
Fターム[5J083DC01]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | マッピング、イメージング (169) | マッピング (64)
Fターム[5J083DC01]の下位に属するFターム
開口合成を用いるもの (32)
Fターム[5J083DC01]に分類される特許
21 - 32 / 32
自律走行装置

【課題】測定誤差をなくし、より正確に測定対象物の距離を知ることができる自律走行装置を提供することを目的とする。
【解決手段】超音波センサを有する複数のセンサ手段4、5と、センサ手段4、5のセンサ値を入力として測定対象物1の距離を測定する距離測定手段7、8と、走行装置Aの速度を測定する速度測定手段20と、距離測定手段7、8の距離と速度測定手段20の速度を入力として測定対象物領域を確定する測定対象物領域確定手段10とを備えたものである。これによって、測定時間に相当する距離を補正するので、より正確に測定対象物1の距離を知ることができる。
(もっと読む)
物体認識装置

【課題】少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識装置を提供する。
【解決手段】物体検出手段1によって検出された表面形状情報に基づいて物体の輪郭形状を認識する形状認識手段2を備えた物体認識装置であって、下記特徴を有する。形状認識手段2は、最大で規定回数分、表面形状情報を構成する標本群から任意の標本を抽出し、抽出された標本に基づいて形状モデルを定める形状モデル設定手段3と、標本群に対する各形状モデルの適合度を演算する適合度演算手段4と、形状モデルに対する適合度に基づいて輪郭形状となる形状モデルを決定する輪郭形状決定手段5と、を備える。輪郭形状決定手段5は、第一基準値以上の適合度が存在する場合は、規定回数に拘らず最先に第一基準値以上となった適合度を有する形状モデルを輪郭形状として決定する。
(もっと読む)
河川データ測定方法及び装置
【課題】 測定装置を搭載した浮揚体の移動量の計測精度低下を防ぐ。
【解決手段】 超音波送受信器301から河底方向に所定の時間間隔で超音波を発信し、河底で散乱・反射された超音波を2次元状に配置された2次元超音波検出器303で受信し、超音波送受信器301から時間をおいて発信された2回の超音波それぞれに対応する2次元超音波検出器303の出力に基づいて河底からの反射波の強度分布と位相分布を信号処理装置304で求め、信号解析装置305で、信号処理装置304から出力される二つの強度分布と位相分布それぞれの間の相関の強度を、前記2つの強度分布、位相分布のうち、先に発信された超音波に対応するものを他方に近づけつつ移動距離の関数として求め、相関の強度が最大となる移動距離及びそのときの移動方向を前記2回の超音波発信の間の測定装置の移動距離及び移動方向とする。
(もっと読む)
複数の剪断波を用いる撮像方法および装置
本発明の撮像方法は、剪断成分と圧縮成分とを含む力学波を粘弾性媒体内で発生させ、粘弾性媒体の運動パラメータを力学波の伝搬中にさまざまな点で求めることにある。本方法は、力学波の圧縮成分による誤差を取り除くように運動パラメータが処理される修正段階を含む。 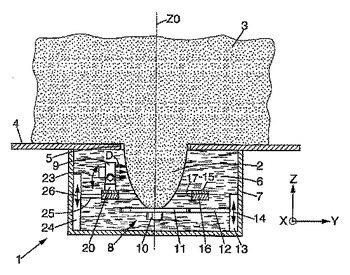 (もっと読む)
(もっと読む)
音響対象物画像化装置及び方法、対応するコンピュータプログラム製品、及び対応するコンピュータで読み取り自在な記憶媒体
本発明は、測定対象物の参照画像と関連付けられた、音響セットの助けを借りて、音響カードを利用することにより、音響対象物を画像化する装置、及びその方法に関する。また、本発明は、情報プログラム製品、及び、対応するコンピュータで読み取り自在であり、かつ、特に、写真を文書化、フィルムを文書化する際に、及び、機械、装置、乗り物等のノイズ発生箇所を音響分析する際に使用する、記憶媒体に関する。この目的のために、アコースティックカメラを使用する。このカメラは、ビデオカメラ一体型の、マイクロホン集合体、マイクロホン及び角度センサに連結したデータ記録装置、キャリブレーション装置、及びコンピュータから構成される。カメラが記録した写真を、時間依存型同期信号と関連を持たせたマイクロホンの時間関数の記録と共に、また、状況、マイクロホンパラメータのファイル、及びデータ記録装置に関するあらゆる情報と共に、データフレーム中に記録し、分離できないように一体化する形で、このビデオカメラが、各測定物を自動で文書化することが出来る。時間関数、周波数関数、音圧、座標、音質、又は、公知の時間関数との相関関係を、音響画像の各点に関して、該点上でマウスをクリックすることにより、また、マウスの右ボタンにより呼び出されたメニューにより呼び出すことが出来る。前記アコースティックカメラには、スケールカラーの最大値及び最小値を適宜プリセットするために、種々の方法(absolute、relative、manual、minus_Delta、Lin/Log、all、effective value、peak)を選択することが出来る音響彩飾等の、他のファンクションも設けられている。 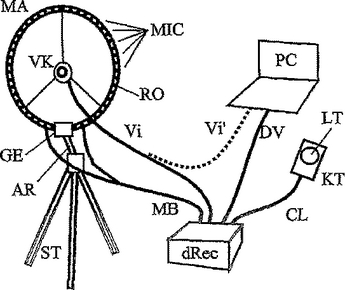 (もっと読む)
(もっと読む)
非破壊試験用探針の位置測定
標準的な非破壊試験用の探針(4)は、いつでも分析される表面(1)における装置(4)の位置を測定するために、本発明による位置測定システム(10)と結合される。前記位置測定システム(10)は、超音波の放射源(12)と、前記放射源(12)と受信器(14,16)との間の距離を測定するための手段と結合された2つの超音波受信器(14,16)とを備え、各構成要素は互いに相対的に自由に移動可能である。前記放射源(12)と前記探針(4)との間の結合は三角測量によって測定された前記探針(4)の位置決定を可能とする。配置およびマッピングの方法も開示される。 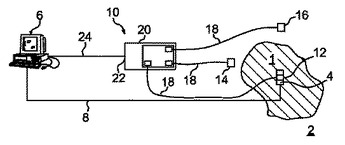 (もっと読む)
(もっと読む)
貯蔵庫の内容物の高さを測定するシステムと方法
本発明の貯蔵庫の内容物の高さを測定するシステムは、音響パルスを、前記内容物の上部表面に向けて送信する音響パルス送信器と、前記パルスのエコーを受領し、エコーに応じて信号を生成する、同一線上にない受信器のアレイと、対応する測定された距離に沿って上部表面からアレイに送信されたパルス信号の到着方向を計算する処理装置とを有する。トランシーバは、受信器と送信器の両方の機能を果たす。本発明のシステムは、信号に応答してパルスの形状を最適化するリピータとパルス成型器を有する。複数の測定された距離が、上部表面のマップを形成し、ビンの内容物の量を予測する。  (もっと読む)
(もっと読む)
チャンネルインパルス応答の推定方法
時間に依存するチャンネルのインパルス応答を推定するために、超音波信号等の連続的なインパルス信号が送信され、上記チャンネルから受信される対応する信号がサンプリングされる。インパルス信号の行列の逆行列が計算され、上記受信信号のサンプルへ適用される。 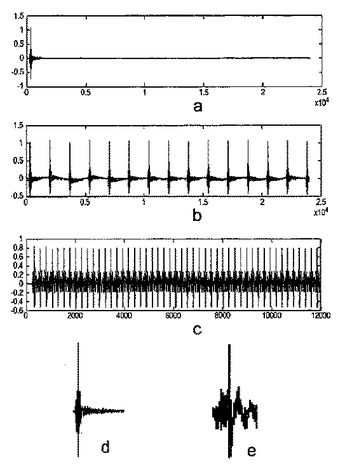 (もっと読む)
(もっと読む)
底質探知装置
【課題】マルチビーム方式を用いて、正確に底質を推定することができる底質探知装置を提供する。
【解決手段】底質探知装置は、受信した超音波反射信号から水深データDPと反射強度データDRとを得て(S1)、この実測の反射強度データDRから水深による影響を除去して、反射面積による影響のみを残す反射強度データSSAを算出する(S2)。次に、底質探知装置はこの反射強度データSSAに対応する海底面の法線ベクトルを算出して、超音波信号の入射角および海底面の反射面積S(A)を算出する(S5→S6)。次に、底質探知装置は反射強度データSSAと反射面積S(A)とから余角方向の反射強度データSSを算出し、法線方向の反射強度データSS90に変換する(S7→S8)。そして、底質探知装置は、法線方向の反射強度データSSから底質を推定する(S10)。
(もっと読む)
水中探知装置
【課題】水中の様子を3次元的に容易かつ正確に認識できる水中探知装置を提供する。
【解決手段】水平モードおよび垂直モードでのスキャンにより得られたエコーのデータから3次元のエコー表示データを生成し、このエコー表示データに基づいて、表示画面17a上に3次元の魚群映像34を立体的に表示する。また、魚群映像34に加えて、水平モードでの傘形ビームのスキャン領域32、垂直モードでの扇形ビームのスキャン領域33、海底地形映像35、等深度線36などの3次元映像を立体的に表示する。
(もっと読む)
ソーナー方法及び水中画像ソーナー
【課題】 受波した周波数の組をマトリックス状にデマッピングし、受信ビーム方向とすることによりデータ処理量を削減する。
【解決手段】 送波器4は、周波数帯が割り当てられた水平/垂直の各1列から成るクロスファンビーム方式で構成される。送信制御部1は、送波音の送信ビーム方向をマトリックス状に走査させると共に、走査に同期して送波音の周波数を漸次連続的に制御する。受波器5は、周波数帯の異なる2つの無指向性受波器で構成される。乗算器9は、各周波数帯別の信号を乗算する。帯域制限器10は、乗算器9出力の高域信号を出力する。FFT11は、帯域制限器10出力より周波数成分を分別する。目標検出部12は、受信信号のレベルに応じて、色もしくは濃淡情報に変換し、分別された各周波数成分に対応する送信ビーム方向を基に画像を生成する。
(もっと読む)
ドップラー受信ビーム生成器システムのための方法とシステム
【課題】ドプラモード用に広いダイナミックレンジを備え、かつ安価な回路を備える超音波受信装置を提供する。
【解決手段】超音波受信装置は、2つの受信ビーム生成器を備える。第1の結像受信ビーム生成器は、超音波受信素子からのアナログ信号に応答し、第1のビーム生成出力信号を生成する。第2の非結像受信ビーム生成器は、上記アナログ信号に応答し、第2のビーム生成出力信号を生成する。第2の非結像ビーム生成器は、各々のチャンネルがそれぞれのアナログ信号を復調する復調器を有する複数の処理チャンネルと、それぞれのベースバンド信号を位相調整する位相回転器とを備える。第2の非結像ビーム生成器は、前記位相調整されたベースバンド信号を使用して前記第2のビーム生成出力信号を生成する。
(もっと読む)
21 - 32 / 32
[ Back to top ]