
Fターム[5J084CA08]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 送信系に関するもの (1,298) | 変調方式、変調回路に関するもの (384) | 周波数変調、FM−CW (56)
Fターム[5J084CA08]に分類される特許
1 - 20 / 56
距離測定装置
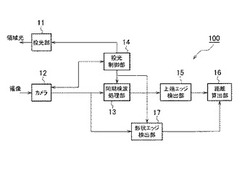
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
計数装置および計数方法

【課題】入力信号が時間的に非対称の場合でも計数結果を精度良く補正する。
【解決手段】カウンタ13は2値化信号のランレングスを数える。計数結果補正部14は、ランレングスの度数分布を、信号の立ち上がりから立ち下がりまでの第1のランレングスと立ち下がりから立ち上がりまでの第2のランレングスについて作成し、第1のランレングスの代表値THの0倍以上1倍未満の長さである第1のランレングスの数の総和、第2のランレングスの代表値TLの0倍以上1倍未満の長さである第2のランレングスの数の総和、{TH+(n−0.5)×(TH+TL)}以上{TH+(n+0.5)×(TH+TL)}未満の長さである第1のランレングスの数の総和、{TL+(n−0.5)×(TH+TL)}以上{TL+(n+0.5)×(TH+TL)}未満の長さである第2のランレングスの数の総和を求め計数結果を補正する。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
速度計測装置および方法
【課題】速度の計測範囲を広げる。
【解決手段】速度計測装置は、測定対象のウェブ11にレーザ光を放射する半導体レーザ1と、レーザ1の光出力を電気信号に変換するフォトダイオード2と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間とが交互に存在するようにレーザ1を動作させるレーザドライバ4と、フォトダイオード2の出力電流を電圧に変換する電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力から搬送波を除去するフィルタ部6と、フィルタ部6の出力に含まれる干渉波形の数を求める信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度を算出する演算部8を備える。レーザドライバ4は、第1の発振期間と第2の発振期間で時間に対する発振波長変化速度の絶対値が異なるようにレーザ1を動作させる。
(もっと読む)
レーザレーダ装置およびレーザ合成開口レーダ装置
【課題】レーザレーダ装置(ライダ装置)において、測定可能距離を長くすると共に、距離測定分解能を向上させることを目的とする。
【解決手段】時間変化に対し周波数が変化する検出用信号を生成する検出用信号生成部12と、検出用信号によって発振光を変調するレーザ発振・変調部14と、レーザ発振・変調部14によって変調されたレーザ光を送信する送信光学系17と、レーザ反射光を受信する受信光学系18と、受信されたレーザ反射光に対し復調を行う復調部20と、復調された復調信号とのタイミングを、レーザレーダ装置10の位置に応じて調整する遅延時間設定部24と、遅延時間設定部24によってタイミングが調整された参照用信号を生成する参照用信号生成部13、および参照用信号と復調信号との差異を示す差異信号を生成する差異信号生成部22と、差異信号に基づいて、目標物の情報を取得する情報記録・処理部30とを備える。
(もっと読む)
光波距離計
【課題】測距光の変調周波数を上げることなく測定精度を上げることができる光波距離計を提供する。
【解決手段】変調された可視測距光(L1)を出射する可視発光素子(108)と、可視測距光を受光して電気信号を発生する可視受光素子(109)と、可視受光素子からの電気信号で変調された赤外線等の非可視測距光(l2)を出射する非可視発光素子(114)と、非可視測距光を受光して電気信号を発生する非可視受光素子(115)とを備える。
(もっと読む)
振動振幅計測装置および振動振幅計測方法
【課題】物体の振動振幅を精度良く求める。
【解決手段】振動振幅計測装置は、物体12にレーザ光を放射する半導体レーザ1と、発振波長が増加する期間と発振波長が減少する期間とが交互に存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体12からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形を数える計数部7と、計数結果に基づいて物体12の振動の最大速度を算出する振動最大速度算出部8と、計数結果に基づいて物体12の振動周波数を算出する振動周波数算出部9と、振動最大速度と振動周波数とから物体12の振動振幅を算出する振動振幅算出部10とを備える。
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法
【課題】少ない計算量で計数誤差を補正する。
【解決手段】振動周波数計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7と、計数装置7の計数結果から物体10の物理量を求める演算装置8とを有する。計数装置7は、一定の計数期間における干渉波形の周期を測定し、この測定結果から干渉波形の周期の平均値を代表値として算出し、測定した1周期を1つの信号として計数すると共に、測定した周期が代表値の(n+0.5)倍以上(n+1.5)倍未満の場合は、計数の結果にnを加算することを、計数期間中の周期の全測定結果について行う。
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法
【課題】計数誤差を補正する。
【解決手段】振動周波数計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7と、計数装置7の計数結果から物体10の物理量を求める演算装置8とを有する。計数装置7は、一定の計数期間における干渉波形の半周期の数を数え、干渉波形の半周期を測定し、この測定結果から計数期間中の干渉波形の半周期の度数分布を作成し、この度数分布から干渉波形の半周期の分布の代表値を算出し、代表値の0.5倍未満である半周期の数の総和Nsと、代表値の2n倍以上(2n+2)倍未満である半周期の数の総和Nwnとを求め、これらの度数NsとNwnに基づいて計数結果を補正する。
(もっと読む)
波形観測装置及び方法
【課題】移動体を対象とした反射パルスの波形を高精度で観測することができる波形観測装置を提供する。
【解決手段】波形観測装置1は、繰り返し周波数を発生する繰り返し周波数発生器2と、繰り返し周波数でフェムト秒パルス光を発生するパルス発生器3と、フェムト秒パルス光をテラヘルツパルス波に変換して送信するパルス送信器4と、フェムト秒パルス光を励起用パルス光21と同期検波用パルス光22に分割するハーフミラー5と、ミラー6と、パルス波の方向を走査するビーム走査機構7と、反射波を受信して電流パルスに変換するパルス受信器8と、繰り返し周波数発生器2を制御する周波数制御部9と、受信波形を取得する波形取得部15と、距離計測部16と、波形計測部17と、出力部18と、対象別送信パラメータ算出部19とを備える。
(もっと読む)
光波距離計
【課題】温度位相ドリフトを低減するとともに誤差を小さくしながら遠距離測定できる光波距離計を提供する。
【解決手段】複数の主変調周波数F1、F2、F3で変調された第1の発光素子13と、前記各主変調周波数それぞれに近接した複数の傍変調周波数F1−Δf1、F2−ΔF2、F3−Δf3で変調された第2の発光素子14と、両発光素子から出射された光を受光する第1、第2の受光素子40、50と、第1の受光素子に接続された第1の周波数変換器群42、44、46と、第2の受光素子に接続された第2の周波数変換器群52、54、56とを備え、主変調周波数及び傍変調周波数は、それぞれの中で最も周波数の低いものF3、F3−Δf3と近接した周波数の主変調周波数F3−F4及び傍変調周波数F3−F4−Δf4に変更でき、近接法によって近接した2つの主変調周波数の差となる変調周波数F4を用いた場合の目標反射物22までの距離も算出する。
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中の物体であるウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の数を数える信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中のウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1からのレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2と電流−電圧変換増幅部5とフィルタ部6と、フィルタ部6の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測する。
【解決手段】物理量センサは、半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するようにレーザ1を動作させるレーザドライバ4と、レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化量に基づいて物体10の変位と速度のうち少なくとも一方を算出すると共に、基準周期を補正する演算部8とを備える。
(もっと読む)
光波レーダ装置
【課題】本発明は、望遠鏡の交換をすることなく、視線方向への計測可能範囲を比較的広くすることができるとともに、計測作業の円滑化を図ることができる光波レーダ装置を提供する。
【解決手段】第1及び第2コリメータ光学系106A,106Bは、第1及び第2送信光A4,A5のそれぞれを略平行化する。また、第1及び第2コリメータ光学系106A,106Bは、第1及び第2送信光A4,A5のそれぞれのビーム径及び集光距離を調整可能となっている。第1コリメータ光学系106A及び第2コリメータ光学系106Bを経た第1送信光A4及び第2送信光A5は、偏光合成分離手段108によって、互いの直交偏光成分が合成される。直交2偏光の送信光は、送受信同軸の望遠鏡109によって、大気中の所望の目標へ向けて照射される。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するようにレーザ1を動作させるレーザドライバ4と、レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化量に基づいて物体10の変位と速度のうち少なくとも一方を算出すると共に、周期の変化特性に応じて基準周期を補正する演算部8とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を干渉波形が入力される度に計測する信号抽出部7と、信号抽出部7が計測した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7の計測結果を基準周期と比較することにより補正し、補正した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物理量の誤算出の可能性を低減する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間とが交互に存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の数を数える信号抽出部7と、干渉波形の数から物体10との距離及び物体10の速度を算出する演算部8と、半導体レーザ1の発振波長変調の搬送波の振幅または周波数を調整することが可能な調整部11とを備える。
(もっと読む)
距離測定装置、距離測定方法及び投影装置
【課題】より迅速に対象までの距離を算出する。
【解決手段】レーザー光源2a、2b、2cからスクリーン100に向かってレーザー光La、Lb、Lcを同時に照射させる(ステップS1)。このように、レーザー光源2a、2b、2cからレーザー光La、Lb、Lcを同時に照射させことから、後述するスクリーン100までの距離やスクリーン100の角度をより迅速に測定することができる。そしてステップS5においては、位相差検出回路5a、5b、5cを動作させて、レーザー光La、Lb、Lcと反射光成分Ra、Rb、Rcとの位相差を検出し、各位相差に基づき、各距離を算出する(ステップS6)。また、これらの距離を用いてスクリーンの角度の角度を算出し(ステップS7)台形補正を実行する(ステップS8)。
(もっと読む)
1 - 20 / 56
[ Back to top ]