
Fターム[5J084BB06]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | レンズ (825) | フレネルレンズ (21)
Fターム[5J084BB06]に分類される特許
1 - 20 / 21
光走査装置及びレーザレーダ装置
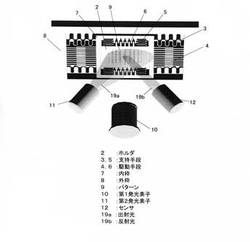
【課題】精度高く正確に走査光の走査量を測定することができるとともに、小型化が可能で、かつ安価な光走査装置、及びレーザレーダ装置を提供する。
【解決手段】 光学素子1と、ホルダ2と、ホルダ2を移動可能に支持する支持手段3,5と、ホルダ2を光学素子1の光軸に垂直な方向に移動させる駆動手段4,6と、光学素子1を透過する第1の波長の光を発光する第1発光素子10、及び光学素子1を透過しない第2の波長の光を発光する第2発光素子11からなる発光素子を備え、
ホルダ2に、第2の波長の光を透過しない構造体からなるパターン9が形成され、
第2の発光波長を感知するセンサ12をさらに備え、
センサ12は、反射された光を受光可能な位置に配置され、かつ第1発光素子10と、第2発光素子11と、センサ12とが、相対的に固定された位置に配置されていることを特徴とする光走査装置、及びレーザレーダ装置。
(もっと読む)
パルス光による光学式距離計

飛行時間測定に基づいた光学式距離計は、オブジェクト(70)に向ってパルス光を照射し、オブジェクトからの反射光を受信し、受信器はフォトンカウントモードで動作して検出されたフォトンに対してパルスを生成する。受信器上でフォトン検出の可変確率が存在し、且つ、コントローラ(370、380、390;365、470、475、380、390;570、580、590、390)は光レベルに基づいて、受信器のフォトン検出確率を制御する。光レベルに基づいて検出確率を制御することによって、光学部品を使用する経費を伴うことなく、受信器は増加したダイナミックレンジを有する。これは、検出確率が制御される間、受信器がフォトンカウントモードにあるので、非常に弱い信号を検出する間であっても適用することができる。光レベルは受信器自身の出力によって、或いは受信器の外部の別の検出器によって、表すことができる。 (もっと読む)
送受信一体型光学装置
【課題】送信光学系及び受信光学系の同一視野内に目標を捕らえることが可能な送受信一体型光学装置を得る。
【解決手段】レーザ光を発生するレーザ光源1と、このレーザ光源1から出射したレーザ光を目標へ照射するとともに、目標からの反射光を集光する集光レンズ2又は回折レンズ6と、目標からの反射光を受光する受光センサ4とを備え、集光レンズ2又は回折レンズ6は、透過型グレーティング構造部3、反射型グレーティング構造部7、回折レンズ構造部8、プリズム構造部9、ミラー構造部10、あるいはスリット構造部11を持つものである。
(もっと読む)
距離センサを備えるセンサ装置
光源を伴う少なくとも1つの送信機を有する送信デバイス(2)及び少なくとも1つの受信機を有する受信デバイス(3)からなる距離センサを備え、また電子ユニットを備えるセンサ装置(17)が提案される。電子ユニットは、送信機によって光を放出するように構成され、送信機によって放出される光によってカバーされる、監視領域内の対象物の反射表面から各受信機までの、距離を確定するように構成されている。本発明によれば、光を送出する光ガイド手段(18〜23)は、送信デバイス(2)と監視領域との間、及び/又は監視領域と受信デバイス(3)との間に配置され、光ガイド手段は、送信デバイス(2)から監視領域まで、及び/又は監視領域から受信デバイス(3)まで、曲がった経路を光が通過できるように、光を少なくとも1回反射させる。  (もっと読む)
(もっと読む)
画像取得装置及び方法
【課題】対象物との距離に依存しない対象物の画像を取得することが可能な画像取得装置及び方法を提供する。
【解決手段】投光部20は、投光期間に対象物Oへパルス光を繰り返し照射し、投光休止期間に対象物Oへのパルス光の照射を休止して、各アバランシェフォトダイオード332の周辺回路333aは、投光休止期間に対象物Oから受光した光の強度を求め、投光部20がパルス光を照射した時刻と反射パルス光を受光した時刻との時間差に基づいて対象物Oまでの距離を算出するための読み出し回路に接続されている。これにより、各アバランシェフォトダイオード332は、投光休止期間において受光する光の強度に投光部20が照射したパルス光の反射光L2の成分が含まれないことになり、対象物Oとの距離に依存しない対象物Oの画像を取得することが可能となる。
(もっと読む)
光学式測距装置及び方法
【課題】外乱光が多く且つ変動する環境においても不要な測定を減少させて正しく動作する光学式測距装置及び方法を提供する。
【解決手段】ヒストグラム回路337が、投光部20のパルス光投光時間とアバランシェフォトダイオード332のパルス光受光時間との時間差を繰り返し計測して時間差のヒストグラムを作成し、信号処理回路338が、ヒストグラム回路337が作成したヒストグラムの極大値に基づいて対象物までの距離を算出する3Dカメラ10において、信号処理回路338は、ヒストグラム回路337が作成したヒストグラムの信頼度を算出し、算出したヒストグラムの信頼度が閾値以上である場合に、ヒストグラム回路337にヒストグラムの作成を停止させる。これにより、外乱光が多く且つ変動する環境でも、ヒストグラムの信頼度が高いときにヒストグラムの作成を停止し、不要な測定及び演算を減らす。
(もっと読む)
光学式測距センサおよび電子機器
【課題】小型化され、かつ、計測の精度が高い光学式測距センサおよび該センサを含む電子機器を安価で提供する。
【解決手段】光学式測距センサは、発光素子と同一平面上に設けられた受光素子2を備える。受光素子2は、複数のセル21Aを有し、発光素子1から放射され被測定物で反射した光が集光される受光部21と、受光部21における所定の位置を記憶するフラッシュメモリ部25と、複数のセル21Aによる上記光の検出結果に基づいて、受光部21における上記光の集光位置を検出するとともに、フラッシュメモリ部25に記憶された所定の位置と受光部21における上記光の集光位置との相対的な位置関係に基づいて、被測定物までの距離を計測する信号処理回路部22とを含む。
(もっと読む)
船舶の航路上の物体の検知と画像化のシステム
高速船舶及び他の船舶の航路内の物体(16)の検知と画像化及び、航海安全にリスクとなる物体の警告システムであって、船舶は航行及び通信システム(28)を備え、物体のレーザ照明用の走査ユニット(10)、制御ユニット(11)、オペレータパネル(12)を有する。走査ユニットは、システムの視野の内にレーザビーム(33)を放出するように調整された目に安全な赤外レーザの光源(30)と、レーザビームの出力パワーの監視と、物体までの距離の測定用のトリガパルスの生成と、反射放射エネルギーを受信/検知し、物体との距離を放射光と反射光の時間差に基づいて計測し、パルスエネルギーとピーク効果を計測し、第1(19)と第2(20)の走査機構により、レーザビームと光学検知器(38)の瞬時の視野を問題の走査領域に亘って走査し、船舶に対する瞬時の放射方向に関する方向情報を獲得する。 (もっと読む)
レーザレーダ用光学部材駆動機構
【課題】レーザレーダ用光学部材駆動機構の性能を向上させる。
【解決手段】光学部材6,7と、光学部材6,7が取り付けられる光学部材装備部11とを有する光学部材一体部10と、光学部材一体部10を支える第一の架設部材15A,15B,15C,15D,15E,15F,15G,15H,15I,15J,15K,15Lと、第一の架設部材15A,15B,15C,15D,15E,15F,15G,15H,15I,15J,15K,15Lが連結される中継部20と、中継部20を支える第二の架設部材25A,25B,25C,25D,25E,25F,25G,25Hと、第二の架設部材25A,25B,25C,25D/25E,25F,25G,25Hが連結される固定部30A/30Bとを少なくとも備えるレーザレーダ用光学部材駆動機構1を構成することにより、レーザレーダ用光学部材駆動機構1の性能を向上させることができる。
(もっと読む)
光スキャナ装置
【課題】発生加速度を大きくすることなく、測定に用いる光を照射する時間の比率を高くし、無駄時間を少なくした光スキャナ装置を提供することである。
【解決手段】光学系駆動装置25は、レンズ34、35、36、38と、該レンズ34、38を備えたホルダ61と、該ホルダ61をレンズ34、38の光軸に垂直方向に移動可能に支持するワイヤバネ108と、前記ホルダ61をレンズ34、38の光軸に垂直方向に駆動する2軸アクチュエータ備えている。前記レンズ38は、その光軸に垂直な第1の方向に移動したときにレンズ38を通る光が該レンズ38の移動方向と同一に走査する。前記レンズ34は、前記第1の方向に移動したときにレンズ34を通る光が該レンズ34の移動方向と反対の向きに走査する。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】レンズ駆動方式のビーム照射装置およびレーザレーダにおいて、安全かつ簡素な処理にて円滑にスキャン位置を検出できるようにする。
【解決手段】走査レンズ14と一体的に移動するよう光透過型もしくは光反射型のスケール16を配する。半導体レーザ101から出射されるサーボ光をスケール16に照射する。スケール16を経由した後のサーボ光をPD103で受光する。スケール16は、X軸方向における走査レンズ14の変位位置を検出するための第1の光変調パターン(位置検出用パターン)を有する。
(もっと読む)
物体検知装置
【課題】基準走査方向に存在する物体の検知可能距離を確保し、かつこの基準走査方向から外れた位置に存在する物体の検知能力を確保することができる物体検知装置を提供する。
【解決手段】レーダ装置1は、水平方向に分割した検知領域毎に、その検知領域における存在を検知したい物体の距離範囲に応じて垂直方向の走査範囲を変化させる。例えば、水平方向における基準走査方向を正面前方に決定している場合、この基準走査方向から離れるにつれて、レーザ光の垂直走査範囲を大きくする。これにより、レーダ装置1は、水平方向における走査角度毎に、その走査角度において、存在を検知したい物体の距離範囲で、垂直方向におけるレーザ光の照射範囲をほぼ同じにする。
(もっと読む)
車載装置
【課題】道路標識、特に一時停止や進入禁止にかかる道路標識の判別が行え、安価で、かつ搭載された車両の燃料消費量の増大が抑えられる車載装置を提供する。
【解決手段】車載装置1は、レーダユニット2が道路標識である可能性が高い物体を検出すると、画像処理ユニット3が撮像画像から、この道路標識である可能性が高い物体が撮像されている部分を切り出す。そして、切り出した部分の画像について、画像処理を行い、当該物体が道路標識であるかどうかを検知する。
(もっと読む)
光波距離計
【課題】近距離から遠距離に亘って広い測定レンジを有しながら、低コストであって小型化が可能な光波距離計を提供する。
【解決手段】測定光30を出射する発光素子11と、測定光30を平行光にする投光光学素子15と、入射光を反射光と透過光に分離する光分離面181と、光分離面181を透過した測定光30を、測定対象物21へ到達するように反射させる光反射面182と、帰還光32が光分離面181で反射した第一帰還光321と、帰還光32が光反射面182で反射した第二帰還光322を受光し、集光して出射する受光光学素子16と、受光光学素子16によって集光された光を電気信号に変換する受光素子12とを備え、光分離面181に光を入射させた場合、光分離面181で反射される光の強度は、光分離面181を透過した後に光反射面182で反射される光の強度よりも低いことを特徴とする。
(もっと読む)
測距装置
【課題】物体までの距離が短いか、長いかにかかわらず、当該物体までの距離の計測が精度よく行える測距装置を提供する。
【解決手段】測距装置1は、物体までの距離が長いときには、LD3aがレーザ光を発信してから、PD4aが反射光を受光するまでの経過時間を計測し、この経過時間に基づいてLD3aが発信したレーザ光を反射した物体までの距離を計測する。一方、物体までの距離が短いときには、画像処理部8から入力された、撮像画像における、撮像レンズの光軸位置と、LD3aから発信されたレーザ光の照射位置と、の相対的な位置関係から、物体までの距離を算出する。
(もっと読む)
光学デバイスおよび電子機器
【課題】小型化を図ることができると共に被検出物の検出時間を短縮できる光学デバイスを提供する。
【解決手段】一つの発光素子2、一つの二次元位置検出受光素子3およびIC4を備えている。このように、上記発光素子2を一つだけ使用しており、小型化を図ることができると共に、被検出物の検出時間を短縮できる。
(もっと読む)
受光器及び当該受光器を備えたレーダ装置
【課題】体格を大型化することなく広い角度範囲の光を検知でき、且つ、受光素子の信頼性を向上することのできる受光器及び当該受光器を備えたレーダ装置を提供する。
【解決手段】受光器100を、外部から光が入射され、入射された光の屈折角度θrが、当該光の入射角度θiよりも小さい屈折体111と、屈折体111の入射面111a上に、受光面121を入射面111a側に向けて配置された第1受光素子120と、入射面111aと対向する屈折体111の対向面111bに設けられ、入射面111aを通して屈折体111に入射された光の少なくとも一部を、第1受光素子120に向けて反射するミラー112と、を備える構成とした。
(もっと読む)
3次元距離測定方法およびその装置
【課題】装置全体の構成を小型化することが可能であるとともに、高い分解能を達成する。
【解決手段】測定対象物にレーザー光を照射して上記測定対象物からの反射光をエリアイメージセンサにより受光し、上記エリアイメージセンサ上における受光位置に基づいて上記測定対象物までの距離を測定する3次元距離測定方法において、レーザー光を照射された測定対象物からの反射光を線状光に変換し、格子状に整列して複数配置された受光素子を有するエリアイメージセンサに対し、上記線状光を上記エリアイメージセンサ上における照射領域の延長方向が上記整列した複数の受光素子の所定の整列方向に対して所定の角度θをもって傾くように照射し、上記照射領域の延長方向に沿う順序で上記受光素子の出力を取得し、上記取得した受光素子の出力に応じて上記測定対象物までの距離を測定する。
(もっと読む)
高精度の距離測定装置およびその方法
本発明の態様によるターゲットのパラメータ測定システムおよび方法が、ターゲットに少なくとも1つの信号を送信すること、および、ターゲットから送信された信号の少なくとも一部分を受信することを含む。測定されたパラメータは、距離速度または反射率の1つである。送信された信号は、コヒーレントバースト波形のものであり、受信すると、等価時間サンプリング、誤差があったとしても、誤差が最小のAGC、位相計算離散フーリエ変換で処理される。 (もっと読む)
交通信号機制御装置、交通信号機制御方法、及び、プログラム
【課題】 交通信号機付近における被検知体に関する情報を正確に認識して交通信号機を制御することが可能な交通信号機制御装置、交通信号機制御方法、及び、プログラムを提供する。
【解決手段】 交通信号機制御装置10の動作パターンモデル記憶部13は、人間行動モデル104a、動物行動モデル104b、自動車モデル104c、及び、環境要因モデル104dを記憶する。解析部11は、交通信号機20付近に設置された焦電センサ101から出力される信号を解析する。被検知体認識部14は、解析部11による解析結果と、動作パターンモデル記憶部13に記憶されている動作パターンモデルとに基づいて、被検知体の動作内容を認識する。交通信号機制御部15は、認識結果に基づいて交通信号機20を制御する。
(もっと読む)
1 - 20 / 21
[ Back to top ]