
Fターム[5L096EA26]の内容
Fターム[5L096EA26]の下位に属するFターム
Fターム[5L096EA26]に分類される特許
1 - 20 / 31
文字列検知装置、画像処理装置、文字列検知方法、制御プログラムおよび記録媒体
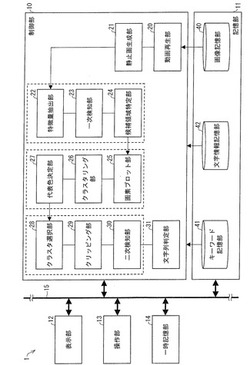
【課題】画像に対する文字列検知処理の検知精度の向上をさせる。
【解決手段】本発明の文字列検知装置は、1以上の文字からなる文字列を画像から検知する文字列検知装置において、上記画像を構成する各画素が有する色情報に基づいて、類似色を有する一定数以上の画素群からなるクラスタを少なくとも1つ定義するクラスタリング手段と、上記画像を、上記クラスタリング手段によって定義された上記クラスタに属する画素群の領域と、その他の画素群の領域とに分割して、上記画像から上記その他の画素群の領域が排除されたクリッピング画像を生成するクリッピング手段と、上記クリッピング手段によって生成されたクリッピング画像から、検知すべき文字列である検知対象文字列の各文字を検知することにより、該検知対象文字列を検知する文字列検知手段とを備えていることを特徴としている。
(もっと読む)
姿勢推定装置および姿勢推定方法

【課題】単眼カメラを用いた場合においても、あらゆる動作に対して姿勢推定を行うこと。
【解決手段】座標変換部103は、複数の部位座標点の画像データにおける座標を、予め保持されたカメラに関する幾何学的パラメータ情報に基づいて、人物に固有の3次元座標系である人物ローカル座標系における3次元部位座標へ変換する。姿勢推定部105は、複数の部位領域のうち第1の部位領域において、第1の部位領域に含まれる複数の部位座標点のうち尤度値が最大となる部位座標点の3次元部位座標と、尤度値が最大となる部位座標点以外の部位座標点の3次元部位座標を含む所定の平面領域上の所定の座標とを通る直線を第1の骨直線と推定し、第1の骨直線と、第1の部位領域と隣接する第2の部位領域において推定された第2の骨直線との交点を、人物の関節位置と推定する。
(もっと読む)
道路認識装置及び道路認識方法
【課題】道路標示の認識率を向上させることができる道路認識装置及び道路認識方法を提供すること。
【解決手段】本発明にかかる道路認識装置100は、画像変換部101、画像重ね合わせ部103、画像認識処理部105を備える。画像変換部101は、車両の移動中に複数のタイミングで車載カメラ90により撮像された道路面の複数のカメラ画像を複数の鳥瞰画像に変換する。画像重ね合わせ部103は、複数の鳥瞰画像の位置合わせをするとともに、複数の鳥瞰画像の一部の領域を重ね合わせ、当該重ね合わせた領域において、それぞれの鳥瞰画像の画素値を加算して合成鳥瞰画像を生成する。画像認識処理部105は、合成鳥瞰画像に基づいて、道路面に表示された道路標示を認識する。
(もっと読む)
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
計算機システム、及び画像/図表を位置合わせする方法
【課題】異なる属性を持つ画像及び図表を位置合わせするための特徴量を自動的に求める。
【解決手段】画像と図表との位置合わせをする計算機システムであって、演算部と、記憶部と、入力部と、データ記録部と、を備え、前記受け付けた画像及び図表を前記記憶部から読み出し、前記読み出された画像及び図表の各々をサンプル点を中心とした複数の領域に分割し、前記分割された領域の特性を判定して前記画像及び図表の特徴パターンのセットを生成する特徴パターン生成部と、前記生成された特徴パターンを比較することによって、前記位置合わせをする画像及び図表の対応関係を計算する関係計算部と、前記計算された対応関係に基づいて、前記位置合わせをする画像及び図表の少なくとも一つの座標系を変換する変換部と、前記座標系が変換された画像及び図表を結合する結合部と、を含む。
(もっと読む)
3次元形状の骨格モデル作成方法及び装置並びに3次元形状の寸法測定方法及び装置
【課題】本発明は、対象物体の3次元形状データに基づいてその特徴的な部位を正確に設定できる3次元形状の骨格モデルの作成方法及び装置並びに骨格モデルを用いた3次元形状の寸法測定方法及び装置を提供することを目的とするものである。
【解決手段】骨格モデル作成装置の制御部1は、対象物体表面の3次元形状データを取得するデータ取得部10、取得した3次元形状データを主成分分析により主軸を算出して予め設定された座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部11、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部12、抽出した各輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部13、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部14を備えている。
(もっと読む)
監視システムおよび監視方法
【課題】監視カメラで撮影した群集の映像から、汎用的に、定常/非定常を含む様々な状態を検出することができる監視システムを提供する。
【解決手段】監視システムMSは、群集の映像を撮影し入力する映像入力手段1と、入力した映像から、オプティカルフローを算出するオプティカルフロー算出手段2と、映像上の領域を、非定常判定する単位のブロックに区切っておく判定ブロック設定手段3と、各判定ブロック内で発生するオプティカルフローの属性を集計するオプティカルフロー属性集計手段4と、集計したオプティカルフローの属性から、当該判定ブロックの定常度を評価する評価指標を算出する定常度評価指標算出手段5と、評価指標の値から当該判定ブロックの非定常状態を判定する非定常状態判定手段6と、判定した定常もしくは非定常状態を、映像上に描画しモニタもしくは記録手段に出力する出力手段7とを備えている。
(もっと読む)
車両周囲監視装置および車両周囲監視方法
【課題】高精度の障害物検出を低コストで実現する事ができる車両周囲監視装置を提供する事。
【解決手段】車両周囲監視装置100は、車両の車載カメラによる撮影画像に対して画像認識を行い、撮影画像とは別の基準カメラで障害物を撮影して得られた基準画像との間の形状の一致性に基づいて車両の周囲の障害物の検出を行う装置であって、撮影画像を、基準カメラの視点に対応する位置から見たときの見え方に近似した画像に変換する画像変換部140と、変換された撮影画像に対して基準画像に基づく画像認識を行い、障害物の検出を行う画像認識部150とを有する。
(もっと読む)
二次元運動に基づいて相対的三次元速度及び加速度投射関数を推定するデータ・マイニング方法及びシステム
【課題】
【解決手段】 空間の第1の画像から空間の第2の画像にデータを変換するために使用される変換行列を決定する方法が開示される。この方法は、空間を監視するビデオカメラから画像データを受け取る段階であって、ビデオカメラは、空間内を運動するオブジェクトの画像データを生成する段階と、画像データからカメラの視野に対するオブジェクトの時空的位置を決定する段階とを含む。この方法は、更に、オブジェクトの時空的位置に基づいてカメラの視野に対するオブジェクトの運動の観察属性を決定する段階を含み、観察属性は、カメラの視野に対するオブジェクトの速度と、カメラの視野に対するオブジェクトの加速度の少なくとも一方を含む。この方法は、また、オブジェクトの運動の観察属性に基づいて変換行列を決定する段階を含む。
(もっと読む)
追跡方法
本発明は、フレーム・シーケンス内の少なくとも1つの物体を追跡する方法であって、各フレームが画素アレイを有し、深さ値が各画素に関連付けられている方法に関する。この方法は、各フレームの前記画素の少なくともいくつかを複数の領域にグループ分けするステップと、前記領域を、相互接続された領域のクラスタB1,…,B5にグループ分けするステップと、2次元投影で別のクラスタB1に隣接する少なくとも1つのクラスタB2,…,B5が前記別のクラスタB1の深さ値よりも高い深さ値を有する場合に、少なくとも1つのクラスタB2,…,B5が前記別のクラスタB1によって部分的に遮蔽されている物体に属すると判断するステップを含む。 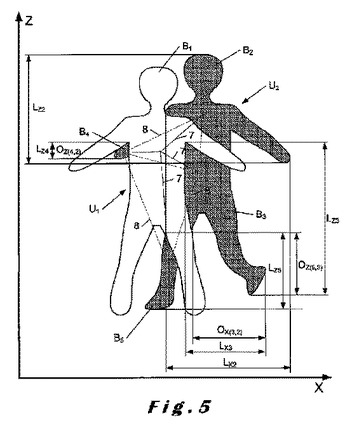 (もっと読む)
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】3次元オブジェクトを上方から撮影した画像に含まれている円筒状または円柱状の3次元オブジェクトを検出するための計算コストを減らすことができる。
【解決手段】3次元オブジェクト抽出部13は、画像に含まれる3次元オブジェクトを抽出する。円形図形検出部100は、上面領域の画像の低解像度画像を用いて円形図形のエッジと前記円形図形の中心点とを検出する。また、円形図形検出部100は、円形図形のエッジと円形図形の中心点とに基づいて、画像の領域のうち円形図形が含まれる領域を設定する。また、円形図形検出部100は、円形図形が含まれる領域の画像を用いて円形図形のエッジと中心点と半径とを算出する。3次元位置姿勢計算部21は、3次元オブジェクト抽出部が抽出した3次元オブジェクトのうち、円形図形の中心点と半径とに基づいて、上面が円形状である円筒または円柱状の3次元オブジェクトの形状を検出する。
(もっと読む)
画像の少なくとも1つの特徴として記述子を提供する方法及び特徴をマッチングする方法
【解決手段】画像の少なくとも1つの特徴として記述子を提供する方法であって、キャプチャ装置によってキャプチャされた画像を提供し、及び前記画像から少なくとも1つの特徴を抽出する工程と、記述子を前記少なくとも1つの特徴に割り当てる工程とを備え、前記記述子が、方位を示す少なくとも1つのパラメータに応じており、前記少なくとも1つのパラメータが、少なくとも1つのトラッキングシステムから決定される。また、本発明は、2つ以上の画像特徴をマッチングする方法にも関連する。 (もっと読む)
消失点推定装置およびプログラム
【課題】撮像画像から単一の直線しか検出されない場合であっても、計算量を増大させることなく、安定して消失点の位置を推定可能な消失点推定装置を提供する。
【解決手段】直進判定部48にて自車両が直進していると判定されると、直線検出部42は、画像処理部41の特徴点抽出処理によって撮像画像から抽出された特徴点から画像中の直線を検出し、その直線を表すパラメータ(直線情報)を算出する。交点算出部44は、現在の推定サイクルで直線検出部42にて算出された直線情報から特定される今回直線同士の交点の位置、及び、直線情報記憶部43に記憶されている前回の推定サイクルで算出された直線情報から特定される過去直線と今回直線との交点の位置を算出する。計数部45は、交点算出部44にて算出された交点の位置の出現頻度を、X軸方向,Y軸方向のそれぞれについて計数し、計数結果である頻度分布から画像中の消失点の位置を推定する。
(もっと読む)
画像監視装置
【課題】複数の撮像部により撮像された画像から検出された人物位置の情報を統合するときに同一人物の人物位置を別人物と誤る又は他人の人物位置を同一人物と誤る問題があった。
【解決手段】座標変換手段330は共通座標系に人物位置を座標変換し、投影線算出手段331は人物位置への投影線を算出し、経路長算出手段332は同時に撮像された監視画像の一方から検出された人物位置A1への投影線CAM1−A1上、及び他方の監視画像から検出された人物位置A2への投影線CAM2−A2上を通る当該人物位置間の経路長(D1+D2)を算出し、同様に人物位置A1とB2の間の経路長(D3+D4)を算出し、人物位置統合手段333は経路長がより短いペア「A1とA2」を他のペア「A1とB2」よりも優先的に同一人物の人物位置としてまとめることで人物位置の情報を統合する。
(もっと読む)
画像における変化した可能性のあるオブジェクトの検出
第1の画像と第2の画像とが、少なくとも部分的に重なり合っている場合に、第1の画像と第2の画像とにおいて、変化した可能性のあるオブジェクトを検出する方法である。当該方法は、第1の画像(203A)を記述しているデータと第2の画像(203B)を記述しているデータとを得て、画像の中のオブジェクトの組を検出することを含む。オブジェクトの組に対する共通座標系を計算する。オブジェクトの場所に基づいて、組の中のオブジェクトを削除して、更に、画像の重なり合うエリアの外部のオブジェクトを削除する。組の中のゼロ以上の残りのオブジェクトを示すデータ(217)を出力して、変化した可能性のあるオブジェクトを示す。 (もっと読む)
物体運動推定装置、物体運動推定方法、物体運動推定プログラムおよびそのプログラムを記録した記録媒体
【課題】1台以上のカメラで得た映像から空間中での速度を推定し、複数の被写体あるいは人物の動き表す速度場を生成できる物体運動推定装置を提供する。
【解決手段】 空間中のある位置Xに用意した被写体上の3次元点を前記カメラで取得した画像中に投影したときの、当該3次元点の座標の変化に対する画像座標上での座標の変化量を得る勾配係数処理部3と、時系列中のある時刻tでの画像上における水平方向と垂直方向の濃淡変化を反映した空間勾配と、時間間隔Δtとして時刻t+Δtでの画像との間の時間的濃淡変化を反映した時間勾配を得る時空間勾配処理部2と、前記空間勾配、時間勾配、画像座標上での変化量が満たす時間間隔Δtの間の拘束条件を満たす場合に、投票空間としての速度マップ中のその速度の場所に投票を行い、その得票値が極大となる速度を位置Xでの被写体の速度と決定する物体速度推定部4とを備える。
(もっと読む)
三次元位置姿勢計測方法および装置
【課題】物体(対象物)の画像教示なしに、1台のカメラで物体の位置と姿勢を正確に検出することができる三次元位置姿勢計測方法および装置を提供する。
【解決手段】対象物1のモデルデータ5を予め記憶するモデル入力ステップS1と、検出する対象物を撮影して画像2を取得する画像撮影ステップS2と、画像2からモデルデータに対応する画像上の特徴データ6を抽出する特徴抽出ステップS3と、モデルデータと画像上の特徴データとの幾何学的一致度を評価する一致度評価ステップS5と、モデルデータが幾何学的一致度の高い画像上の特徴データの位置に移動するように座標変換式を算出する座標変換ステップS7と、座標変換式により対象物1の三次元位置姿勢を決定する位置姿勢決定ステップS8とを有する。
(もっと読む)
移動距離検出装置及び移動距離検出方法
【課題】異なる時点で撮像した2つの画像から車両の移動距離を検出する場合に、移動距離の検出を簡単に且つ精度よく行うことができる移動距離検出装置及び移動距離検出方法を提供する。
【解決手段】類似度計算部11は、時間間隔保持部12から取得した時間間隔Tに応じて、画像バッファ3から現在時刻tの画像と、現在時刻tから時間間隔Tを隔てた時刻(t−T)の画像とを読み出す。時刻(t−T)の画像からテンプレートエリアを抽出すると共に、対応位置保持部14から前回の対応位置を取得して今回の探索範囲を決定する。決定した探索範囲の各位置でテンプレートエリアとの類似度を計算し、計算結果を基に対応位置判定部13がテンプレートエリアの対応位置を判定して、判定結果を対応位置保持部14に保持すると共に移動距離検出部7へ与える。移動距離検出部7は、与えられた対応位置を基に移動距離を検出する。
(もっと読む)
オブジェクト認識装置及びオブジェクト認識プログラム
【課題】学習用画像の解像度の減少度合いに関する指標を設定し、学習用画像として採用するために適正な解像度を判定する。
【解決手段】画像取得手段から学習用標準パターンを取得し、その学習用標準パターンを変形し、その変形された学習用パターンを低解像化して学習用パターンを生成し、その学習用パターンから特徴量を抽出する装置201と、前記抽出された特徴量に基づいて各カテゴリの部分空間を生成する部分空間生成装置202と、前記生成された各カテゴリの部分空間の相関関係から学習用パターンの有する解像度が適性か否かを特定の閾値に基づいて判定する装置203と、その適性と判定された解像度を有する学習用パターンから作成された部分空間に基づいて、その学習用パターンが属するカテゴリを認識する装置204と、を用いて、オブジェクトを認識する。
(もっと読む)
画像変換パラメータ演算装置及び画像変換パラメータ演算方法
【課題】比較的少ない計算量で最適な変換パラメータの抽出を可能とする画像変換パラメータ演算方法を提供する。
【解決手段】緩和欲張り探索とモンテカルロサンプリングを用いた加速プロセスの2つの手法を用いてアフィンパラメータの探索空間を探索することで、最適な変換パラメータの抽出を行う。欲張り探索は、最終的に最適解になると見込んで、各時点においての最適な選択を行う手法である。緩和欲張り探索は、選択関数を用いて、一つ乃至複数の最適解候補を選択する緩和探索である。また、モンテカルロサンプリングは、統計的なサンプリング法であり、探索過程を加速することができる。
(もっと読む)
1 - 20 / 31
[ Back to top ]