
Fターム[5J084CA65]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 画像データ (253)
Fターム[5J084CA65]に分類される特許
241 - 253 / 253
3Dカメラ用誤差補償方法
一つのシーン(場面)内の距離値dを4タップ3Dイメージセンサの出力から、該イメージセンサの画素に所定の積分時間間隔Tintg中に累積される電荷に基づいて決定する方法が開示される。本発明によれば、所定の積分時間間隔Tintgは多数の部分積分時間間隔(T1、T2、T3、T4)に分割され、距離値dが上記部分積分時間間隔(T1、T2、T3、T4)の各々の端における4タップの個々のタップ応答に基づいて計算される。 (もっと読む)
流体流動計測システムおよび風力発電装置

【目的】 実地形についての広範囲な風況の把握可能な流体流動計測システム、およびそれを用いた風力発電装置を提供する。
【構成】 レーザ光を流動場へ照射させるレーザ発振装置と、 流動場に照射されたレーザ光が捉える粒子を連続撮影して撮影画像データを取得する画像撮影手段と、 その画像撮影手段による撮影のタイミングをレーザ光の照射に同期させる制御手段と、 撮影画像データを風況解析用に処理する画像処理手段とを備える。前記レーザ光学系は、当該流動場内における風力発電装置を挟んで異なる複数の計測領域を照らすレーザ光を照射し、前記画像撮影手段は、その複数のレーザ光に対する撮影画像データを取得する。前記画像処理手段は、取得した複数の撮影画像データを用いて流動場の風況解析に供する画像処理を行う。
(もっと読む)
先行車両検出装置

【課題】路面を先行車両と誤認識することのない先行車両検出装置を提供すること。
【解決手段】自車両から照射した照射波の反射波を受信して先行車両の有無を検出する先行車両検出装置において、照射波が路面に照射される走行状態を検出する走行状態検出手段と、走行状態検出手段により照射波が路面に照射される走行状態であることが検出されたとき、反射波の波形に基づいて照射波を反射した物体が先行車両か路面かを判定する判定手段と、を備えた。
(もっと読む)
オブジェクトを認識しかつ追跡するための方法
本発明は、センサの検出領域において、特にはレーザ・スキャナである少なくとも1つの電磁放射線用センサにより一定時間捉えられた、少なくとも1つのオブジェクトの画素を含む深度分解像を基礎としてオブジェクトを検出しかつ追跡するための方法に関する。この方法によれば、次のステップが連続サイクルにて実行される。現行画像の画素から少なくとも1つのカレント・オブジェクト輪郭が形成されるステップと、先行サイクルにおけるオブジェクトのために、先行サイクルにおける対応するオブジェクトに割り当てられた個々のオブジェクト輪郭から開始される現行サイクルにおいて、少なくとも1つのオブジェクト輪郭が予測されるステップと、前記オブジェクトのうちの少なくとも1つのために、前記カレント・オブジェクト輪郭から現在位置が決定され、及び/または、前記カレント・オブジェクト輪郭及び先行サイクルにおける前記オブジェクト輪郭からオブジェクトの速度が決定されるステップ。  (もっと読む)
(もっと読む)
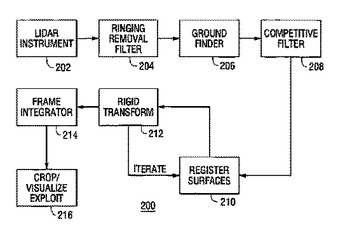
多次元地理的ポイントの同時レジスタリング方法及びシステム
多次元オブジェクトを表す多次元地理的データポイントをレジスタリングする方法は、a)多次元オブジェクトの表面の複数の重複したフレームを表す複数のポイントを受け付けるステップと、b)第1フレームの各ポイントに対して、以降の複数のフレームのそれぞれの対応する最も近いポイントを検出するステップと、c)対応する最も近いポイントが揃うように、各フレームに対する回転及び変換を決定するステップと、d)各回転及び変換を実行するためのコストを決定するステップと、e)最適な変換を提供するため、さらなるフレームに対してステップb)からd)を繰り返すステップとから構成される。
 (もっと読む)
(もっと読む)
地形点から3次元整合される地表そのもののデジタル標高モデル抽出
多次元対象についての複数の視野を表す複数のフレームを表している複数の未加工の地形点から、デジタル標高モデルを抽出する方法(300)は:表面上方の妨害物により生成されたデータ点をフィルタリング除去することによって表面を探知し(304)、それにより表面を表す複数の表面データ点を提供し;且つ競争的フィルタを用いて表面データ点をフィルタリングし(306)、それによりデジタル標高モデルのデータ点の多次元表面シェルを提供する;ステップ又は作用を有する。上記方法はまた、専用の情報処理システム、又はプログラム可能な情報処理システム(200)によって実行されることが可能であり、あるいは例えばCD−ROM又はDVD等のコンピュータ可読媒体内の命令セットとして実行されることが可能である。 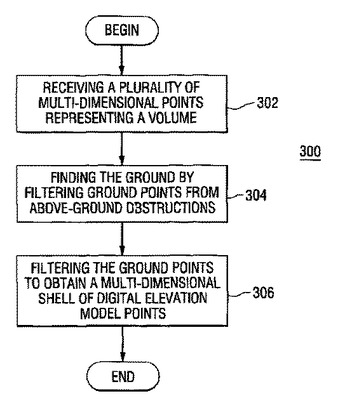 (もっと読む)
(もっと読む)
航空機の上流の乱気流を予測して測定するためのシステム
本発明は、航空機(14)の上流の乱気流を予測して測定し、該航空機に搭載されて配置されたシステムに関し、該システムは;前記航空機(14)の前部に向けて光ビーム(11)を送信し、かつ散乱された光ビーム(12)を受信するためのライダ(10)と、制御手段と関連付けられた直接検出デバイスと、第1内部補正アルゴリズムを使用する第1処理素子と、第2補正アルゴリズムを使用して、少なくとも1つの航空機制御面のアクチュエータに実行可能な命令を送信する第2処理素子と、を含む。 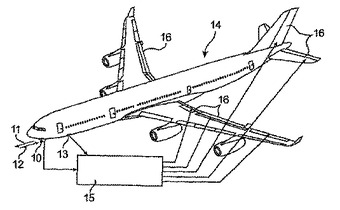 (もっと読む)
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
飛翔体追尾方法及び飛翔体追尾装置
【課題】 自機に向かって飛来するミサイルなどの飛翔体を発射後の早い時期に探知し、継続的に追尾することが可能な飛翔体追尾方法及び飛翔体追尾装置を得る。
【解決手段】 紫外線センサを設け、自機に向かって飛来するミサイルなどの飛翔体を、この飛翔体のプルームが発する紫外線を検出することにより、パッシブな手法でかつ早期に初期探知する。また、初期探知した飛翔体の赤外線画像を撮像して飛翔体のテール部を抽出後、このテール部から飛翔体の進行方向にレーザビーム光を照射することによって飛翔体のシーカ搭載位置を捕捉し、これを照準点としてレーザビーム光による飛翔体の追尾を継続する。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 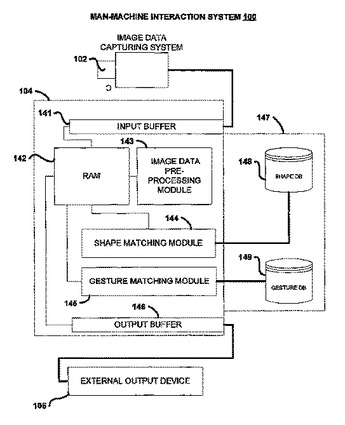 (もっと読む)
(もっと読む)
単一チップの赤、緑、青、距離(RGB−Z)センサー
RGB−Zセンサーは単一のICチップ上に実施可能である。ホットミラーなどのビームスプリッタが、対象物から入射する第一及び第二のスペクトルバンド光エネルギーを受信し、好ましくはRGBであるイメージ成分及び好ましくはNIRZである成分に分離する。RGBイメージとZ成分は、それぞれイメージデータとZデータを出力するRGBピクセル検出器及びNIRピクセル検出器のアレイ領域によってそれぞれ検出される。これらの領域のピクセルサイズ及びアレイ解像度は同一である必要はなく、またこれら両方のアレイ領域を共通のICチップ上に形成しても良い。対象物の認識を容易にするために、イメージデータを用いたディスプレイはZデータによって補助できる。その結果得られる構成は、ビームスプリットを行なうことによる光学的効率性と単一のICチップに実施することによる簡素性とを組み合わせたものとなる。この単一チップの赤、緑、青、距離(RGB−Z)センサーの使用方法も開示されている。  (もっと読む)
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
車両用表示装置
【課題】 視認性の良くない走行環境において前方に存在する障害物を、ドライバが容易に認識させる。
【解決手段】 表示制御装置は、ライトスイッチがオン状態のときには前方視界が良くないと判断できるので、前方障害物センサによる障害物の検出結果と、予め設定された赤外線カメラと当該前方障害物センサとの車両上の配置関係に関する情報とに基づいて、その障害物に相当する部分画像を、当該赤外線カメラによって撮影された赤外画像の中から抽出し、抽出した部分画像を、地図画像情報に基づいて生成した現在位置前方の立体的な地図画像の対応位置に重ね合わせた状態で、表示器に表示する(S1-S2)。
(もっと読む)
241 - 253 / 253
[ Back to top ]