本体4及びアクチュエータ本体4に設けられてアクチュエータ本体4の振動に従って運動することで駆動力を出力する駆動子8,8を有する超音波アクチュエータ2と、周波数が同じで位相が異なる第1及び第2交流電圧を圧電素子に印加してアクチュエータ本体4に振動を発生させる制御部10とを備えている。制御部10は、第1交流電圧と前記第2交流電圧とを電圧値が互いに異なるように調節する。
(もっと読む)
超音波モータ
【課題】圧電体を設ける領域を有効に使用して、効率よく駆動する超音波モータを得る。
【解決手段】第3のA電極33pは、径方向における幅が33.75°であって、第4のA電極34pと第2のB電極32mとの間に設けられる。径方向において第4のA電極34pの一部と11.25°に渡り重なりあう。第3のB電極33mは、径方向における幅が33.75°であって、第4のA電極34pと第2のB電極32mとの間に設けられる。径方向において第2のB電極32mの一部と11.25°に渡り重なりあう。第3のA電極33pの一部と第3のB電極33mの一部は、径方向において22.5°に渡り重なり合う。これは、交流電源の波長、つまり弾性部材の超音波振動による波長の1/4の長さである。第3のA電極33pと第3のB電極33mとの境界は、第3のA電極33pの面積と第3のB電極33mの面積とが略同じになるような位置に設けられる。
(もっと読む)
アクチュエータ駆動装置、レンズ鏡筒および撮像装置
【課題】回路規模を大きなものとすることなく、電源の電圧が変動した場合においても、アクチュエータの駆動を適切に制御することができるアクチュエータ駆動装置を提供すること。
【解決手段】アクチュエータを駆動させるための電源からの電圧を検出する電圧検出手段と、前記アクチュエータに駆動信号を出力する駆動信号出力手段と、前記電源からの電圧及び前記駆動信号と、前記アクチュエータの駆動速度との関係を示す情報を記憶する記憶手段と、を備え、前記駆動信号出力手段は、前記電圧検出手段で検出された前記電源からの電圧に応じて、前記記憶手段に記憶された前記情報に基づいて求めた駆動信号を出力することを特徴とするアクチュエータ駆動装置。
(もっと読む)
超音波モータ駆動装置
【課題】小型な構成で、高速に大きな変位量で駆動できる超音波モータ駆動装置を提供すること。
【解決手段】超音波振動子101を備え、超音波振動子101に2相の交番電圧信号を供給することにより、縦振動モードおよび屈曲振動モードを同時に励起させて出力端に略楕円振動を生じさせる超音波モータ駆動装置であって、
超音波振動子101に交番電圧信号を印加する制御部106と、
積層された超音波振動子101の対向に配置されている端面に少なくとも1個以上配置された駆動子120a等と、
駆動子120a等に対向し押圧接触するよう配置された複数の摺動部材110a、110bと、を具備し、
駆動子120a等に発生する楕円振動の時間的な軌跡の回転する向きが同方向となる。
(もっと読む)
超音波モータ
【課題】溝部が不要であり、圧電素子に穴部を設ける必要が無く、簡単な構造で縦共振振動とねじれ共振振動を容易に励起することができ、超音波振動子に生じる楕円振動によりロータを回転させる超音波モータを提供することである。
【解決手段】超音波モータは、中心軸に垂直な断面が略長方形状で直方体形状の振動子11と、該振動子11の楕円振動発生面に接して該楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータ15とを有する。また、振動子11は、中心軸に垂直な断面が長方形状の弾性体21と、該断面の長手方向の一方の面と対向して配置された積層圧電素子25とから成る。そして、振動子11の回転軸方向に伸縮する縦1次共振振動と、該回転軸をねじれ軸とするねじれ2次共振振動若しくはねじれ3次共振振動とを合成して、上記楕円振動を形成する。
(もっと読む)
組み合わせた共振器を備えて音響定在波に基づく圧電疑似共振モータ
圧電装置は対向する第1及び第2の表面部を有すると共に、対向する第3及び第4の表面部を有する圧電共振子本体3を含む。その装置は、さらに第2の表面部15に配置された少なくとも1個の共通の電極8と、第1の表面部14に第1の縦軸に沿って配置された対の電極4a,4bとを含む。その装置は、さらに第3の表面部16及び第4の表面部17の、第1の縦軸に沿って接触場所に配置され、それぞれの励起電極の対の間に位置合わせされた接触素子5を含む。その装置で圧電共振器本体は、第2の縦軸に沿った第1次の固有共振周波数(ν1)と、第1の縦軸に沿った第1次と等しい次数の固有共振周波数(ν2)とを持ち、固有共振周波数(ν1)と固有共振周波数(ν2)とのパーセント差は、0%より大きくて20%以下である。 (もっと読む)
振動波モータ用の負荷トルク変動装置及び画像形成装置
【課題】 ロータに設けられる回転部材に機構的な特徴を加えてロータ及びステータに同じ接触状態が続くことを回避することで偏磨耗を抑制し、振動波モータの長寿命化を実現する。
【解決手段】 振動波モータMで回転するシャフト405に設けられ、シャフト405に掛かる負荷トルクの大きさをシャフト405の回転位相で変動させる偏心カム1302、アーム1303、付勢バネ1402と、シャフト405に掛かる負荷トルクの周期をシャフト405の回転周期に対して変動させるワンウェイクラッチ1301と、を備える振動波モータ用の負荷トルク変動装置500を構成した。
(もっと読む)
超音波モータ
【課題】エンコーダなどのセンサを用いることなく、移動体の回転位置や回転速度の検出が可能な超音波モータにおいて、S/Nを向上しつつ、駆動性能の低下を抑える。
【解決手段】移動体13が、溝13cの刻設された移動体本体13aにカバー板13bを積層して成り、前記カバー板13bの部分に、振動体(ステータ)が圧電振動によって発生された楕円振動を与えることで該移動体13が回転し、前記溝13cの通過による駆動信号の変化から位置検出を行うようにしたセルフセンシング方式の超音波モータにおいて、前記溝13cを少なくともカバー板13bの幅以上に形成する。したがって、カバー板13bの下方は、必ずその溝13cによる空孔となっており、剛性の変化から、高いS/Nの検出信号を得ることができる。また、そのS/Nの高さから、溝13cの幅を狭くでき、駆動性能の低下(前記楕円振動の減衰)を抑えることができる。
(もっと読む)
超音波モータの速度制御装置、方法及びプログラム
【課題】電流を上昇することなく低速駆動を可能にした超音波モータを提供する。
【解決手段】超音波モータの応答周波数範囲の周波数信号を決定するPID制御部13と、この周波数信号よりも高周波である他の周波数信号を生成する周波数信号生成部14と、この他の周波数信号をもとに、パルス幅を制御したPWM信号を生成するPWM制御部15とを具備した速度制御装置により、超音波モータの制御を行う。
(もっと読む)
高電圧出力ドライバーおよび圧電ポンプ
【課題】電源立ち上がり時におけるショックの発生を効果的に防止する。
【解決手段】昇圧回路において、低電圧電源の出力を昇圧して高電圧の駆動電源電圧を発生する。また、出力回路では、駆動電源を電源として、圧電素子を駆動する一対の相補的な駆動信号を出力する。出力を停止する前記駆動電源の立ち下がり時において、一対の駆動信号の電位差が0の時点から両駆動信号を一緒にグランドレベルまで変化させる。
(もっと読む)
41 - 60 / 198
[ Back to top ]