
Fターム[5L096CA04]の内容
Fターム[5L096CA04]に分類される特許
21 - 40 / 2,764
マーカの検出および追跡装置
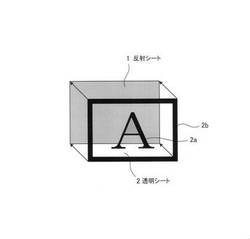
【課題】カメラからマーカまでの距離が近傍から遠方までの広範囲に変化した場合においても、画像処理によりマーカを検出し、そのマーカを追跡する装置を提供する。
【解決手段】マーカとしては、赤外光を反射する反射シート1を下地として、マーカ模様2a,2bを印刷した透明シート2を下地に貼り付けて構成するか、又は、マーカ模様の切り抜きを反射シート1に直接貼り付けて構成し、撮影部としては、マーカを撮影するカメラの前に赤外線透過フィルタを設置すると共にカメラの近傍に赤外線照明手段を設置してなり、演算処理部としては、近距離のときにはカメラにより撮影された入力画像の画像特徴量によりマーカを検出する画像特徴量方法と、遠距離においてはカメラにより撮影された入力画像の赤外光を基にマーカを追跡する赤外光方法とを切り替えて適用する演算処理を行う。
(もっと読む)
車両用外界認識装置およびそれを用いた車両システム

【課題】自車挙動に応じて撮像タイミングを調整することにより、一定の処理周期の中で自車速に応じて効果的、効率的に物体の動きを観測する車両用外界認識装置を提供する。
【解決手段】車両用外界認識装置1000は、カメラ1010等の撮像装置から画像を取り込む画像取得部1011と、カメラから画像を取り込むタイミングを調整する撮像タイミング手段1031とを有し、撮像タイミング手段で設定された一定周期での画像取り込みと、その周期の間に不定期での画像取り込みを行う。自車挙動取得手段1021で自車速を取得し、取得された自車速に応じて不定期での画像取り込みのタイミングを調整し、取り込まれた画像を用いて前景と背景を分離し、前景から衝突の可能性がある物体を検出する。
(もっと読む)
運転支援システム、運転支援方法、及び、プログラム
【課題】比較的軽い処理で運転者の支援を行う運転支援システムを提供する。
【解決手段】 運転支援システム1は、動領域抽出によって、領域分割(撮影画像を画像要素に分割する処理)と、視差情報の抽出(視差マップの生成処理)とを行うため、ブロックマッチングを用いる方法に比べて、処理負荷を抑えることができる。また、右画像と左画像の同一画像要素を特定し、視差を算出する場合には、精細なカメラの校正と画像の補正が必要であるが、本運転支援システム1では、これらは不要である。さらに、本運転支援システム1によれば、動きや形の変化を推定するため、他の移動体に相当する画像要素の多様な動きや、形の変化にも対応できる。
(もっと読む)
ジェスチャ認識装置、その方法、及び、そのプログラム
【課題】指先動きに応じた動作の誤判定を軽減できるジェスチャ認識装置を提供する。
【解決手段】取得した動画像からユーザの指先位置の軌跡を検出する検出部12と、前記指先位置の軌跡から送り動作か否かの判定を行うための有効範囲を設定する設定部15と、前記指先位置の軌跡が、前記有効範囲に含まれている場合に、前記指先位置の軌跡が送り動作か否かを判定する判定部14と、前記指先位置の軌跡が前記送り動作の場合に、前記送り動作から前記ユーザのジェスチャを認識する認識部16とを有する。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム
【課題】不確実で非同期な入力情報に基づく情報解析により、ユーザ位置や識別情報、発話者情報などを生成する構成を実現する。
【解決手段】画像情報や音声情報に基づいてユーザの推定位置および推定識別データを含むイベント情報を入力し、入力イベント情報に基づいて、各ユーザの位置およびユーザ識別情報を含むターゲット情報と、イベント発生源の確率値を示すシグナル情報を生成する情報統合処理部を有し、情報統合処理部は、発話源確率算出部を有し、発話源確率算出部は、各ターゲットの発話源確率を示す指標値としての発話源スコアを、イベント検出部から入力する複数の異なる情報に対して発話状況に応じた重みを乗算して算出する処理を行う。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】処理負担を軽減する。
【解決手段】実施形態の画像処理装置は、特徴算出手段と、探索手段と、推定手段と、生成手段と、重畳手段と、を備える。特徴算出手段は、第1のフレーム画像情報について、所定の表示領域単位で、表示領域に含まれる特徴情報を算出する。探索手段は、第1のフレーム画像情報と、第1のフレーム画像情報より後の第2のフレーム画像情報と、の間の、画素の動きを探索する。推定手段は、探索された画素の動きと、第1のフレーム画像情報の表示領域単位の特徴情報と、に基づいて、第2のフレーム画像情報の表示領域単位の特徴情報を推定する。生成手段は、第2のフレーム画像情報の表示領域単位の特徴情報に従って高周波成分を異ならせた高周波画像情報を生成する。重畳手段は、第2のフレーム画像情報に高周波画像情報を重畳する。
(もっと読む)
映像付加情報関係性学習装置、方法、及びプログラム
【課題】映像に含まれる画像情報と音響情報との双方を利用し、かつその相互の共起関係を考慮して、それら情報と言語情報との関係性の学習をより高精度に行うことができるようにする。
【解決手段】蓄積画像特徴抽出部5によって、完全蓄積映像及び不完全蓄積映像の各々から、完全蓄積画像特徴及び不完全蓄積画像特徴を抽出する。蓄積音響特徴抽出部6によって、完全蓄積映像及び不完全蓄積映像の各々から、完全蓄積音響特徴及び不完全蓄積音響特徴を抽出する。蓄積付加情報特徴抽出部4によって、蓄積付加情報の各々から蓄積付加情報特徴を抽出する。蓄積潜在変数抽出部8によって、映像と付加情報の関係性を記述するための変数の集合である蓄積潜在変数集合を抽出する。映像・付加情報間関係性学習部9によって、映像と付加情報との関係性を記述するモデルである映像・付加情報関係モデルを学習する。
(もっと読む)
電子的に会話を評価するための方法およびシステム
【課題】会話の解析を自動的に支援する方法および機器を提供する。
【解決手段】本発明は、少なくとも2人の人の間の会話を電子的に評価するための方法に関し、ビデオデータを受けるステップと、会話中に2人の間で視覚的な相互作用が生じたか否かを決定するためにビデオデータを解析するステップと、眼の運動方向が同じモードであるか否かを決定するために2人の眼の運動を解析するステップとを備える。
(もっと読む)
画像信号処理装置
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
3次元座標算出装置、3次元座標算出方法、及びプログラム
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
情報処理装置、表示制御方法、およびプログラム
【課題】被写体の動作に応じて着脱を制御することが可能な情報処理装置、表示制御方法、およびプログラムを提供する。
【解決手段】撮像された被写体の動作を検出する動作検出部と、前記動作検出部により検出した動作に応じて、前記被写体に重畳して表示される仮想的な服飾品の着脱を制御する表示制御部と、を備える、情報処理装置。
(もっと読む)
画像処理装置、画像処理プログラム及び画像処理方法
【課題】鮮鋭且つ自然な画像を生成することを課題とする。
【解決手段】画像処理装置は、特徴量算出部と、生成部と、加算部とを有する。特徴量算出部は、所定範囲内での画素値の変化を表す特徴量を入力画像から算出する。生成部は、学習用画像の特徴量に対する高周波成分を含む学習用画像の特徴量の相対的な値の分布を表す確率分布と、特徴量算出部によって算出された特徴量とに基づいて、画素値の変化のパターンを表す所定画像パターンの重みを求め、求めた重みで該所定画像パターンを重み付けることにより、入力画像に対する高周波成分を生成する。加算部は、入力画像に、生成部によって生成された高周波成分を加算する。
(もっと読む)
画像マッチング装置及び画像マッチングプログラム
【課題】特徴ベースの画像マッチングにおいて、特徴箇所の減少を防ぐことができる画像マッチング装置を提供する。
【解決手段】入力したクエリ画像群と、予め保存されている検索対象画像とのそれぞれから特徴箇所を抽出し、抽出した特徴箇所毎に局所記述子を算出して特徴データとして出力する特徴表現手段と、クエリ画像群の特徴データを統合し、統合結果特徴データとして出力する特徴統合手段と、統合結果特徴データと、検索対象画像の特徴データとの間で各々の特徴箇所の局所記述子のベクトル間距離値に基づくスコア値を算出し、クエリ画像の特徴箇所に対応する検索対象画像のスコア値に基づきマッチング画像を出力する照合手段とを備えた。
(もっと読む)
ビデオ画像シーケンスにおいて移動物体を検出するための方法および装置
【課題】画像シーケンスにおいて移動物体を検出する方法を提供する。
【解決手段】a)画像シーケンスの一対の連続画像の一方の画像での特徴点を決定し、b)決定した特徴点を用いて、一対の画像の一方を、他方に投影する数学的変換を決定し、c)決定した変換により、互いへ変換される一対の画像の複数の画像の間の差として差分画像を決定し、d)決定した差分画像において特有の画像変化点を決定し、e)決定した特有の画像変化点から物点を決定するステップとを含む方法である。ステップd)は、d1)画像変化の閾値を確立し、閾値を超える画像変化点を、差分画像内のそれらの点として決定し、d2)所定の品質基準に基づいて、画像変化点の質を分析し、d3)品質基準が満たされている場合、d1)で決定した画像変化点をステップd)で決定する画像変化点として確立し、さもなければ、d1)で確立される閾値でd1)及びd2)を繰り返すステップを含む。
(もっと読む)
顔画像認証装置
【課題】表情、顔の向きの変動等により本人認証をしにくい状況でも本人受理を確保することができる顔画像認証装置を提供する。
【解決手段】認証候補人物特定手段326は、類似度算出手段325によって算出された類似度に基づいて前記複数の登録人物から認証候補人物を特定する。検出率算出手段327は、顔追跡手段322によって追跡された直近の複数の顔領域画像に対する類似度が最高となったフレームの割合である登録人物検出率を、認証候補人物について計算する。認証閾値決定手段328は、顔領域画像に含まれる顔が認証候補人物として特定された登録人物の顔であるか否かを認証するための基準である認証閾値を、登録人物検出率に応じて決定する。認証判定手段329は、類似度が認証閾値を超えた認証候補人物を監視領域内の人物の顔であると判定する。
(もっと読む)
情報処理装置、表示制御方法、およびプログラム
【課題】被写体の動作に応じて着用状態を変化させることが可能な情報処理装置、表示制御方法、およびプログラムを提供する。
【解決手段】撮像された被写体の動作を検出する動作検出部と、前記動作検出部により検出された動作に応じて、前記被写体に重畳して表示される仮想的な服飾品の着用状態を変化させる表示制御部と、を備える、情報処理装置。
(もっと読む)
画像処理装置およびデジタルカメラ
【課題】背景に動きがある場合でも適切に前景候補を判断し得る画像処理装置を提供すること。
【解決手段】画像処理装置は、nフレーム目の画像と、(n−1)フレーム目の画像において背景を示す画像とをそれぞれ用いて該nフレーム目の画像において背景を示す画像を合成する画像合成手段20と、(n+1)フレーム目の画像と、画像合成手段20により合成された画像とをそれぞれ用いて該(n+1)フレーム目の画像において前景を示す画像を生成する画像生成手段20とを備える。
(もっと読む)
認識支援装置、認識支援方法、およびプログラム
【課題】物体認識させる画像を適切に撮影することができるようにすることで、短時間で適切な物体認識を可能とする認識支援装置、認識支援方法およびプログラムを提供する。
【解決手段】物体認識装置による物体認識を支援する認識支援装置であって、画像取得部が、異なる時刻に撮影された識別対象の物体を含む2つの画像を取得する。重要領域検出部は、前記2つの画像における前記物体認識装置による認識の確信度の差分と、前記2つの画像に含まれる特徴点における特徴を定量化した特徴量の差分とに基づき、重要領域を検出する。重要領域は、前記物体認識装置の認識精度を向上させる、前記認識対象の物体の一部を含む。また、重要領域検出部は、重要領域を前記2つの画像のいずれかから検出し、前記重要領域を表示部に通知することにより、上記課題の解決を図る。
(もっと読む)
自車移動推定方法および自車移動推定プログラム
【課題】画像内に大きな物体が存在しても正確に自車移動パラメータを推定することができる自車移動推定方法および自車移動推定プログラムを提供する。
【解決手段】本発明の一実施形態に係る自車移動推定方法は、車両に設けられたカメラが所定のフレーム周期で前記車両の周囲を撮像するステップと、前記カメラにより撮像された複数の画像間の動きベクトルを検出するステップと、検出された動きベクトルから自車の移動パラメータを求めるステップと、前記自車の移動パラメータを求める際に利用された前記複数の画像の撮像の後に前記カメラにより撮像された画像を用いて新たに動きベクトルを検出するステップと、前記新たに検出された動きベクトルのうち、前記自車の移動パラメータに対応する自車の移動ベクトルとの比較で所定の閾値以内であるものを背景ベクトルとして検出するステップと、この背景ベクトルを用いて新たに自車の移動パラメータを求めるステップと、を有する方法である。
(もっと読む)
勾配推定装置、勾配推定方法、及び勾配推定プログラム
【課題】路面が他の物体に覆われていても路面の勾配を算出することができる勾配推定装置、勾配推定方法、及び勾配推定プログラムを提供する。
【解決手段】特徴点抽出部は、撮影手段が撮影した画像上の特徴点を抽出し、物体検知部は、前記撮影手段が撮影した画像から物体を表す画像を検知し、勾配算出部は、物体検知部が検知した物体を表す画像における特徴点抽出部が抽出した特徴点の座標と、特徴点の座標の予め定められた時間における移動量と、に基づいて、物体が位置する路面の勾配を算出する。
(もっと読む)
21 - 40 / 2,764
[ Back to top ]