
Fターム[5J084CA65]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 画像データ (253)
Fターム[5J084CA65]に分類される特許
101 - 120 / 253
画像撮像装置
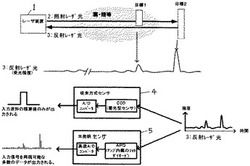
【課題】レーザレーダの測距精度の向上、レーザ光路上に複数の目標が有る場合への対応、および霧・雨等の影響を除去したデータ(画像)の取得。
【解決手段】レーザ照射後、光路上の全ての反射レーザ光の信号レベルをA/D変換器により時系列に取得する。A/D変換した信号からソフトウエアによる移動平均、ピーク検出処理により受光信号のピークレベルを正確に検知し、精度の高い測距データを得る。また、A/D変換データ上にある複数のピークを検出することにより、複数目標の距離を測定可能となる。更に、A/D変換データ上の所定の閾値以上の反射信号強度のみを抽出、表示することにより、霧・雨や背景のデータを削除した画像を表示する。
(もっと読む)
ライダーとビデオ測定を使用する3次元画像の生成システム及び方法

システムはターゲットの6つの自由度の軌跡を評価するため、ライダーシステムからの距離及びドップラ速度測定と、ビデオシステムからの画像とを使用する。システムはこの軌跡を2つの段、即ちビデオシステムからの画像から得られた種々の特性測定と共にライダーシステムからの距離及びドップラ測定が前記ターゲットの第1の段の運動特徴(即ちターゲットの軌跡)を評価するために使用される第1の段と、ビデオシステムからの画像とターゲットの第1の段の運動特徴がターゲットの第2の段の運動特徴を評価するために使用される第2の段で、この軌跡を評価する。ターゲットの第2の段の運動特徴が評価されると、ターゲットの3次元画像が生成されることができる。 (もっと読む)
誘導装置及び目標判定装置
【課題】飛しょう体に搭載され、レーザ光を利用し目標の3次元画像と強度画像を生成してデータベースの格納データと比較することで、目標と背景を高精度で分離可能な誘導装置を提供する。
【解決手段】飛しょう体1に搭載する誘導装置10において、レーザ光を発振する装置とレーザ光を検出する装置を備え、目標2を含む範囲を誘導装置10から照射するレーザ光で走査することによって走査範囲から反射したレーザ光を受光及び検出し、検出した信号から走査範囲のレーザ光の反射強度分布及び3次元形状を算出して強度画像及び3次元画像を生成し、生成した強度画像と3次元画像を利用した信号処理により、目標を検出する。
(もっと読む)
周辺物体検出装置、周辺物体検出方法
【課題】より正確に周辺物体を検出することができる周辺物体検出装置、周辺物体検出方法を提供する。
【解決手段】周辺物体検出装置1は、所定周期で強度変調された照射光を対象空間に照射する照射手段2と、対象空間において発生する反射光を所定周期内において複数設定された受光期間において受光し、受光された反射光の受光光量に応じた電荷を生成する光電変換手段5と、電荷に基づいて所定周期内の複数の受光期間毎の受光光量を検出する受光光量検出手段と、複数の受光期間毎の受光光量と第一換算式により照射光と反射光の位相差を算出する位相差算出手段と、第二換算式により反射光の輝度を算出する輝度算出手段と、位相差と第三換算式に基づいて周辺物体との相対距離を算出する相対距離算出手段と、輝度が所定閾値以上であって相対距離の一定期間内の変動距離が一定変動距離以下である場合に、周辺物体が虚像であると判定する虚像判定手段とを含む。
(もっと読む)
車両用物体検知装置
【課題】物体が横方向から自車進行方向に進入するような場合、物体の移動速度を精度良く算出するようにした車両用物体検知装置を提供する。
【解決手段】自車進行方向にレーザ光を発射すると共に、受信された反射波から検知エリア内の反射物の検出点を抽出し、複数の検出点が抽出されるとき、複数の検出点をクラスタリングして反射物を1個の物体として検出し(S10からS12)、検出された物体が自車進行方向に横方向から進入するとき、検知エリア内に完全に入っているか否か判定し(S16)、検出された物体が検知エリア内に完全には入っていないと判定されるとき、複数の検出点のうちの物体の移動方向において先端側または後端側の検出点を選択してそれに基づいて物体の移動速度を算出する一方(S18)、完全に入っていると判定されるとき、複数の検出点のうちの中央の検出点を選択して移動速度を算出する(S20)。
(もっと読む)
光センサシステム用の二重電圧電流制御フィードバックループ
光センサシステム用の二重電圧電流制御フィードバックループが提供される。電源が直流(DC)安定化電圧出力を提供する。電流源が直流(DC)安定化電圧出力を受け、光源にスイッチド電流を提供する。電流源が光源を駆動する際は光源への電流を表す電流フィードバックがフィードバックパス上で電源に提供される。電流源が光源を駆動しない場合は直流(DC)安定化電圧出力を表す電圧フィードバックがフィードバックパス上で電源に提供される。  (もっと読む)
(もっと読む)
光学センサシステムにおいて光源を駆動する電流源
光学センサシステムにおいて光源を駆動する電流源回路が開示されている。電流源は、抵抗器に直列接続されたインダクタ、及びインダクタと抵抗器に対して並列結合されたダイオードを含む。電流源は、調整された直流(DC)電圧を受け、スイッチが閉じているときにインダクタを通じて電流を光源へ供給し、スイッチが開いているとき、インダクタを通じた電流をダイオードへ流すように構成されている。  (もっと読む)
(もっと読む)
光学センサシステムにおいて光源に流れる電流の上昇時間を早める高電圧源
光学センサシステムにおいて、高電圧源回路により光源が駆動される。高電圧源により、高電圧出力が、光源のオン期間の開始期間に光源へと供給され、光源に流れる電流の上昇時間が減じられる。光源オン期間の開始の後、高電圧出力が、回路から非接続とされ、電流源が、電流出力を光源へと供給し、その余の光源オン期間の期間、光源を駆動する。  (もっと読む)
(もっと読む)
音源推定方法
【課題】車室内などの、室内モードの影響が大きい場所であっても、音源を精度よく推定することのできる音源推定方法を提供する。
【解決手段】複数のマイクロフォンM1〜M5とカメラ12とを一体化した音・映像採取ユニット10を一定の速度でゆっくりと移動させて、異音発生の指摘があった場所Pを中心に音と映像の情報を採取し、各マイクロフォンM1〜M5で採取した音の音圧信号を用いて音源方向(θ,φ)とを周波数毎に算出した後、音源方向のデータ(θkj,φkj)と音源の方向の推定に用いたときに撮影された映像の画像データGkとを合成して、推定された音源の方向を示す図形32が描画された音源位置推定画面33kを作成し、この音源位置推定画面33k中の上記図形32が集中的に描画されている箇所を上記異音の発生源の方向として、異音の発生源を特定するようにした。
(もっと読む)
距離画像センサシステムおよび距離画像生成方法
【課題】簡易な構成でかつ正確に距離画像を生成する距離画像センサシステムおよび距離画像生成方法を提供する。
【解決手段】被写体までの距離を画素ごとに測定した距離画像を生成する距離画像センサシステムである。距離画像センサシステムは、複数の光源、発光制御手段、距離画像生成手段、および距離画像選択手段を備える。複数の光源は、それぞれ離間して配置されて発光する。発光制御手段は、複数の光源を順に切換えて発光させる。距離画像生成手段は、複数の光源それぞれの発光に対応して画像の撮像を行い、各画素が撮像された被写体までの距離に応じた画素値を有する距離画像を、複数の光源それぞれに対応して複数生成する。距離画像選択手段は、距離画像センサシステム複数の距離画像のうち、画像の撮像において受光量が最も多い画像を用いて生成された距離画像を選択する。
(もっと読む)
物体検出装置
【課題】物体の向きに適応した物体の輪郭検出を行うことにより物体の検出精度を高められる物体検出装置を提供すること。
【解決手段】物体の検出を行う物体検出装置であって、LIDAR2により物体の検出点pを検出し、物体の向きをカメラ3によって検出し、物体の向きに応じて輪郭検出用のテンプレートを選択し、そのテンプレートをLIDAR2により検出された検出点pの点列Pに当てはめて物体の輪郭を検出する。これにより、物体の向きに適応した形状のテンプレートを用いて物体の輪郭を検出することができるため、物体の輪郭を適切に検出して物体の検出精度を高めることができる。
(もっと読む)
場面の内容に基づく点群データの視覚化のための方法及びシステム
色と空間データを結びつけるシステム及び方法が提供される。前記システム及び方法において、場面タグが、場所についての放射測定画像800の部分804のために選択される。さらに、前記放射測定画像データの前記第一の部分に関連する前記空間データ200の部分が選択される。前記場面タグに基づいて、前記空間データの前記部分の色空間関数500、600が選択される。前記色空間関数は、前記空間データの高度座標の関数として、色相、彩度及び輝度(HSIを定義する。)前記空間データの前記部分は、前記空間データの前記部分に基づく前記色空間関数から選択されるHSI値を用いて表示される。前記システム及び方法において、場面タグはそれぞれ異なる区分に関連する。各色空間関数は、関連する区分の前記HSI値における所定の異なるバリエーションを表す。  (もっと読む)
(もっと読む)
2D電子光学的画像データに対する3D点群データの登録
二次元画像データセット及び点群データを有する三次元画像の登録のための方法及びシステムについて開示している。本発明の方法は、シーンにおいて地表面を有する点群データの一部を除去するように、三次元画像データを有する点群データの三次元ボリュームをクロッピングするステップと、三次元ボリュームをm個のサブボリュームに分割するステップとにより始まる。次に、その方法は、二次元画像データをエッジ強調するステップを有する。次に、サブボリュームを各々適格化するために、フィルタ処理された濃淡画像を生成し、エッジ強調された前記二次元画像データ及び前記フィルタ処理された濃淡画像に基づいて、二次元相関表面を演算し、前記二次元相関表面のピークを求め、前記二次元画像における前記ピークの対応する位置を決定し、対応点セットを規定し、そして点セットリストにおける前記対応点セットを記憶するステップを有する。最終的には、点セットリストに含まれる複数の相関点セット間の誤差を最小化する変換が決定される。  (もっと読む)
(もっと読む)
三次元情報検出装置及び三次元情報検出方法
【課題】本発明は、高速に動く測定対象物に対しても、カメラから測定対象物までの距離を高精度な画像としてリアルタイムに検出する三次元情報検出装置及び三次元情報検出方法を提供することを目的とする。
【解決手段】強度変調光11を測定対象物200に照射する光源10と、
前記強度変調光の反射光12を受光し、該反射光の1周期の変調波に対して、又は所定の複数周期の変調波に対して、異なるタイミングでゲートを開放することにより撮像タイミングの異なる複数の画像61、62を取得する複数のゲート撮像素子41、42と、
前記複数の画像から、前記測定対象物の距離画像を算出する演算処理装置70と、を含むことを特徴とする。
(もっと読む)
目標検出装置及び目標検出方法
【課題】目標検出精度を向上させることができる目標検出装置を得る。
【解決手段】赤外線カメラ8の画像データを温度領域毎に分割し、レーザ測距器9の距離から各温度領域の角度と距離を求める画像処理器10と、互いに直交する偏波特性を有する二つのアンテナ1、2のうち、送信ではいずれか一方、受信では双方を駆動させ、観測対象のレーダ信号を収集する偏波切替器3と、レーダ信号を分解能セル毎に散乱ベクトルとして格納する観測散乱ベクトル蓄積器7と、求めた温度領域毎の角度と距離を用いて、対応する散乱ベクトルの分解能セルを抽出し、散乱ベクトルを温度領域毎に分割するレーダ信号分割器11と、温度領域毎に分割された散乱ベクトルからフィルタの生成を行い、フィルタを温度領域内の各分解能セルに適用処理を行い、温度領域毎に電力を出力するノッチフィルタ回路12と、電力を閾値と比較して目標とクラッタの判別を行う閾値回路13とを設けた。
(もっと読む)
距離画像処理装置および撮影装置
【課題】距離画像内で、位置を限定することなく、所望の抽出条件に適合する対象物を特定、抽出する。
【解決手段】距離画像内で、距離値を用いて検出対象となる対象物の候補を抽出する。距離画像内で、近接する距離値が所定以上連続する画素群を対象物候補として抽出する。抽出した対象物候補は、さらにパターンマッチング、速度制限などを用い、絞り込む。得られた対象物候補の中から抽出条件に適合するものを対象物として抽出する。また、抽出条件として、先に抽出したものと同じものを抽出するよう構成してもよい。
(もっと読む)
車両用距離画像データ生成装置及び方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置及び方法を提供すること。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、ノイズによる輝度を抑制しつつ移動平均に基づいて、距離画像データの生成に用いられる輝度を補正するステップS3〜S5の処理を備えた。
(もっと読む)
高解像度三次元撮像のシステムおよび方法
本発明の実施形態は、広い視野および精密なタイミングを用いた三次元撮像のためのシステムおよび方法を提供する。一側面によれば、三次元撮像システムは、広い視野を有する現場を照射するのに十分な発散で光パルスを放出するように構成される、照射サブシステムを含む。センササブシステムは、場面によって反射または散乱された光パルスの部分を広い視野にわたって受容するように構成され、時間の関数として、受容された光パルス部分の強度を変調し、変調された受容された光パルス部分を形成するように構成される、変調器と、受容された光パルス部分に対応する第一の画像、および変調された受容された光パルス部分に対応する第二の画像を生成するための手段とを含む。プロセッササブシステムは、第一および第二の画像に基づいて、三次元画像を取得するように構成される。  (もっと読む)
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、ターゲット距離の異なる複数の撮像画像中の画素に対して、周囲の所定画素範囲の平均輝度値との比較により画素の輝度値を変更するステップS4〜S6の処理を備えた。
(もっと読む)
距離計測装置および距離計測方法
【課題】観測領域に存在する物体までの距離を確実に計測することができる距離計測装置および距離計測方法を提供する。
【解決手段】車両前方の観測領域に対して投光器10から空間パタン光を照射して、この空間パタン光を照射した観測領域の画像をカメラ20で撮像する。このカメラ20の撮像画像を演算ユニット30に入力し、その撮像画像上の各ドットパタン光をデコードしてその照射方向を検知するとともに、各ドットパタン光の画像上の座標位置からその撮像方向を検知する。そして、カメラ20の撮像画像上の各ドットパタン光の照射方向と、各ドットパタン光の撮像方向と、投光器10とカメラ20との相対位置関係とに基づいて、三角測量の原理により、観測領域に存在する物体までの距離を計測する。
(もっと読む)
101 - 120 / 253
[ Back to top ]