
Fターム[5L096CA04]の内容
Fターム[5L096CA04]に分類される特許
81 - 100 / 2,764
移動体追跡装置、移動体追跡方法及びプログラム
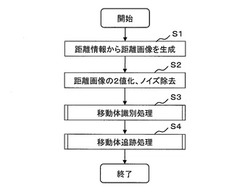
【課題】距離画像によって構成される動画像を解析し、移動体を追跡する場合において、移動体同士が接触或いは重複していたとしても、各移動体を区別して追跡することができる移動体追跡装置等を提供する。
【解決手段】移動体追跡装置1は、距離情報から距離画像を生成し(S1)、距離画像の2値化、ノイズ除去を行い(S2)、撮影時刻が隣接する2つの距離画像から各々移動体領域を1つずつ特定し、特定された2つの移動体領域の組ごとに重複領域を抽出し、重複領域の面積情報が所定値以上であった場合には移動体領域の組が同一の移動体であると判定し(S3)、同一の移動体であると判定された移動体領域の組について、移動体の移動位置を追跡する(S4)。
(もっと読む)
被写体3次元領域推定方法およびプログラム

【課題】同期撮影された複数のカメラ映像を統合的に扱うことで、被写体3次元位置推定の精度を向上させる。
【解決手段】初期フレームにおける被写体の3次元世界座標と、複数のカメラで撮影された複数フレームのカメラ画像とから、前記初期フレームにおける被写体の3次元世界座標を特定平面上のXY座標に射影し、前記特定平面上の被写体のXY座標を時間軸情報に基づき推定し、前記特定平面上の被写体のXY座標をカメラ間情報に基づき評価することで、後続フレームにおける被写体の3次元世界座標を推定する。
(もっと読む)
画像処理装置、方法、プログラム、および監視システム
【課題】監視対象者の一定時間の行動状態を把握する。
【解決手段】短背景生成部123が、滞在者が動くとき、滞在者の当該動いた部分がフレーム間で撮像画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの撮像画像から短背景画像を生成し、背景生成部124が、滞在者がフレーム間で短背景画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの短背景画像から背景画像を生成し、変化検出部125が、短背景画像と撮像画像の差分から変化抽出画像を生成する。そして、継続検出部126が、短背景画像と背景画像の差分から継続抽出画像を生成し、滞在者検出部122が、変化抽出画像と、継続抽出画像から監視対象者である滞在者の状態を示す情報を算出する。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
閉瞼を分類するための方法
【課題】乗り物の操作者コンパートメント内に位置決めされた操作者を監視する画像センサからの生理学的データの部分の信頼性を向上させる
【解決手段】画像センサから、操作者の目、顔、頭、腕、および身体の動きのうちの少なくとも1つに関係する情報を包含する生理学的データを受信するステップと、前記生理学的データに基づいて、少なくとも操作者の閉瞼、目の動き、または頭の動きの徴候の識別を行なうステップと、生理学的データおよび操作者コンパートメント内における照明条件のうちの少なくとも1つと、現在の操作者の状態についてのあらかじめ決定済みの規則のセットとの比較を行なうステップと、閉瞼、目の動き、および/または頭の動きのタイプを、識別による閉瞼、目の動き、および/または頭の動きと比較の結果を相関させることによって分類するステップと、を包含する。
(もっと読む)
オブジェクト追跡装置
【課題】ズーム処理によって対象オブジェクトのサイズが変化しても、高速かつ高精度に対象オブジェクトを追跡することができるオブジェクト追跡装置を提供する。
【解決手段】探索領域設定部9は、現時点のフレーム画像のズーム倍率が前時点のフレーム画像のズーム倍率と異なる場合には、前時点のフレーム画像におけるオブジェクト領域、前時点のフレーム画像におけるズームの中心座標、前時点のフレーム画像のズーム倍率と現時点のフレーム画像のズーム倍率との比に基づいて、現時点のフレーム画像におけるオブジェクトの探索領域を設定する。正規化部10は、現時点のフレーム画像に含まれるオブジェクトの探索領域の画像を固定サイズに正規化する。マッチング部11は、正規化された探索領域の画像の中から、テンプレート画像と類似するオブジェクト領域を検索する。
(もっと読む)
移動物体追跡装置及び参照点追跡方法
【課題】移動物体上のある点に対して移動物体の移動速度方向から所定角度だけ回転した方向に所定長離れた点の位置を精度良く把握可能な移動物体追跡装置を提供する。
【解決手段】移動物体の所定の部位を画像追跡点として撮像し、取得した画像追跡点の画像データより、追跡のための追跡原点座標と移動物体の画像追跡点の座標との差異を表す追跡誤差を得る。この追跡誤差に基づいて、追跡角速度に移動物体に対する撮像器の追従遅れを補正した視軸角速度を算出する。同時に、移動物体との間の相対距離と、移動物体追跡装置自身の移動速度を計測する。得られた視軸角速度と相対距離と移動物体追跡装置自身の移動速度に基づいて、画像追跡点から移動物体の移動速度方向から所定の角度だけ回転した方向に所定長さだけ離れた参照点を追跡するための参照点追跡角度を算出する。
(もっと読む)
情報処理装置及びプログラム
【課題】一般物体認識により対象物の認識を行う情報処理装置において、当該対象物の読みこぼしを低減することが可能な情報処理装置及びプログラムを提供する。
【解決手段】対象物が載置される載置台の載置面を異なる複数の撮像方向から撮像する第1撮像手段と、前記第1撮像手段により前記複数の撮像方向の各々で撮像された第1撮像画像の各々から、当該第1撮像画像に含まれた前記対象物を表す対象画像の特徴量を読み取り、予め記憶された各対象物の特徴量と比較することで、当該対象画像に対応する対象物を前記第1撮像画像毎に認識する認識手段と、前記第1撮像画像毎での前記対象画像の認識結果に基づいて、前記載置台に載置された前記対象物の認識結果を決定する決定手段と、を備える。
(もっと読む)
面法線計測装置、面法線計測システム及び面法線計測プログラム
【課題】物体表面の反射特性に鏡面反射成分を含むことを必要とせず、物体表面までの距離の計測も必要とせずに面法線を計測する。
【解決手段】面法線計測システム1は、ガイドレールRx,Ryに沿って、互いに直行する平面内を移動して物体OBJに対する照明方向を変化させる照明装置30と、物体OBJを撮影する撮影装置40と、撮影装置40によって撮影された画像に基づいて物体OBJの表面の面法線を計測する面法線計測装置10とを備える。面法線計測装置10は、物体OBJの画像を2値化し、画素ごとに、照明方向と明暗とが対応付けられた陰影ベクトルを作成し、予め形状が既知の参照物体について作成した参照陰影ベクトルと面法線とが対応付けられたデータベースを参照して、物体OBJの陰影ベクトルと最も類似する参照陰影ベクトルに対応付けられた面法線を、その画素における面法線と推定する。
(もっと読む)
オブジェクト検出装置
【課題】複数個のオブジェクトを高速に検出することが可能なオブジェクト検出装置を提供する。
【解決手段】分割部2は、複数個の検出対象オブジェクトについての全検出処理をM個に均等に分割する。設定部3は、連続して入力されるM個のフレーム画像のうちの各々のフレーム画像での検出処理を、分割されたM個の検出処理のうちの1つに設定する。検出部6は、各フレーム画像において、設定された検出処理を実行する。選択部5は、M個のフレーム画像のうちのいずれかで、いずれかのオブジェクトを検出した場合に、複数個の検出対象オブジェクトの中から検出されたオブジェクトと同一および関連する1以上のオブジェクトを選択する。分割部2、設定部3、検出部6は、選択されたオブジェクトについて再分割、再設定、再検出を行なう。
(もっと読む)
オブジェクト探索装置、映像表示装置およびオブジェクト探索方法
【課題】簡易な手順で高速かつ精度よくオブジェクトを探索できるようにする。
【解決手段】一実施形態に係るオブジェクト探索装置1は、画面フレームを複数に分割した複数の分割フレーム領域を一つずつ順に探索領域として設定する探索領域設定手段3と、分割フレーム領域に含まれるオブジェクトを探索して、探索されたオブジェクトの座標位置を検出するオブジェクト探索手段4と、探索されたオブジェクトの座標位置を基準として、過去と現在の画面フレームを比較して動き検出を行い、現在の画面フレームでのオブジェクトの座標位置を検出するオブジェクト追従手段5と、探索されたオブジェクトの座標位置と追従されたオブジェクトの座標位置とを比較して、重複する座標位置を削除して、オブジェクトの座標位置を特定する座標合成手段6と、を備える。
(もっと読む)
動き検出装置
【課題】移動する測定対象物が加速、減速した場合であっても該測定対象物の速度を高精度に測定することが可能な動き検出装置を提供する。
【解決手段】撮像部11で撮像される画像の各画素に、測定対象物の測定対象物が存在した場合に、投票値を付与する。そして、積算された投票値が増加する場合には、測定対象物は減速しているものと判断し、他方、積算された投票値が減少する場合には、測定対象物は加速しているものと判断する。そして減速している場合には、特徴領域に対応する画素の投票値に、所定の補正値を加算することにより、実際の速度を反映した投票値に補正する。また、減速している場合には、特徴領域に対応する画素の投票値から所定の補正値を減算することにより、実際の速度を反映した投票値に補正する。
(もっと読む)
動き検出装置
【課題】測定対象物の移動方向が変化した場合であっても、これを即時に検出して測定対象物の移動速度を求めることが可能な動き検出装置を提供する。
【解決手段】特徴領域に対応する画素の投票値のうち、中央の画素にピークが存在する場合には、測定対象物の移動方向が反転したものと判断する。そして、移動方向が反転した場合には、各特徴領域に対応する画素の投票値のうち、方向変化前の影響による投票値と方向変化後の影響による投票値に分類する。そして、方向変化後の影響による投票値に基づき、これを補正して測定対象物の速度を算出する。従って、測定対象物の移動方向が変化した場合には、これを即時に認識し、測定対象物の移動速度検出に反映させることが可能となる。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
ユーザ凝視データに基づいた時空間データのセグメント化
【課題】ビデオデータを簡単にセグメント化する。
【解決手段】ユーザにセグメント化タスクを特定し、時空間データを複数フレームとして見ているユーザの目の動きをモニタして生成された凝視データを受信する。凝視データはフレーム全体に渡るユーザの凝視に基づく固定位置を含む。フレーム中の第1および第2のフレームを固定位置に基づいて選択する。第1および第2のフレームに関連する興味ある領域に基づいて第1および第2のフレーム上でセグメント化を実施し、これらのフレームから第1および第2のオブジェクトをセグメント化する。興味ある領域は固定位置の1個に相当する。第1および第2のオブジェクトがセグメント化タスクに関連するか否かを決定し、関連する場合第1および第2のオブジェクトが生成されると、第1のオブジェクトを第2のオブジェクトに関連付けるため関連データを生成する。
(もっと読む)
コミュニケーション支援システム
【課題】誤認識の場合でも誤ったメッセージが話し相手に伝わることを避けることができる発話障害者のための、あるいは異なる言語間の通訳のための、読唇技術を利用した実用性の高いコミュニケーション支援システムを提供する。
【解決手段】事前に登録した発話内容の中から話し相手に伝えたい発話内容を、その口唇の動きに基づきその特徴量をリアルタイムに計測し、この計測された特徴量とデータベースに登録されている特徴量を比較して、発話内容を判断して認識結果をコントローラに出力する。コントローラの指示に基づき正しい認識結果を出力部に出力する。
(もっと読む)
物体検出方法
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
眼球検出システムおよび眼球検出方法
【課題】ロバスト性が高く正確に対象者の眼球を検出可能な眼球検出システムを提供する。
【解決手段】本発明に係る眼球検出システム100は、ターゲット画像上での中心座標および拡大倍率を含む染色体を持つ個体の集団を生成する初期個体集団生成部120と、テンプレート画像180上の画素値と中心座標および拡大倍率によって指定されるターゲット画像上の画素値とに基づいて個体それぞれの適応度を算出する適応度演算部122と、中心座標および拡大倍率によって指定されるターゲット画像上の対象者の眼球領域198を基準として前額領域190、眉毛領域192、上眼瞼領域194または頬領域196を仮定する領域仮定部124と、これらの領域に基づいて適応度を修正した修正適応度を算出する修正適応度演算部126と、修正適応度に基づき遺伝的操作を実行する遺伝的操作実行部130と、を備えることを特徴とする。
(もっと読む)
指示光検出装置及び方法
【課題】撮像部によって指示光の位置を検出する構成において、環境光の影響を軽減して指示光の検出精度の向上を実現する。
【解決手段】遠隔指示器から射出される指示光(赤外光)が検出されていない期間(50が肯定)に、指示光の検出範囲内を定期的に撮像することで得られた背景画像をフレームメモリに上書き記憶しておき(52〜60)、指示光(赤外光)が検出されると指示光の検出範囲を撮像し(64)、背景画像との差分画像を生成し(66)、差分画像から高輝度領域を抽出し(68)、指示光領域の探索、位置の演算、出力を行う(76〜80)。
(もっと読む)
81 - 100 / 2,764
[ Back to top ]