
Fターム[5J084BA12]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | ビームパワーに関するもの (55)
Fターム[5J084BA12]に分類される特許
1 - 20 / 55
距離測定装置

【課題】距離測定装置において、比較的小型の構成で受光効率を向上して比較的広い距離検出範囲で距離を測定可能とすることを目的とする。
【解決手段】2次元スキャナおよび投光角拡大レンズを含み投光ビームを前方に投光する投光系と、投光系のビーム走査角度と同等以上の受光視野角を有すると共に受光に関する第1の光路が投光角拡大レンズの投光に関する第2の光路と独立しており投光角拡大レンズより前方、且つ、投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えるように構成する。
(もっと読む)
距離画像生成装置

【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
物体検出装置および情報取得装置
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】1つ以上の物体までの距離や表面反射率に関わらず、距離画像のほぼ全体にわたって良好な距離精度を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】発光部11と、反射光が戻るまでの時間から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、露出調節部13と、露出を段階的に変更しながら撮像した複数の距離画像において、同一の画素位置に対応する各画素の距離情報の重み付き平均値をそれぞれ算出するとともに、そうして算出された重み付き平均値を各画素の距離情報とするように合成した合成距離画像を求める演算制御部15とを備え、各画素は前記反射光の受光強度を示す受光レベル情報も有し、各画素の距離情報の重み付き平均値の算出では、その画素の前記受光レベル情報に応じて前記距離情報の精度に対応するように算出される重み付け係数が用いられる。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
位置検出システム及び投射型表示システム
【課題】複数の検出対象物の位置をそれぞれ検出することができる光学式の位置検出システムを提供する。
【解決手段】光学式の位置検出システム1000は、第1検出対象物31と第2検出対象物32とに向けて光を射出する光射出部20と、波長の異なる第1検出対象物31からの第1反射光41を受光する第1受光部51と第2検出対象物32からの第2反射光42を受光する第2受光部52を有し、前記第1検出対象物31は前記第1反射光41を反射する第1反射フィルター61を有し、前記第2検出対象物32は前記第2反射光42を反射する第2反射フィルター62を有する。
(もっと読む)
障害物検知装置
【課題】表面状態の検出を可能とし得て、しかも、障害物とレーザとの間に設けた出射面の表面状態をリアルタイムに検出することができ、その表面状態に対応したレーザ光を照射する障害物検知装置を提供する。
【解決手段】本発明は、レーザ光源2と、レーザ駆動部3と、レーザ光源2から照射されたレーザ光をビーム偏向するビーム偏向素子4と、電圧制御部5と、出射面9と、受光面10と、検出器7と、コントロール部6と、を備え、ビーム偏向素子4の偏向角の一部のレーザ光を利用して出射面9の表面状態を計測するように出射面9に対して斜めから入射する反射ミラー11,12,13と、出射面9で反射したレーザ光を受光する検出器8と、を備え、コントロール部6は、電圧制御部5での電圧制御により出射面9の表面状態を計測した後に出射面9を透過する前方検出用のレーザ光を出力する。
(もっと読む)
レーザレーダ装置と出射調整方法
【課題】天候の急変にも即時に追随して人体に障害を与えることなく位置計測が可能なレーザレーダ装置を提供することが目的である。
【解決手段】天候の急変にも即時に追随して、対象物31での第一のレーザ光12Aおよび第二のレーザ光12Bの強度を所定の強度以下になるように、前記第一のレーザ光12Aおよび前記第二のレーザ光12Bの出射強度を調整するレーザレーダ装置1と出射調整方法を提供する。
(もっと読む)
光走査装置及び距離測定装置
【課題】反射面を備えた回転反射体の回転軸の傾斜角φが0°の場合に比べて、反射面で反射された走査光による走査軌跡をより柔軟に設定することができる、光走査装置及び距離測定装置を提供する。
【解決手段】基準方向及び基準方向と直交する方向とは異なる方向に光を射出する光源と、回転軸に斜めに交差し且つ光源から入射角θで入射した光を反射する少なくとも1つの反射面を有し、基準方向に対し傾斜角φで傾けられた回転軸の周りに回転する回転反射体と、を備えた光走査装置である。基準方向と予め定めた角度で交差する方向を所定の走査方向として、回転軸の傾斜角φ≠0°で、且つ反射面で反射された走査光の所定の走査方向に対する偏差が回転軸の傾斜角φ=0°で得られる走査光の所定の走査方向に対する偏差より小さくなるように入射角θに応じて前記傾斜角φが予め設定されている。
(もっと読む)
レーザーの試験をすることに光学的なアイソレーターを使用するためのシステム及び方法
一つの実施形態に従った、方法は、パルス検出器で第一の光学的な信号を受信することを含む。第一の光学的な信号の電子的なパルスは、光学的なモジュールで受信される。第二の光学的な信号は、電子的なパルスに基づいた光学的なモジュールで発生させられる。第一の光学的な信号の少なくとも一部分は、光学的なイソレーターで逆の方向において受信されると共に、第二の光学的な信号は、光学的なアイソレーターで前進の方向において受信される。光学的なアイソレーターは、実質的に、前進の方向においてターゲットまで第二の光学的な信号を送信する。光学的なアイソレーターは、実質的に、逆の方向において第一の光学的な信号の少なくとも一部分を減衰させる。 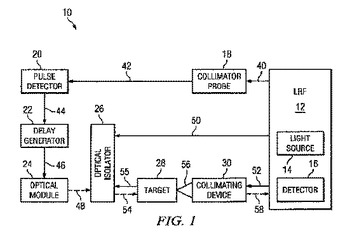 (もっと読む)
(もっと読む)
光走査装置、レーザレーダ装置、及び光走査方法
【課題】広角度の視野領域の全範囲において感度を一定に保持することができる光走査装置、レーザレーダ装置、及び光走査方法を提供する。
【解決手段】水平方向に対して予め定めた傾斜角度で交差するように配置された透明平板を通してレーザ光を走査する場合に、光源から射出されたレーザ光を水平方向に走査すると共に、光源から射出されたレーザ光の偏光面を透明平板の傾斜角度及び水平方向の方位角に応じて回転させて、偏向されたレーザ光を透明平板側に出力し、透明平板を通してレーザ光を走査する。
(もっと読む)
光測距装置
【課題】人間の眼の保護を図りながら、測距動作を継続できる光測距装置を提供する。
【解決手段】測距モードとして、安全モードと高精度モードとを備える。前記安全モードは、被曝放出レベルが最大許容露光レベルMPEよりも小さくなる「レーザ製品の安全基準」(JIS C 6802)のクラス1に相当するモードである。一方、高精度モードは、安全モードに比べてレーザ投光頻度を上げたり、走査振幅を絞ったりするなどの設定により、被曝放出レベルが最大許容露光レベルより高い、安全基準のクラス3Rに相当するモードである。ここで、測距動作で得た距離のデータと反射光量のデータとから、至近距離に人間の眼が存在することが検出された場合、高精度モードによるレーザ放射を停止させ、安全モードでレーザ放射を行わせる。
(もっと読む)
情報処理装置および物体検出方法
【課題】1組の発光素子および受光素子で、物体の存在有無に加えて、物体の距離を検出することを実現した情報処理装置を提供する。
【解決手段】近接センサ25は、1組みの発光素子251および受光素子252によって構成される。レギュレータ25Aは、制御信号に基づき、発光素子251に供給される駆動電力の電圧値を制御する。このレギュレータ25Aを介して、発光素子251の発光光量を所定の周期内において時分割で多段階に切り替え、この切り替えと同期を取って、この所定の周期内における受光素子252による反射光の受光状況を当該受光素子252が出力する検出信号を監視することにより検出し、その検出結果に基づき、物体の存在有無に加えて、物体の距離を多段階に検出する。
(もっと読む)
周波数量子もつれ光子の生成及び検出
紫外線レーザはコヒーレント光を発生し、このコヒーレント光は下方変換されて周波数量子もつれ光子を生成する。量子もつれ光子の各対に関して、第1光子は第1光路に沿って、第2光子は第2光路に沿って、それぞれ伝送される。第1検出器は、第1光路に沿って伝送されるこれらの光子を検出し、第2検出器は、第2光路に沿って伝送されるこれらの光子を検出する。この検出は、シングルフォトン領域で行なわれる。同時計数を検出器の出力に対して行ない、この同時計数には、第1及び第2検出器の出力の立ち上がりエッジを時間窓内で比較することが含まれる。  (もっと読む)
(もっと読む)
距離測定装置
【課題】ターゲットからの複数の散乱光を受光して距離を測定する場合にカウンタ数が多くなり演算処理が複雑化する。
【解決手段】コンパレータ1はレーザ光に伴う送光パルスからスタートパルスを生成し、コンパレータ2はN個のターゲットからの各受光パルスを2値化しNビットデータとして出力する。測距回路5はスタートパルスとNビットデータの内で一番早く“1”となるストップパルス間の時間を計測し基準時間として出力する。遅延線6はターゲットに対する所望の遅延ステップでストップパルスを遅延させた遅延パルスを距離分解能対応の数Mだけ出力する。ラッチ回路7はNビットデータをストップパルスおとび各遅延パルスでラッチし遅延データとして出力する。
(もっと読む)
レーザ距離測定装置
【課題】レーザ距離測定装置において、正確な距離補正を行い得る構成を、装置構成の大型化、検出性能の低下を招くことなく実現する。
【解決手段】レーザ距離測定装置1には拡散反射部材80が設けられ、偏向部41が第1回動位置にあるときに、レーザ光の投射から第1拡散反射光がフォトダイオード20によって検出されるまでの時間(第1時間T1)を検出し、偏向部41第2回動位置にあるときにも、レーザ光の投射から第2拡散反射光が検出されるまでの時間(第2時間T2)を検出している。そして、それら第1時間T1及び第2時間T2に基づいて距離算出に用いる補正データを生成している。更に、第1回動位置のときにレーザ光が拡散反射面に入射するときの第1入射角θ1と、第2回動位置のときにレーザ光が拡散反射面に入射するときの第2入射角θ2とが異なるように構成されている。
(もっと読む)
ゲート3Dカメラ
場面までの距離を判定するカメラ。このカメラは、特性スペクトルを有する光のパルス列で場面を照明するように制御可能なVCSELと、感光面と、場面によって光パルスから反射された光を感光面上に撮像する光学素子と、スペクトルにおける光に対して、感光面を選択的にオンおよびオフにゲートするように動作可能なシャッターとを備えている。 (もっと読む)
レーザレーダ制御装置
【課題】レーザ光が人間の眼に与える影響をより小さくして安全性をより向上させることができるレーザレーダ制御装置を提供する。
【解決手段】自車両Cの車体表面の底部Bに設けられレーザ光Lを周囲に照射して反射光を検出する照射検出部10と、自車両Cの前方に存在する前方道路Rの勾配変化の有無を検出する勾配検出部20と、勾配検出部20によって勾配変化が検出された場合に、照射検出部10によって照射されるレーザ光Lの照射出力を抑制する出力制御部30と、を備える。前方道路Rの勾配変化が検出された場合に、レーザ光Lの照射出力が抑制されるため、前方道路Rが上り坂または下り坂になっているといったように勾配変化があってこの前方道路Rに人間Hが存在している状況では、レーザ光Lが人間Hの眼に与える影響をより小さくして安全性をより向上させることができる。
(もっと読む)
レーザー照射装置
【課題】 従来、電波センサーでは低高度を接近する目標を捕捉することが難しく、光学センサーでは遠距離の脅威を捕捉することが難しいため、低高度及び超音速で接近してくる目標を遠距離で対処することができないという問題があった。
【解決手段】 高出力連続波レーザー光をパルス変換器によってパルス化し、レーザー放射器から遠方より接近する目標に対してパルス化されたレーザー光を照射して、反射レーザー光を光学センサーで受信する。この受信信号の解析情報を元にレーザー放射器を駆動して目標を追尾し、目標が所定距離に接近した際にパルス動作を停止して、追尾目標に対し高出力連続波レーザ光を照射することにより、低高度目標に対して遠距離で対処することができる。
(もっと読む)
1 - 20 / 55
[ Back to top ]