
Fターム[5J084CA60]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | AND、OR、NOT、論理演算 (16)
Fターム[5J084CA60]に分類される特許
1 - 16 / 16
距離測定方法及びそのシステム
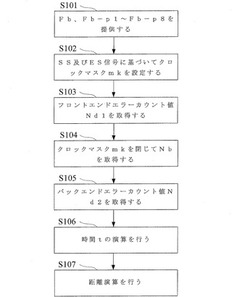
【課題】距離測定過程での演算速度と測定の正確性を高め、回路占用面積と消費電力を減少した、距離測定方法及びそのシステムの提供。
【解決手段】本発明の距離測定方法及びそのシステムは、光速度値と光信号が被測定物までを往復する時間値を利用して距離の演算を行い、前記光信号の発信/受信と同期するクロックマスクを利用して、このクロックマスク下の基準信号のサイクル数を取得して時間値を換算して得ると同時に、前記基準信号に基づいて生成された複数の位相シフト信号を利用して前述の時間値を修正し、かつ位相シフト信号数の増加に伴いエラーをさらに縮小して、正確な光信号が被測定物までを往復する時間値を取得することができ、且つ測定速度が速く、測定システムが占用する回路面積が小さいという利点がある。
(もっと読む)
信号処理装置、及び走査式測距装置

【課題】走査式測距装置による測定情報を利用して、測定光の伝播方向と交差する方向に移動する移動体の速度を正確に算出することができる信号処理装置を提供する。
【解決手段】信号処理装置は、測定対象空間に向けて所定の走査周期Tで測定光を走査する走査式測距装置1から入力される単位走査毎の測定情報を記憶する記憶部と、記憶部に記憶された過去と現在の単位走査毎の測定情報を走査方向に相対的にシフトさせたときに、双方の測定情報の一致度が最大となるシフト量Sと走査周期とTから移動体の速度を算出する速度演算部と、速度演算部で算出された速度に基づいて前記移動体の状態情報を出力する出力部と、を備えている。
(もっと読む)
方向検知デバイスおよび電子機器
【課題】被検知対象物の2軸に関する移動方向を検知する方向検知デバイスであって、安価である方向検知デバイスを実現する。
【解決手段】方向検知デバイス100は、被検知対象物106を検知するための検知信号を出力する発光部105Dと、検知信号が被検知対象物106にて反射されて得られた反射後検知信号が入力されるとともに、そのそれぞれが、3つの異なる出力A〜Cを出力する受光部105A〜105Cと、判定信号A〜Cの論理積を求めることによって、判定信号Dを生成する論理積回路102と、判定信号A〜Dに基づいて、被検知対象物106の、X軸およびY軸の2軸に関する移動方向を検知する判定装置103と、を備える。
(もっと読む)
時間計測装置およびセンサ装置
【課題】計測時間の計測精度の低下を抑制し得る時間計測装置およびセンサ装置を提供する。
【解決手段】レーザレーダ装置1に採用される制御回路70の時間計測回路71では、計測時間Tが、デジタル値D1およびデジタル値D2の比率と基準時間Toとに基づいて求められる。さらに、比率演算時の時間分解能Tr1が、比率演算時の演算誤差e1に等しくなるように設定されて、リング遅延パルス発生回路81の遅延素子(ゲートディレイ)の時間分解能よりも細かく設定される。
(もっと読む)
光波距離計
【課題】光波距離計においてサイクリックエラーをさらに小さくする。
【解決手段】測距光(L)を出射する発光部(d)と、測距光を変調する変調器(14)と、変調器に基準信号(K)を送る基準信号発生器(12)と、受光した測距光を測距信号(P)に変換する受光部(e)と、測距信号を用いて測点までの距離を算出する距離算出部(26)とを備える光波距離計において、変調器は、前記発光部に接続されたスイッチ素子(28)と、スイッチ素子と基準信号発生器の間に介在させた2段のXOR回路(30A、30B)からなり、各段のXOR回路それぞれに距離算出部からの位相反転信号(TA、TB)が入力される。
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法
【課題】少ない計算量で計数誤差を補正する。
【解決手段】振動周波数計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7と、計数装置7の計数結果から物体10の物理量を求める演算装置8とを有する。計数装置7は、一定の計数期間における干渉波形の周期を測定し、この測定結果から干渉波形の周期の平均値を代表値として算出し、測定した1周期を1つの信号として計数すると共に、測定した周期が代表値の(n+0.5)倍以上(n+1.5)倍未満の場合は、計数の結果にnを加算することを、計数期間中の周期の全測定結果について行う。
(もっと読む)
光波距離計
【課題】位相差方式の光波距離計による遠距離測定の測定誤差を小さくする。
【解決手段】複数の変調周波数(F1、F2、F3)を重ね合わせる周波数重畳回路(3)と、周波数重畳回路で重ね合わされた複数の変調周波数で変調された光を出射する発光素子(11)と、発光素子から出射された光を受光する受光素子(30)と、受光素子に接続される複数の周波数変換器(32,35,38)とを備えた光波距離計において、前記周波数重畳回路が、最も低い変調周波数(F3)以外の変調周波数が入力されるAND回路と、AND回路の出力及び最も低い変調周波数が入力されるXOR回路とから構成される。そして、最も低い周波数の局部発振信号が、2番目に低い変調周波数(F2)と最も低い変調周波数(F3)との差又は和といくらか異なる周波数(F2−F3+ΔF3)とされる。
(もっと読む)
距離測定装置
【課題】ターゲットからの複数の散乱光を受光して距離を測定する場合にカウンタ数が多くなり演算処理が複雑化する。
【解決手段】コンパレータ1はレーザ光に伴う送光パルスからスタートパルスを生成し、コンパレータ2はN個のターゲットからの各受光パルスを2値化しNビットデータとして出力する。測距回路5はスタートパルスとNビットデータの内で一番早く“1”となるストップパルス間の時間を計測し基準時間として出力する。遅延線6はターゲットに対する所望の遅延ステップでストップパルスを遅延させた遅延パルスを距離分解能対応の数Mだけ出力する。ラッチ回路7はNビットデータをストップパルスおとび各遅延パルスでラッチし遅延データとして出力する。
(もっと読む)
高速サンプリング装置を用いた目標検出装置および方法
【課題】高速サンプリング装置を用いた目標検出装置および方法を提供する。
【解決手段】目標検出の装置および方法であって、警備および監視の用途における目標検出の精度および速度を、論理回路を用いて向上させる装置および方法である。論理素子として、市販のフィールドプログラマブル・ゲート・アレイを用いることが可能である。一実施形態では、フィールドプログラマブル・ゲート・アレイのマルチギガビット・トランスファー(MGT)ポートが、外部クロックにロックされる。MGTポートを外部クロックに結合すると、装置をオーバーサンプリング・モードで使用しなくても、受信信号をサンプリングするレートを高めることができる。これにより、フィールドプログラマブル・ゲート・アレイが、実際の転送レートの少なくとも8倍の速度でサンプリングすることが可能になり、これによって、目標検出の速度および精度が向上する。
(もっと読む)
レーザレーダ装置および輸送機器
【課題】処理すべきデータの量を増大させることなく対象物までの距離を高精度で測定することが可能なレーザレーダ装置およびそれを備えた輸送機器を提供することである。
【解決手段】シリアルパラレル変換器140は、サンプルデータSMをnビットのパラレルデータPDに順次変換する。カウンタ回路150は、基本クロック信号CKの周期のn倍の周期を有するパラレルクロック信号PCKに基づいて、連続する0ブロックの数をカウントし、カウント結果を示すカウンタ出力信号CUを生成する。処理部180は、発射光の受光時におけるパラレルデータPD、反射光の受光時におけるパラレルデータPDおよび発射光の受光時と反射光の受光時との間での0ブロックの数を記憶部160に記憶し、記憶部160に記憶されたパラレルデータPDおよびカウンタ出力信号CUに基づいて距離を算出し、算出結果を距離信号DSとして出力する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の高速検知と物理量の高分解能計測とを両立させる。
【解決手段】物理量センサは、半導体レーザ1と、半導体レーザ1から放射されたレーザ光とその戻り光とを受光するフォトダイオード2と、フォトダイオード2の出力信号に含まれる、半導体レーザから放射されたレーザ光とその戻り光との自己結合効果によって生じる干渉波形の周期を検出し、反射壁面10による干渉波形の周期と異なる周期の干渉波形が所定の条件を満たすときに、レーザ光の放射方向に物体12が存在すると判定する物体検知装置11と、フォトダイオード2の出力信号に含まれる干渉の情報から物体12の物理量を計測する計測手段(電流−電圧変換増幅器5、フィルタ回路6、計数装置7、演算装置8)とを有する。
(もっと読む)
強度変調光を用いた空間情報検出装置
【課題】強度変調光を用いた空間情報検出装置において、周囲環境の変動による検出の誤差の増加を抑制する。
【解決手段】発光素子1は対象空間に強度変調光を投光し、CCD撮像素子からなる受光素子2により対象空間からの光を受光する。受光素子2から電荷を読み出すタイミングは受光駆動回路22からの受光タイミング信号sg4により決まる。受光タイミング信号sg4は受光タイミング回路21から出力される受光制御信号sg3をタイミング調整回路3で遅延させることにより得られる。タイミング調整回路3での遅延時間は、強度変調光に相当する発光タイミング信号sg2と受光制御信号sg3との位相差に応じて決まり、発光タイミング信号sg1と受光制御信号sg3との位相差を一定に保つ。
(もっと読む)
光波距離測定方法、距離測定プログラム及び距離測定システム
【課題】同時に多数の測定対象物について、多数回の距離測定を可能とし、又近接した測定対象物についても距離測定を可能とする。
【解決手段】測距光として所定の広がり角を有するパルスレーザ光線を複数の測定対象物11a,11b,11cに向け射出する複数の距離測定装置71と、前記複数の測定対象物についてそれぞれ複数の測距結果に基づき各測定対象物の座標を演算する演算処理装置72とを具備し、前記距離測定装置は、既知点に設置され、所定の広がり角を有するパルスレーザ光線を発する光源部と、1以上の測定対象物からの反射光を受光する受光部と、該受光部からの受光信号を基に前記測定対象物それぞれについての距離を演算する制御演算部とを具備し、前記演算処理装置は各距離測定装置から演算された測定対象物迄の距離データを取得し、該測定対象物それぞれについて複数の距離データ、既知点の位置から測定対象物の座標位置を演算する。
(もっと読む)
パルス光受光時間測定装置
【課題】回路規模を大型化することなく、反射率の低い自然対象物から反射率の高い再帰反射部材までの測定対象物の三次元測定を高速で行う。
【解決手段】
測定対象物からの反射パルス光を受光する受光素子13aと、受光素子13aからの反射パルス光に基づく光パルス信号RPをダンピング信号DPに変換する共振回路部13bと、共振回路部13bからのダンピング信号DPを増幅する多段のアンプリファイア群13c1〜13c4と、多段のアンプリファイア群の各段からのダンピング信号DPを処理する振幅比較器13fと零交差比較器13gとからなるダンピング信号処理回路と、多段のアンプリファイア群の各段のアンプリファイアに接続された零交差比較器からの複数の信号線を一本の信号線にまとめてパルス光受光時間測定回路に向けて出力する集約論理回路13eとを備え、アンプリファイア群の各振幅比較器の比較結果により、零交差比較器の動作を選択する。
(もっと読む)
測距装置
【課題】電源再投入による誤動作を防止できる測距装置を提供すること。
【解決手段】測距対象物に向けて光束を複数回投光するIRED4と、測距対象物に投光された光束の反射光を受光し測距対象物までの距離に応じた信号を出力するPSD5と、そのPSD5の出力信号を信号処理するAFIC10と、そのAFIC10に対し電源供給された後であってその電源供給が停止される直前にAFIC10を初期状態にリセットするリセット信号を出力するCPU1とを備えている。AFIC10への電源供給停止の直前にAFIC10のリセットが行われるため、電源電圧が一定電圧以下になる前に再投入されパワーオンリセットが行われない場合でも、正常な測距ルーチンを行うことができ、測距装置の誤動作の防止が図れる。
(もっと読む)
光学式距離測定装置および電子機器
【課題】 安価かつ小型で消費電力が小さい光学式距離測定装置およびその光学式距離測定装置を有する電子機器を提供すること。
【解決手段】 発振器1で発光信号Aが生成され、生成された発光信号Aが発光素子2へ送られて、発光信号Aに同期して発光素子2から光が発せられる。発光素子2から発せられて被検出物13で反射した光は、受光素子3に入射して電流信号に変換され、受光信号Bとなる。受光信号Bはプリアンプ4で電圧信号に変換されてミキサ部7に入力する。発振器1から発光信号Aが直接ミキサ部7に入力され、先の受光信号Bと論理演算によって合成される。上記ミキサ部7の合成信号Cは、積分器11で距離に比例する積分信号Dに変換され、判定部12で、被検出物までの距離が算出される。
(もっと読む)
1 - 16 / 16
[ Back to top ]