
Fターム[5J070AG03]の内容
レーダ方式及びその細部 (42,132) | ビーム形状又はビーム走査 (558) | ペンシルビーム (62)
Fターム[5J070AG03]に分類される特許
21 - 40 / 62
クラッタ判別方法およびレーダ装置
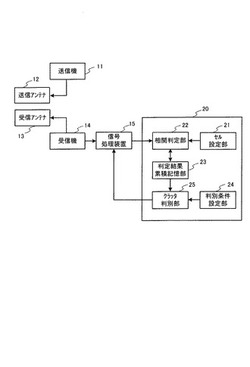
【課題】固定目標、ウェザークラッタ及びシークラッタの判別精度を高めて、固定目標、ウェザークラッタ及びシークラッタを移動目標と誤認する頻度を極小化可能にする。
【解決手段】レーダ装置の探知覆域内を複数の領域(セル)に分割するとともに、当該レーダ装置で受信されMTI及びMTDドップラフィルタ処理後に検出された目標に対して、前記セル単位でレーダスキャン毎の相関判定を実施し、相関判定結果を前記セル単位で累積記憶し、同一又は周辺セルとの相関の連続性が、予め設定したクラッタ判別条件と一致する目標をクラッタと判別する。
(もっと読む)
表層流速推定方法、装置並びにプログラム

【課題】海洋レーダによって得られるデータを用いた沿岸表層流動の観測において、外因性ノイズの影響を排除してドップラースペクトルの正当なピーク周波数を短時間で検出することができるようにする。
【解決手段】ドップラースペクトルの正の領域のスペクトルから正の領域のスペクトルの周波数方向の平均値を引いて算出される偏差について部分領域の平均値を算出すると共にドップラースペクトルの負の領域のスペクトルから負の領域のスペクトルの周波数方向の平均値を引いて算出される偏差について部分領域の平均値を算出し、部分領域毎の正の領域のスペクトルの偏差の部分領域の平均値と負の領域のスペクトルの偏差の部分領域の平均値との合算値が最大である部分領域と連接し且つ部分領域毎の合算値が所定の閾値よりも大きい部分領域からなる連接領域の中からピーク周波数を検出するようにした。
(もっと読む)
物体探索装置、物体探索システム及び無線通信端末
【課題】 予め探索対象物体(例えば、物品、生物、人間など)の位置情報を登録することなしに、その探索対象物体が現在何処にあるのかを明らかにする物体探索システムを提供する。
【解決手段】 本発明による物体探索システムは、探索対象物体を探索する物体探索装置と、探索対象物体に付けられている無線タグとを備える物体探索システムであって、物体探索装置は、無線タグと通信をする無線通信手段と、無線タグと電波を送受信する際の電波情報に基づいて無線タグとの間の距離を測定する手段と、距離を測定した測定位置の位置情報を取得する手段と、2以上の異なる測定位置において距離が測定されると、距離と測定位置の位置情報とに基づいて探索対象物体の位置を推定する手段と、推定された位置に関する情報を出力する出力手段とを有することを特徴とする。
(もっと読む)
標定レーダ装置
【課題】位置標定に対する精度を維持しつつ、より広い範囲を監視して目標の位置標定を行なうことのできる標定レーダ装置を得る。
【解決手段】監視対象領域を低仰角の初期探知領域と高仰角の進路観測領域に分割し、初期探知領域に目標探知のためのビーム幕を形成しておき、この領域で探知した目標については、その捕捉情報を取得するとともに、進路観測領域に進入後の進路を予測する。そして、この目標が進路観測領域に進入後は、予測した進路の方向に指向させたレーダビームにより目標の捕捉情報を継続して取得し、その後、これら一連の捕捉情報に基づいて目標の発射位置の標定を行なう。
(もっと読む)
駆動装置
【課題】誘電体中の透過率が高められ、被検知体に向けて精度よく電波ビームが放射される高周波センサを備えた駆動装置が提供される。
【解決手段】誘電体部材と、前記誘電体部材を透過する電波ビームを放射し、被検知体からの反射波を受信し、検知信号を生成する高周波センサと、前記検知信号により動作する駆動機構部と、を備え、前記誘電体部材の表面を含む平面と、前記電波ビームを放射するアンテナの放射面を含む平面と、は、ゼロよりも大きく90度よりも小さい角度をなして交差線上で交差し、前記誘電体部材を透過する前記電波ビームの強度が、前記表面で反射する前記電波ビームの強度よりも高くなるように、前記電波ビームの励振方向が前記交差線と交差してなることを特徴とする駆動装置が提供される。
(もっと読む)
レーダ装置
【課題】捜索や追尾のために用いられ、フォルスの誤探知やクラッタへの誤追尾を抑制するために、僅かな演算処理時間でアンテナパターンを制御することによりグランドクラッタを低減する航空機搭載用のレーダ装置を提供する。
【解決手段】レーダ装置は、航空機に搭載され、且つ構成するアクティブモジュールの位相を制御するとアンテナパターンが可変するフェイズドアレイアンテナを備えるレーダ装置において、航空機の姿勢が任意のロール角に制御されているとき、フェイズドアレイアンテナのアンテナパターンに地表面側に低サイドローブが存在するようアクティブモジュールに設定する位相データが、ロール角毎に予め記憶される位相テーブルが格納される位相データ格納メモリと、入力される航空機のロール角に基づいて選択される位相テーブルから読み出す位相データでアクティブモジュールの位相を設定する位相制御部と、を備える。
(もっと読む)
疑似電波発生レーダシステム
【課題】ARMを誘導するための効率的な送信ビーム形成が可能疑似電波発生レーダシステムを提供する。
【解決手段】複数の疑似電波発生装置100と、複数の疑似電波発生装置100から送信する送信ビームを合成するビーム形成部30と、ARMの飛来情報に基づいて、送信信号の相関関数行列を選択するための相関行列選択器21とを備え、相関行列選択器21が選択する相関関数行列に応じて、ビーム形成部30が合成する送信ビームのビームパターンを形成する。
(もっと読む)
物体検知装置
【課題】基準走査方向に存在する物体の検知可能距離を確保し、かつこの基準走査方向から外れた位置に存在する物体の検知能力を確保することができる物体検知装置を提供する。
【解決手段】レーダ装置1は、水平方向に分割した検知領域毎に、その検知領域における存在を検知したい物体の距離範囲に応じて垂直方向の走査範囲を変化させる。例えば、水平方向における基準走査方向を正面前方に決定している場合、この基準走査方向から離れるにつれて、レーザ光の垂直走査範囲を大きくする。これにより、レーダ装置1は、水平方向における走査角度毎に、その走査角度において、存在を検知したい物体の距離範囲で、垂直方向におけるレーザ光の照射範囲をほぼ同じにする。
(もっと読む)
物体検知装置、車両、ビームパターン生成方法、プログラム及び記録媒体
【課題】従来の振幅モノパルス処理を用いる物体検知装置では、物体の位置によってはその物体の位置を特定できない場合があった。
【解決手段】複数のビームパターンを有する送信アンテナ105aと、複数のビームパターンを有する受信アンテナ105bと、送信アンテナ105aのいずれかのビームパターンと受信アンテナ105bのいずれかのビームパターンを組み合わせることによって生成される所定の合成ビームパターンを複数種類生成できるビームパターン合成部109と、それらの複数種類の所定の合成ビームパターンの中から予め決められた所定の2つの合成ビームパターンの組み合わせを選択してビームパターン合成部109に生成させるビームパターン選択部111と、それらの複数の所定の2つの合成ビームパターンのそれぞれについて得られる、反射波の受信強度及び物体までの距離に基いてその物体の位置を特定する物体位置特定部108とを備える。
(もっと読む)
車両用レーダ装置の軸ずれ検出装置および方法
【課題】 被検出物体18,19との間の距離を検出するために放射するビームを、鉛直軸線6まわりにほぼ水平面内で、予め定める軸線7の左右両側にわたって走査偏向し、前記予め定める軸線7と、車両の直線走行の軸線21との軸ずれ角θを正確に検出する。
【解決手段】 車両13にレーダ手段25を装着し、駆動手段5によってレーダ手段25からのビームが走査するように角変位駆動し、反射ビームを受信する。車両13が直線道路の左走行レーン16を走行中、左方の路側に設けられた直線状ガードレール18を、前記予め定める軸線7の左側方で、走査角度φが異なる複数回、検出し、これらの複数の各検出位置を結ぶ仮想直線yLa,yRaを演算して求め、その傾きkに対応する軸ずれ角θを演算して求める。
(もっと読む)
ビーム走査装置及びビーム走査方法
【課題】簡易な構成で装置規模を拡大することなく、指向性利得のばらつきを低減して探知性能を向上することができるビーム走査装置を提供する。
【解決手段】一様でない指向性利得を有するビームの制御を行うビーム走査装置であって、複数の所定のビーム走査角の中から一つを順次選択するとともに、選択したビーム走査角に応じた第1ビーム走査角信号を生成するビーム走査角選択器11bと、ノイズを発生させるノイズ発生器14と、複数の所定のビーム走査角に基づくノイズ付加範囲を設定するとともに、ノイズ発生器14により発生したノイズに対してノイズ付加範囲に合わせて平行移動又はスケーリングの少なくとも1つを施して得られた乱数を、第1ビーム走査角信号に応じたビーム走査角に対して加算して得られたビーム走査角に応じた第2ビーム走査角信号を生成するノイズ付加器13と、ノイズ付加器13により生成された第2ビーム走査角信号に基づきアンテナのビーム指向方向を指示するアンテナ制御信号を生成する走査角制御部6とを備える。
(もっと読む)
電波スイッチ
【課題】従来の電子スイッチにおいては電子画面装置の画面を切替える際、少ない動作で簡単に操作することができなかった。
【解決手段】
電波を発生する発振回路と、電波を被検知体に向けて放射する送信アンテナと、前記送信波の物体による反射波を受信波として受信する受信アンテナと、送信波を複数の方向に向けて放射するように電波の放射方向を切替制御する電波方向切替回路と、前記受信波を検知する検波回路と、前記検波回路から出力されるドップラー信号と、その時の送信波を放射している方向とから、被検知体の動作状態を判断し、確定する判断回路と、を備え、前記電波方向切替回路により送信波を所定の方向へ順次切り替え、前記判断回路が、複数の方向に向けて放射された送信波のいずれか一つの放射方向にて被検知体を検知し、動作状態を確定した時に、前記判断回路の結果を外部へ出力する出力回路とを備えた電波スイッチを提供する。
(もっと読む)
ビーム走査装置及びビーム走査方法
【課題】簡易な構成で装置規模を拡大することなく、指向性利得のばらつきを低減して探知性能を向上することができるビーム走査装置を提供する。
【解決手段】一様でない指向性利得を有するビームの制御を行うビーム走査装置であって、複数の所定のビーム走査角の中から一つを順次選択するとともに、選択したビーム走査角に応じた第1ビーム走査角信号を生成するビーム走査角選択器11bと、複数の所定のビーム走査角に基づきビーム指向方向を変動させる微小変動量を算出する微小変動発生器14と、ビーム走査角選択器11bにより生成された第1ビーム走査角信号に応じたビーム走査角に対して微小変動発生器14により算出された微小変動量を加算して得られたビーム走査角に応じた第2ビーム走査角信号を生成する微小変動付加器13と、微小変動付加器13により生成された第2ビーム走査角信号に基づきアンテナのビーム指向方向を指示するアンテナ制御信号を生成する走査角制御部6とを備える。
(もっと読む)
対象物検出装置
【課題】シングルビーム方式のレーダ装置を用いて車両の周囲に位置する対象物が存在するレーン位置を特定する対象物検出装置を提供する。
【解決手段】検出範囲にある対象物までの距離のみを検出可能なシングルビーム方式の右方レーダ装置4及び左方レーダ装置5を備え、各レーダ装置4、5のパラメータ情報と、車両2の現在位置情報と、車両2が走行する道路の道路形状情報とに基づいて、各レーダ装置4、5により特定のレーン内に位置する対象物を検出可能な対象物存在範囲70、71を算出し、検出した対象物までの距離に基づいて対象物のレーン位置を特定するように構成する。
(もっと読む)
レーダ装置の信号処理方法およびレーダ装置
【課題】CFAR処理などを用いた目標検出処理を行うレーダ装置において、誤目標の発生確率を抑制すること。
【解決手段】Mainアンテナによる受信信号の振幅値(Main振幅)と受信ノイズの振幅値(Mainノイズ)との比として定められる第1被判定値を所定第1の閾値と比較する第1ステップと、Main振幅とGuardアンテナによる受信信号の振幅値(Guard振幅)との比として定められる第2被判定値を所定第2の閾値と比較する第2ステップと、Guard振幅とGuardアンテナによる受信ノイズの振幅値(Guardノイズ)との比として定められる第3被判定値を所定第3の閾値と比較する第3ステップとを含み、第1ステップによる比較判定結果が所定第1の閾値を超えている場合に、第2ステップによる比較判定結果が所定第2の閾値を超えることなく且つ第3ステップによる比較判定結果が所定第3の閾値を超えている場合に検知対象物を真の目標として判定するのを保留する。
(もっと読む)
高周波センサ装置
【課題】使用条件などに応じてスキャン速度を可変とした高周波センサ装置を提供する。
【解決手段】送信波を発生する発振回路と、前記送信波を複数の方向に放射可能とし、前記送信波の物体による反射波を受信波として受信するアンテナと、前記受信波を検知する検波回路と、前記検波回路により検知されたドップラー信号に基づいて被検知体の検知の有無を判定する制御判断回路と、を備え、前記制御判断回路は、前記アンテナから放射される電波の方向を複数の方向のいずれかに第1の速度で順次切り替える第1のスキャンモードと、前記アンテナから放射される電波の方向を複数の方向のいずれかに前記第1の速度とは異なる第2の速度で順次切り替える第2のスキャンモードと、を実行可能であることを特徴とする高周波センサ装置が提供される。
(もっと読む)
フェーズドアレイアンテナ装置とそのビーム成型方法
【課題】ペンシルビームとファンビームとの切り替えを行う場合に、移送器を常時ONさせた状態で、物理的にアンテナ素子の動作をOFFさせた半開口と同等のビーム幅をもつファンビームを成型する。
【解決手段】100ポートのアンテナ素子11にそれぞれ接続される移相器12は、走査制御器14から指示される移相量に応じて高周波給電回路13からの高周波に所定の移相量を与えて所定の方向にビームを成形する。走査制御器14には、レーダ装置本体からビーム指向方向と全開口/半開口を指示するモード情報が与えられる。上記走査制御器14では、走査角が与えられると、その走査角に基づく位相分布を求め、それぞれの移相器12に対する移相量θmを設定し、全開口か半開口かを判断し、全開口ならばそのまま100ポートに指定する移相量[deg]として決定し、半開口ならばさらに不要なポートに対してランダムな移相量φnを与える。
(もっと読む)
三次元レーダー像のレンダリングのための装置及び方法
【課題】改善された解像度を有する画像、及びレーダーの位置からだけではなくパイロットの視点からの画像も提供するための改善したレーダーシステム及び方法を提供する。
【解決手段】本発明に従ったレーダー走査地形表面の3D描画画像は地形表面からのレーダーエコー信号によって与えられる。エコー信号は地形表面のレーダー照射領域の方位、高度、及び距離を示すデータを含む。データはX,Y,Z座標への変換のために処理される。各照射領域に対応するX及びY座標は地形表面を表す三角形であって、各々が頂点の3つの組によって規定される三角形のメッシュを生成するために三角測量によって測量される。3D描画画像を形成するために、3D画像情報(グレースケール陰影及び(または)カラーリング情報)が3つの組の各頂点によって表される座標からのレーダーエコー信号の振幅及び各頂点のZ座標の値に基づいて、メッシュの各三角形に加えられる。
(もっと読む)
移動体用レーダ及びレーダ用アンテナ
【課題】従来の車載用レーダでは、位相比較モノパルス方式の位相差特性に折り返しが発生し、必要な方位角検知範囲が得られないという問題点があった。
【解決手段】送信アレイアンテナ5、受信アレイアンテナ1、2は平面アンテナでそれぞれアンテナ素子5a〜5f、1a〜1c、2a〜2cから構成され、接地板6上に水平方向に並んで配置され、アンテナ素子1a、1b、1cの受信感度の重み付けは、最内の前記アンテナ素子もしくは素子列よりも最外のアンテナ素子もしくは素子列の方が小さい。例えば、内側から外側へ単調減少となっている。一方、受信アレイアンテナ2は、受信アレイアンテナ1、2の中間点を軸に受信アレイアンテナ1と対称になっている。
(もっと読む)
レーダ装置
【課題】ビームを高速に走査する場合にも角度精度の高い計測を実現する。
【解決手段】送信する波動を送信ビームにすると共に、観測対象とする反射物体からの反射波の到来方向を送信ビームの放射方向と一致させてビーム走査を行い、得られた反射波を受信ビームを用いて、配列した複数の受信素子のいずれかで受信し、ビーム走査速度と反射物体の仮定距離に基づいて送信ビームとその反射波の角度差を算出し、その角度差に応じて複数の受信素子の中から受信ビームを受信した受信素子のみを選択してその受信信号を得る。
(もっと読む)
21 - 40 / 62
[ Back to top ]