
Fターム[5J084CA65]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 画像データ (253)
Fターム[5J084CA65]に分類される特許
141 - 160 / 253
車両用距離画像データ生成装置
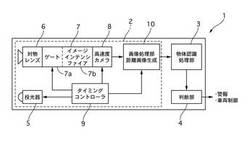
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
効率が向上した測地スキャナ
【課題】本発明は、ターゲットの外観を決定する方法および測地スキャナを提供する。
【解決手続】本発明の方法および測地スキャナでは、初期スキャンが行われ、ターゲット(150)の表面における、多数の予め定めた位置(151〜166)のそれぞれについて、最適なゲイン値の組を算出または決定する。すべての予め定めた位置についてのゲイン値(g151〜g166)が決定されると、ゲイン値を用いて予め定めた位置のそれぞれとの距離が算出される。本発明は、測定速度および全体の効率が向上する点で、好都合である。  (もっと読む)
(もっと読む)
車両周囲環境検出装置

【課題】レーダを用いて物体の属性を高い精度で判別する。
【解決手段】車両は、レーザの反射信号を受光して、車両周囲の物体を検出するレーザレーダ1と、レーザレーダ1が検出した物体の動きを検出する動き検出機能、レーザレーダ1における受光状態を検出する受信状態検出機能、並びにそれら検出した物体の動き及び受光状態を基に、レーザレーダ1が検出した物体が人間で確度を算出する確度算出機能を有する外界認識装置5を備える。
(もっと読む)
距離画像センサの校正装置及び校正方法
【課題】簡単なシステム構成により、移動体に取り付けられた距離画像センサを、当該移動体に取り付けられた状態で校正することのできる校正装置及び校正方法を提供する。
【解決手段】第1平面と第1平面とは異なる第2平面とを有して構成される校正指標は、姿勢情報及び移動体との位置情報が特定された状態で距離画像センサ20の検出範囲内に設置される。平面特定部3は、校正指標が含まれる距離画像データである校正対象データに基づいて、第1平面及び第2平面のそれぞれの平面を特定する。法線ベクトル演算部4は、第1平面及び第2平面のそれぞれの法線ベクトルを演算する。回転量演算部5は、校正指標の姿勢情報と法線ベクトルとに基づいて、三次元基準座標系における距離画像センサ20の回転量を演算する。
(もっと読む)
対象物測距装置及びプログラム
【課題】検出した対象物までの距離を精度良く算出することができる対象物測距装置及びプログラムを提供する。
【解決手段】投光パターン検出部22は、画像上の投光パターン34を検出し、歩行者検出部20は、画像上の歩行者を検出し、投光器制御部24は、歩行者32の画像上の位置座標、及び投光パターン34の画像上の投光位置座標を算出し、2点の偏差が所定値以下となるような投光器14の投光角度を算出し、算出した投光角度で投光されるよう投光器14を制御し、2点の偏差が所定値以下となった場合には、撮像装置12と投光器14との距離、投光位置のX座標、及び投光器14の水平方向の投光角度に基づいて、歩行者32までの距離を算出する。
(もっと読む)
ライダー装置及び対象物検出方法
【課題】
海上或いは非海上の対象物をより正確に把握することの可能なライダー装置及び対象物検出方法を提供すること。
【解決手段】
本発明に係るライダー装置1は、近・遠紫外パルスレーザー2を非スポット的に射出するレーザー射出部103と、前記レーザー射出部103からのレーザー2が対象物に照射されて返ってくる光を所定の波長幅ごとにフィルタリングするフィルタ107aと、前記フィルタ107aを通過した光を蛍光及び/又は水ラマン散乱光及び/又は弾性散乱光に分けてそれぞれを露光する受光機構106と、前記露光された蛍光及び/又は水ラマン散乱光及び/又は弾性散乱光をそれぞれの画像もしくは合成画像として表示する表示部101と、全体の機器制御を行う制御部101とを具備して構成される。
(もっと読む)
物体検出装置および物体検出方法
【課題】静止物体および移動物体についての座標算出を高精度に行うこと。
【解決手段】画像検知部が、車両に搭載されたカメラによって時系列に撮像された2つの画像を対比することによって静止物体の相対的な空間配置をあらわす相対3次元座標を取得し、レーダ検知部が、画像に対応する範囲について照射した照射波に係る反射波に基づいて静止物体および移動物体に係る距離および方位を取得し、物体座標認識部が、取得された方位に存在する前記画像内の静止物体について取得された距離を用いて相対3次元座標から絶対3次元座標を算出するように物体検出装置を構成する。
(もっと読む)
裏面照射型撮像素子及び距離測定装置
【課題】距離算出時間を短縮することが可能な裏面照射型撮像素子を提供
【解決手段】一定周期で強度変調された照射光による対象物8からの反射光をp基板24の裏面側から受光し、反射光に応じてp基板24内の複数の光電変換部で発生して蓄積された電荷をp基板24の表面側から読み出して撮像を行う裏面照射型撮像素子であって、1つの光電変換部に対応して4つ設けられ、対応する光電変換部で発生して蓄積された電荷を一時的に蓄積するための電荷蓄積部15a〜15dと、p基板24の表面上方に設けられ、1つの光電変換部に対応する電荷蓄積部15a〜15dの各々に、該光電変換部に蓄積される電荷のうち反射光の該各々に対応する位相における光に応じた電荷を蓄積させる制御を行う電極20と、p基板24の表面上方に設けられ裏面照射型撮像素子が形成されたチップとは別のチップと電荷蓄積部15a〜15dとを接続するためのチップ間接続用電極21とを備える。
(もっと読む)
障害物検出システム及び障害物検出方法
【課題】正確に床検出を行うことが可能な障害物検出システム及び移動ロボットを提供すること。
【解決手段】本発明にかかる障害物検出システム100は、距離画像データを生成する距離画像センサ1と、前記距離画像データに基づいて障害物を検出するデータ処理部2とを備えている。データ処理部2は、距離画像センサ1により生成された距離画像データより得られる反射光強度と、距離画像センサ1によって生成された距離画像データによる距離に基づいて、障害物を検出する。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
物体を撮像する方法および物体を撮像するためのシステム
【課題】非縮退であって周波数エンタングルされた光子を用いて撮像を行なう。
【解決手段】少なくとも部分的に不明瞭であることが考えられる物体を撮像する。周波数エンタングルされた光子が生成される。これらの周波数エンタングルされた光子は、第1および第2の周波数を有する光子を含む。第1の周波数を有する光子は、遮蔽物を通過して物体を照らすことができる。物体により散乱した光子および第2の周波数を有する光子を用いて、到達時間の一致を考慮することにより、画像を形成する。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】精度良く測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、次いで、第2の測距光を発光し、第2の測距光の変調周期における複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
画像センサデータに距離センサデータをマッピングする方法及び装置
第1の距離センサ(3(1))からの第1の距離センサデータをカメラ(9(j))からの画像データにマッピングする方法及び装置。当該方法は、モバイル・システムに搭載された位置判定装置からの時間データ及び位置データと、モバイル・システムに搭載された少なくとも第1の距離センサ(3(1))からの第1の距離センサデータと、前記モバイル・システムに搭載された少なくとも1つのカメラ(9(j))からの画像データとを受信する工程と、第1の距離センサデータ内で、少なくとも1つの物体に関連する第1の点群を識別する工程と、第1の点群に基づいて物体に関連するマスクを生成する工程と、少なくとも1つのカメラ(9(j))からの画像データ内に存在するのと同一の物体に関連する物体画像データ上に、マスクをマッピングする工程と、物体画像データの少なくとも一部分に対して、予め定められた画像処理技術を実行する工程とを含む。  (もっと読む)
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】精度良くかつ高速に測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、複数の第1の受光信号に基づいて、第1の測距光と第1の測距光の反射光との位相差を算出し、位相差に基づいて第2の測距光の位相を第1の測距光とは異なるように変更して第2の測距光を発光する。第2の測距光の変調周期における位相差に応じた複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
形状測定装置
【課題】スリット光を用いた三角測量において、被検物によってスリット光が正反射された場合においても、被検物の形状を部分的に欠落することなく測定する。
【解決手段】
この3次元形状測定装置10は、第1投光部11、第2投光部12、撮像部13、および画像処理部14を備える。第1投光部11と第2投光部12とは、異なる照射角で被検物1を照射するので、一方からのスリット光が正反射したとしても、それと同時に他方からのスリット光が正反射することはない。よって、正反射が生じていない方の投光部の照射光の反射光を撮像した画像を採用し、被検物1の3次元形状を解析する。本発明は、スリット光を用いた三角測量により被検物の3次元形状を測定する測定装置に採用することができる。
(もっと読む)
物体検出装置
【課題】物体の端部を高精度に特定することができる物体検出装置を提供する。
【解決手段】自車両の前方を走行する他車両の位置情報を一定の周期で繰り返して検出するLIDAR2と、自車両の前方を撮像して自車両の前方を走行する他車両を撮像するカメラ3と、LIDAR2から送信されるLIDAR点列と、カメラ3から送信される撮像画像撮像画像とにより、自車両の前方を走行する他車両の端部を特定して、この他車両の中心位置及び向きを検出するECU4とを備えている。そして、このECU4は、LIDAR点列に近似された物体検出直線αと、撮像画像における矩形領域の左右端の方位直線β1,β2との交点x1,x2を、他車両21の左右端部として特定する。
(もっと読む)
レーザ距離測定機を用いた保安システムおよびレーザ距離測定機を用いた侵入者検出方法
【課題】侵入者の存在有無および侵入者の位置を正確に把握することができるレーザ距離測定機を用いた保安システムおよびレーザ距離測定機を用いた侵入者検出方法が開示される。
【解決手段】レーザ距離測定機を用いた保安システムは、レーザ光を放出して反射して戻ってきたレーザ光を受信して目標物との距離を測定し、侵入者の存在有無および侵入者の位置を検出するレーザ距離測定機と、放出されたレーザ光をレーザ距離測定機に反射する少なくとも1つの反射手段とを備え、少なくとも1つの反射手段は、レーザ距離測定機から所定の距離離隔した位置でレーザ距離測定機の誤差距離だけ離隔して設置されることを特徴とする。したがって、レーザ距離測定機の誤差距離を考慮して反射手段を設置することで、侵入者の存在有無および侵入者の位置を正確に把握することができる。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】距離画像および輝度画像の双方を生成するに際し、高解像度の輝度画像を生成できるようにする。
【解決手段】測距光照射部3が、所定周期にて強度変調された測距光を被写体に照射し、複数の受光素子が配列されたCCD13が被写体による測距光の反射光を受光し、受光光量に応じた信号を出力する。この際、撮像制御部19が、所定数の受光素子からなる受光素子単位にて、測距光の変調周期における互いに異なる複数の位相において反射光をそれぞれ受光して、複数の位相毎に信号を取得するようCCD13を制御する。距離画像生成部31が、複数の位相毎の信号に基づいて、受光素子単位にて被写体までの距離を表す距離情報を算出し、距離情報を各画素の情報とする距離画像を生成する。輝度画像生成部32が、複数の位相毎の信号に基づいて、受光素子単位にて被写体の輝度を表す輝度情報を複数算出し、各輝度情報を各画素の情報とする輝度画像を生成する。
(もっと読む)
ファイル生成装置および方法、ファイル表示装置および方法並びにプログラム
【課題】距離画像を表示する際に、距離画像に関連する輝度画像あるいは高解像度の距離画像の存在の有無を容易に確認できるようにする。
【解決手段】第1の距離画像生成部31が、被写体までの距離を表す第1の距離画像S1を生成する。第2の距離画像生成部32が、第1の距離画像S1よりも高解像度の第2の距離画像S2を所定条件下において生成する。ファイル生成部24が、第1の距離画像S1および第2の距離画像S2から1つの画像ファイルF0を生成するに際し、第2の距離画像S2の有無を表す付帯情報を付与して画像ファイルF0を生成する。
(もっと読む)
測距方法および装置
【課題】変調光位相差方式により距離を測定する際の誤測距を防止する。
【解決手段】発光部10から一定の周期Tで強度変調された変調光L1が被写体Sに対して射出される。被写体Sから反射した反射変調光L2が受光ユニット20において受光され、第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号γが各受光素子22a〜22dにより取得されていく。その後、判定部29において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが判定され、差分ΔWが設定値Aより小さいとき、4種類の各検出信号α〜γを用いて変調光L1と反射変調光L2との位相差Δφが検出され、この位相差Δφを用いて被写体までの距離dが算出される。一方、差分ΔWが設定値A以上であるブロックBRが存在するとき、位相差Δφの検出が行われず距離演算は行われない。
(もっと読む)
141 - 160 / 253
[ Back to top ]