
Fターム[5J083AF14]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ、ソーナー)の設置 (1,005) | 移動体設置 (814) | ロボット (49)
Fターム[5J083AF14]に分類される特許
1 - 20 / 49
音源定位装置
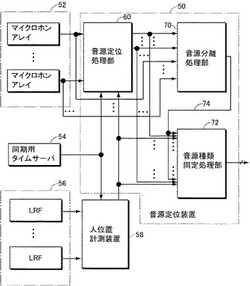
【課題】音源定位とそれら音源の属性の判定とを行なうことができる音源定位装置を提供する。
【解決手段】音源定位装置は、人の位置を検出するLRF(レーザレンジファインダ)群56と、マイクロホンアレイ群52の出力から得られる複数チャンネルの音源信号の各々と、マイクロホンアレイに含まれる各マイクロホンの間の位置関係と、LRF群56の出力とに基づいて、複数の方向の各々について、所定時間ごとにMUSICパワーを算出し、そのピークを音源位置として所定時間ごとに検出する音源定位処理部60と、マイクロホンアレイの出力信号から、音源定位処理部60により検出された音源位置からの音声信号を分離する音源分離処理部70と、分離された音声信号の属性を人位置計測装置58の出力を用いて高精度で判定する音源種類同定処理部72とを含む。
(もっと読む)
電子装置、硬さ算出方法、及びプログラム

【課題】音波を用いることにより、物体の硬さを検出する。
【解決手段】発振部110は、センサ用音波を発振する。検出部120は、物体で反射したセンサ用音波を検出する。距離算出部130は、発振部110がセンサ用音波を発振してから検出部120がセンサ用音波を検出するまでの時間に基づいて、物体までの距離を算出する。硬さ算出部140は、検出部120が検出したセンサ用音波の強度、及び距離算出部130が算出した距離に基づいて、物体の硬さを算出する。
(もっと読む)
音源方向推定装置及び音源方向推定方法
【課題】特定の種類の音源の方向を推定することができる音源方向推定装置又は音源方向推定方法を提供する。
【解決手段】音源モデル記憶部は、音源の種類の尤度を音響特徴量に対応づけて記憶し、音源同定部は、音源モデル記憶部を参照して、音響信号入力部が入力した音響信号の音響特徴量に基づき、前記音響信号の音源の種類を同定し、音源定位部は、音源同定部が同定した種類の音源の音響信号について音源方向を推定する。
(もっと読む)
音源定位装置及びコンピュータプログラム
【課題】MUSIC法を使用して安定的に音源定位を行なえる音源定位装置を提供する。
【解決手段】音源定位装置50は、マイクロホンアレイ52の出力から得られる複数チャンネルの音源信号の各々と、マイクロホンアレイ52に含まれる各マイクロホンの間の位置関係とに基づいて、3次元空間内で定義された複数の方位の各々について、MUSICアルゴリズムにより、所定時間ごとにMUSICパワーを算出するMUSIC処理部62と、複数の方位の各々について、MUSIC処理部62により時系列として得られたMUSICパワーの値の強度及びその変化量に基づいて、音源の発生から消滅までの音源の方位の変化を検出する音源推定部64とを含む。
(もっと読む)
パーティクルフィルタリングによる移動ロボットからの2次元音源地図作成方法
【課題】移動ロボット本体だけで断続的に取得したセンサデータをもとに方位単独SLAMを行うことができる2次元音源地図作成方法を提供する。
【解決手段】移動ロボットに搭載された遅延和ビームフォーミング法により最適化されたマイクアレイにより音源からの音声データを断続的に取得し、取得した音声データに対し、周波数帯域選択法を利用したパーティクルフィルタリングにより、方位単独SLAM(Bearing only Simultaneous Localization and Mapping)を行い、2次元音源地図を作成することを特徴とする。
(もっと読む)
障害物検出装置
【課題】外部からの情報の取得を不要とすることで簡易な構成としながらも、障害物の形状及び移動体と障害物との相対位置を適切に特定する。
【解決手段】障害物検出装置1は、方位が零でないと判定し、距離変化量の絶対値が第1の所定値以上であり且つ方位変化量の絶対値が第2の所定値以下であると判定すると、障害物が平面形状物体であり、車両と障害物の平面とが斜めの相対位置であると特定し、一方、距離変化量の絶対値が第1の所定値以上でない又は方位変化量の絶対値が第2の所定値以下でないと判定すると、障害物が非平面形状物体であり、その障害物の方位が零でないと特定する。
(もっと読む)
位置検出装置、位置検出方法および移動体
【課題】 複数の移動体を同時に使用する場合に、他の移動体からの超音波による影響を受けることなく、それぞれの移動体の位置を正確に検出する。
【解決手段】 移動体が、トリガ信号送信手段と、前記移動体自身のトリガ信号以外のトリガ信号を受信するトリガ信号受信手段と、前記移動体が送信するトリガ信号および超音波の送信タイミングを前記移動体固有に設定された待機時間に基づいて制御する制御手段とを備え、レシーバが、トリガ信号受信手段と、相互に離れて配置された少なくとも2つの超音波受信手段と、受信した超音波から超音波到達時点を検出し、トリガ信号を受信した時点と前記超音波到達時点とから、超音波が移動体から超音波受信手段に到達するまでの超音波伝搬時間を算出する時間算出手段と、前記超音波伝搬時間と超音波受信手段相互の間隔長に基づき移動体の位置を算出する位置算出手段とを備える。
(もっと読む)
自律移動支援システムとその制御方法
【課題】移動端末あるいは基準局から発信する無線信号を、複数の中継手段によって中継しあるいは再発信し、位置特定手段によって受信することで、前記移動端末の位置を高精度で特定できる自律移動支援システムを提供する。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
(もっと読む)
センサ固定具
【課題】複数個のセンサで形成される指向領域がつながるようにセンサを配置することを課題とする。
【解決手段】複数のセンサを固定可能な固定具であって、センサの測定動作を阻害しないようにセンサを個々に保持する保持部材と、複数の前記センサ保持部材をその上下から固定する為の挟持部材と、保持部材と挟持部材とを固定する為の連結部材とを備え、挟持部材の挟持面には、保持部材を略円周方向に配置することを規制するための溝を形成され、保持部材に溝へ挿入するための挿入部を設けるものとする。
(もっと読む)
センサ固定具
【課題】複数個のセンサで形成される指向領域がつながるようにセンサを配置すること、さらには、各センサの指向領域を所定の測定対象空間の中で同じ向きにし、センサシステムとしての測定誤差を防止することを課題とする。
【解決手段】複数のセンサを固定可能な固定具であって、センサの測定動作を阻害しないようにセンサを個々に保持する保持部材と、複数の前記保持部材をその上下から固定する為の挟持部材と、前記保持部材と挟持部材とを固定する為の連結部材とを備え、前記挟持部材の挟持面には、保持部材を略円周方向に配置することを規制するための段差部が形成され、該段差部は、前記挟持面と直交する垂直段差面を有するものとする。
(もっと読む)
位置検出装置、位置検出方法およびプログラム
【課題】被検出部周辺の環境を考慮した被検出部の音速の算出を行い、位置の検出対象とする部分付近の音速をできるだけ正確に測定し、それを用いての位置の検出精度を高める。
【解決手段】ロボットハンド101の先端部分104に超音波送信装置を配置し、さらに先端部分104を含むことが可能な多面体131〜133を設定し、それらの頂点に超音波送受信装置111〜126を配置する。先端部分104の位置検出にあたり、先端部分104に近い頂点を特定点として選択し、この特定点に向かう他の頂点からの経路の音速を算出する。この音速に基づいて、先端部分104から特定点への経路における音速を算出し、この音速の値と、先端部分104と特定点との間における超音波の伝播時間とに基づいて、先端部分104の特定点からの距離を算出する。この距離を複数の特定点について得ることで、先端部分104の位置を特定する。
(もっと読む)
位置検出装置、位置検出方法およびプログラム
【課題】被検出部周辺の環境を考慮した被検出部の音速の算出を行い、位置の検出対象とする部分付近の音速をできるだけ正確に測定し、それを用いての位置の検出精度を高める。
【解決手段】ロボットハンド101の先端部分104に超音波送信装置を配置し、さらに先端部分104を含むことが可能な多面体131〜133を設定し、それらの頂点に超音波送受信装置111〜126を配置する。先端部分104の位置検出にあたり、先端部分104に近い頂点を特定点として選択し、この特定点に向かう他の頂点からの経路の音速を算出する。この音速に基づいて、先端部分104から特定点への経路における音速を算出し、この音速の値と、先端部分104と特定点との間における超音波の伝播時間とに基づいて、先端部分104の特定点からの距離を算出する。この距離を複数の特定点について得ることで、先端部分104の位置を特定する。
(もっと読む)
位置検出装置、位置検出方法およびプログラム
【課題】被検出部周辺の環境を考慮した被検出部の音速の算出を行い、位置の検出対象とする部分付近の音速をできるだけ正確に測定し、それを用いての位置の検出精度を高める。
【解決手段】ロボットハンド101の先端部分104に超音波送信装置を配置し、さらに先端部分104を含むことが可能な多面体131〜133を設定し、それらの頂点に超音波送受信装置111〜126を配置する。先端部分104の位置検出にあたり、先端部分104に近い頂点を特定点として選択し、この特定点に向かう他の頂点からの経路の音速を算出する。この音速に基づいて、先端部分104から特定点への経路における音速を算出し、この音速の値と、先端部分104と特定点との間における超音波の伝播時間とに基づいて、先端部分104の特定点からの距離を算出する。この距離を複数の特定点について得ることで、先端部分104の位置を特定する。
(もっと読む)
周辺視野を有するセンサ、センサユニット、およびセンサの製造方法
【課題】保持部に対して浅い仰角方向から到来する波動(すなわち、周辺視野)をも検知し、広い方位角範囲で検知対象を非接触で検出することが可能なセンサ、センサユニット、及びセンサの製造方法を提供する。
【解決手段】検知対象を非接触で検出するセンサ100であって、検知対象から到来する波動を検知する検知素子102と、検知素子102の第1端102a側を保持する保持部104とを備え、検知素子102の第2端102b側は、保持部から離間する方向に変位している。
(もっと読む)
音源方向推定装置及び音源方向推定方法
【課題】定常雑音源を有するシステムにおいて、音源方向を正しく推定する。
【解決手段】固有ベクトルを用いて音源方向を推定する音源方向推定装置1は、音響信号を入力する音響信号入力手段(マイクロフォンアレイ100)と、入力された音響信号の相関行列を算出する相関行列算出手段(相関行列算出部110)と、算出された相関行列を用いて相関行列の固有ベクトルを求める固有ベクトル算出手段(固有ベクトル算出部120)とを備え、固有ベクトル算出手段は、入力信号の相関行列と、1以上の所定の相関行列とを用いて固有ベクトルの算出を行う。
(もっと読む)
アレイ型センサの校正システム、方法及びプログラム
【課題】脱着可能な複数のセンサを備えるシステムにおいてセンサの配置を変更した場合であっても適切に信号処理の内容を校正することを可能にする。
【解決手段】センサユニット2が備えるセンサ部品、ステレオカメラユニット3が備える装着型ビデオカメラは、いずれも個別に脱着可能な部品として構成されている。また、センサ部品の構成情報を取得する配置情報取得手段31と、取得した構成情報に応じて信号処理の内容を変更する信号処理制御手段32と、を有する。
(もっと読む)
音声認識装置、ロボット、音声認識方法、プログラム及び記録媒体
【課題】音声認識の精度を向上させる音声認識装置、ロボット、音声認識方法、プログラム及び記録媒体を提供する。
【解決手段】音声を入力する音声入力手段と、入力された音声の到来方向を検出し、音源方向検出結果を出力する音源方向検出手段と、入力された音声に発話区間を検出し、発話区間に対し認識処理を行い、音声認識結果を出力する音声認識手段と、音声認識手段が音声検出中であるか否かを出力する音声検出状態取得手段と、音声検出中でない場合は音源方向検出手段から出力された音源方向検出結果を出力し、音声検出中である場合は音声検出中でなくなるまで音源方向検出結果の出力を抑制する出力判定手段と、出力判定手段から出力された音源方向検出結果、若しくは音声認識手段から出力された音声認識結果の少なくともいずれかに従って動作を行う動作手段と、を備えることを特徴とする。
(もっと読む)
音源定位装置
【課題】MUSIC法を使用して安定的に音源定位を行なうことができる音源定位装置を提供する。
【解決手段】音源定位装置は、複数チャンネルの音源信号の各々を、200msごとにFFT変換し、周波数帯域ごとに空間相関行列を算出して固有値分解し、複数個の周波数帯域の各々について固有ベクトル及び固有値を算出する固有ベクトル算出部と、この固有値に基づき、第1及び第2の周波数範囲についての固有値プロファイルを算出する第1及び第2の平均値算出部120及び122と、これら固有値プロファイルの組をパラメータとして音源数をk分類法により推定するKNN分類器124と、KNN分類器124により推定された音源数と、マイクロホン素子の配置に関する情報と、固有ベクトルとに基づいて、MUSIC法により音源数と等しい数の音源方位を推定する音源推定部とを含む
(もっと読む)
物体検出装置
【課題】 検出可能な物体が限定されず、かつ、物体の位置を検出することのできる物体検出装置を実現する。
【解決手段】 送信波を送信する素子Dと、反射波を受信する素子A,B,Cと、を有する超音波センサ21〜24がリヤバンパ7に配列されている。超音波センサ21が送信波を送信した場合に、超音波センサ22〜24に設けられた素子A,Bの指向性を広角に制御する。送信時間と受信時間との時間差によって障害物までの距離を求める。また、受信信号の素子A,Bにおける位相差によって障害物Pの水平方位を求め、素子A,Cにおける位相差によって垂直方位を求める。これにより、反射波の受信範囲が広がるので障害物の検出範囲を広げることができる。また、障害物の水平方向および垂直方向の位置を検出することができるため障害物の位置を高精度で検出することができる。
(もっと読む)
音源方向検出方法、装置及びプログラム
【課題】受音手段対毎に異なる検出性能の影響を軽減し、高精度で音源方向を検出可能な音源方向検出方法を提供する。
【解決手段】複数の受音手段対5、15、25毎に音源から受音手段対を構成する2つの受音手段に音波が到達する時間差を求め、受音手段対間の距離等に基づき受音手段対毎に信頼度を求める。次いで、複数の受音手段対毎に時間差に基づき音源方向候補を求める。そして、複数の受音手段対毎に得られた音源方向候補同士の差が最小となる音源方向候補の組み合わせを選択し、更に、選択した2つの音源方向候補のうち信頼度が高い受音手段対により求まった音源方向候補を最終の音源方向として決定する。
(もっと読む)
1 - 20 / 49
[ Back to top ]