
Fターム[5L096EA39]の内容
Fターム[5L096EA39]に分類される特許
21 - 40 / 357
オブジェクト追跡方法及びオブジェクト追跡装置
【課題】オブジェクト追跡方法及び装置を提供する。
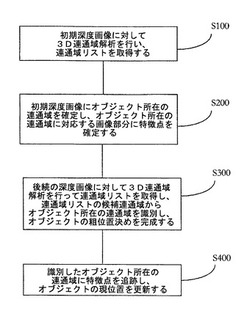
【解決手段】かかる方法は、入力された初期深度画像への3次元の連通域解析を行い、初期深度画像の連通域リストを取得する連通域取得ステップと、初期深度画像におけるオブジェクトの既知の現位置からオブジェクト所在の連通域を決定するとともに、該連通域に対応する画像部分におけるn個特徴点(nは自然数)を決定する初期オブジェクト決定ステップと、前記初期深度画像後に入力される後続の深度画像の3次元の連通域解析を行い、前記後続の深度画像の連通域リストの各候補連通域から、前記オブジェクト所在のオブジェクト連通域を識別する追跡ステップと、前記追跡ステップで識別されたオブジェクト連通域から、前記n個特徴点を追跡し、前記オブジェクトの現位置を更新するオブジェクト位置決めステップとを有する。
(もっと読む)
直線検出装置および直線検出方法

【課題】画像内の方向や位置に依存することなく、同様の基準で、ハフ変換を利用した直線検出処理を行うことを課題とする。
【解決手段】ハフ変換部14は、輪郭強調された2値画像データ104に対してハフ変換を実行する。ハフテーブル15には、ハフ変換後の集計値が格納される。直線算出部161は、2値画像データ104内の各直線について、各直線が2値画像データ104を切り取るときの交点を求め、交点間距離Lenを算出する。正規化部162は、ハフテーブル15に格納された集計値を交点間距離Lenで除算し、集計値を正規化する。直線検出部16は、正規化された集計値に基づき、直線を検出する。
(もっと読む)
物体識別装置
【課題】物体を識別するための計算量を低減すると共に、識別性能を向上させることができる物体識別装置を提供する。
【解決手段】学習処理部4は、コードブックの各小領域画像パターンにつき、物体のクラス番号及び位置情報と出現確率との関係を表す関数テーブルを生成し、各クラス間における特徴量の共用度を表すシェアリングマトリクスを求め、特徴量が類似するクラス同士をまとめた樹形図を作成し、小領域画像パターン毎に樹形図の各ノードの重みを計算する。認識処理部7は、カメラ2で取得した撮像画像データをコードブックと照合し、複数の小領域画像パターンのうち最も近い小領域画像パターンを選択し、その小領域画像パターンについて重みが閾値以上となるノードの中で重みが最も小さいノードに係るクラスを抽出し、そのクラスに対して小領域画像パターンの位置情報を投票して、物体を認識する。
(もっと読む)
画像処理方法および画像処理装置
【課題】迅速かつ有効的に画像ピクセルの顕著性値を分析して、画像における重要物体領域を均一的に表現する。
【解決手段】本発明は、領域のコントラストに基づいて画像の視覚的顕著性を検出する画像処理方法と画像処理装置に関するものである。当該方法は、自動分割アルゴリズムを用いて入力画像を複数の領域に分割する分割ステップと、前記複数の領域のうちの一つの領域とその他の領域との色、の差分の重み付き和を利用して、当該領域の顕著性値を算出する算出ステップとを含む。
(もっと読む)
学習装置および方法、並びにプログラム
【課題】より高速に高精度な識別器を得ることができるようにする。
【解決手段】特徴量計算部は、学習画像の各特徴点から特徴量を抽出する。取得部は、既に学習により得られた識別器を転移識別器として取得する。識別器生成部は、転移識別器を構成する弱識別器に特徴量を代入し、それらの弱識別器の識別結果と学習画像の重みとに基づいて弱識別器の誤り率を算出するとともに、誤り率が最小となる弱識別器を選択する処理を複数回、繰り返し行う。また、識別器生成部は、選択した複数の弱識別器を線形結合することで、検出対象を検出するための識別器を生成する。本発明は、学習装置に適用することができる。
(もっと読む)
認識装置、認識方法及びプログラム
【課題】学習画像にあまり含まれない特徴パターンを含む画像が入力された場合においても、被写体を安定して検出することができるようにする。
【解決手段】入力画像から複数の特徴量を算出する特徴算出手段と、前記特徴量の夫々について事前に収集した画像及びその重みから認識対象に対する尤度を出力するように生成した認識モデルを用いて前記特徴量の尤度を求め、前記入力画像が前記認識対象かどうかを判定する判定手段とを備え、前記判定手段は、前記特徴量の値に該当する学習画像数が所定の値よりも少なく、かつ前記尤度の確信度が所定の値よりも高い場合に前記尤度の確信度が低くなるように補正する。
(もっと読む)
画像処理装置、画像処理方法
【課題】 認識対象物を識別するために有用な部分を効率的に学習する為の技術を提供すること。
【解決手段】 認識対象物をそれぞれ異なる視点位置から撮像して得られる複数枚の画像を取得し、複数の画像のそれぞれについて、該画像上に映っている認識対象物上で設定された箇所を設定箇所として受け付ける。複数の画像のそれぞれについて、該画像上の設定箇所に対して非設定箇所よりも多くの数の特徴点が設定されるように該画像上に複数の特徴点を設定し、特徴点における画像特徴量を用いて認識対象物を学習する。
(もっと読む)
画質評価
【課題】画像の画質を予測するコンピュータで実行するシステム及び方法を開示する。
【解決手段】入力画像に関して、この方法は、画像に関する意味内容情報に基づいて第一の記述子を生成する工程と、画像から抽出される美的特徴に基づいて第二の記述子を生成する工程とを含む。第一の記述子及び第二の記述子に基づいて訓練されて品質値を画像割り当てるカテゴライザを用いて第一の記述子及び第二の記述子に基づいて品質値を画像に割り当て、出力する。
(もっと読む)
パターン認識装置、パターン認識方法及びプログラム
【課題】より信頼度の高いパターンの認識結果を得ることができるようにする。
【解決手段】入力データから複数の部分データを抽出し、前記抽出した複数の部分データそれぞれに対して、予め登録されている登録データの対応する部分データとの間で類似度を算出し、前記算出された複数の類似度を、学習されたパラメータを用いて、それぞれ複数の変換後類似度に変換する。このとき、入力データが登録データと同一のカテゴリに属するデータである場合に算出される類似度と、入力データが登録データと異なるカテゴリに属するデータである場合に算出される類似度とを差別化させるように学習されたパラメータを用いて変換する。
(もっと読む)
パターン選択装置、パターン選択方法、およびプログラム
【課題】候補パターンの偏りを防ぎ、効率的でバランスの良い候補パターンの選択を可能とする
【解決方法】本実施形態のパターン選択装置は、第1のパターン群と第1のパターンの評価に用いられる第2のパターン群とを格納した記憶部と、第2のパターンを参照して、第1のパターンの複数の評価値として、第1のパターンが第2のパターンをパターン認識する際の貢献度である第1の評価値と、第1のパターンが、第1のパターンが所属するクラスにおける標準的なパターンであるかを評価する第2の評価値、および第1のパターンがクラスの境界付近のパターンであるかを評価する第3の評価値を算出する評価値算出部と、算出された評価値と評価値ごとの重み付け情報とを用いて、第1のパターンごとのスコアを算出するスコア算出部と、算出されたスコアに基づいて第1のパターンからパターンを選択するパターン選択部と、を備える。
(もっと読む)
電子機器及び抽出方法
【課題】動画像から、ある動きをする物、人、動物などを簡便に抽出する。
【解決手段】電子機器1は、オブジェクトの動きを表現するリズム情報の類似度に基づいて動画像からオブジェクトを抽出する電子機器であって、オブジェクトの抽出に用いる抽出用リズム情報を取得する抽出用リズム情報取得部40と、抽出用リズム情報取得部40によって取得された抽出用リズム情報と、動画像内のオブジェクトのリズム情報との類似度を算出する算出部60と、算出部60によって算出された抽出用リズム情報との類似度が所定の閾値以上であるリズム情報として当該動きが表現されているオブジェクトを動画像から抽出する抽出部70とを備える。
(もっと読む)
属性推定装置
【課題】少ない現場サンプルで再学習することができる属性推定装置を提供する。
【解決手段】推定モデル保持部14で、属性推定を行うための推定モデルを保持し、顔属性推定部15で、推定モデル保持部14に保持されている推定モデルを用いて、入力された顔画像の属性推定を行い、学習サンプル抽出部19で、顔属性推定部15による属性推定結果のグループごとにサンプルデータを抽出する。このようにして、属性推定結果のグループごとにサンプルデータを求めるので、まんべんなく現場サンプルデータを抽出することができ、少ない現場サンプルデータで再学習することができる。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】軽い負荷で画像をトラッキングすることができるようにする。
【解決手段】トラッキングの対象であるオブジェクトを含む対象画像と、所定のフレームの対象画像と比較される比較領域の画像である比較画像との、第1の特徴量のマッチング度と第2の特徴量のマッチング度を所定の混合率で混合して得られる信頼度の、混合率を変化させた場合の和で表される評価値が計算され、評価値が最大になるときの混合率が求められる。評価値が最大になるときの混合率が設定された信頼度に基づいて対象画像に対応する画像が検出される。
(もっと読む)
異常パターンの発見
【課題】 異常パターン発見のための方法、システム及び製造物品を提供する。
【解決手段】 複数の異なるグリッドに分割されたビデオ・データ画像フィールドにおいてオブジェクトの移動の軌跡が追跡される。ビデオ・データから軌跡に関する大域的画像特徴を抽出し、これを学習軌跡モデルと比較して、学習軌跡モデルへの適合性の関数として大域的異常検出信頼度判定値を生成する。また、オブジェクト軌跡を含む画像フィールド・グリッドの各々についての局所的画像特徴を抽出し、これをグリッドについての学習特徴モデルと比較して、グリッドの学習特徴モデルへの適合性の関数として各々のグリッドについての局所的異常検出信頼度判定値を生成する。大域的異常検出信頼度判定値をグリッドについての局所的異常検出信頼度判定値に融合させて、追跡されるオブジェクトに関する融合異常判定とする。
(もっと読む)
物体検出装置及び方法、並びにプログラム
【課題】 検出性能を低下させずに車両周辺の物体を高速で検出する。
【解決手段】 物体検出装置10は、車両周辺を撮影した映像を、その映像から画像特徴を抽出した特徴映像に変換する映像変換部20と、特徴映像を複数の領域に分割して合成する映像分割合成部30と、合成映像を走査して第一の物体検出処理を行う第一物体検出処理部40と、第一の物体検出処理の結果から物体候補位置を求める物体候補位置指定部50と、物体候補位置に対して第二の物体検出処理を行う第二物体検出処理部60を備える。
(もっと読む)
顔検出方法および顔検出装置、ならびに、プログラム
【課題】顔検出の検出結果に基づき対象人物が口を覆う用具を装着しているか否かを判定可能とする。
【解決手段】画像から顔を検出し、検出された顔から口の特徴点を抽出して口の縦幅および横幅を求め、口の縦幅および横幅と、口について予め求められた標準の縦幅および横幅との第1の差分および第2の差分をそれぞれ算出し、第1および第2の差分の絶対値を取った値に対して閾値判定を行う。第1の差分が第1の閾値Th1未満であり、且つ、第2の差分が第2の閾値Th2未満である場合に、口が覆われていないと判定する。また、第1の差分が第1の閾値Th1である場合において、第2の差分が第2の閾値Th2以下で、且つ、第3の閾値Th3を超える場合には、口を開けた状態が検出されたものと見做し、口が覆われていないと判定する。
(もっと読む)
姿勢推定装置、姿勢推定システム、および姿勢推定方法
【課題】関節を有する物体の姿勢を高精度に推定することができる姿勢推定装置を提供すること。
【解決手段】姿勢推定装置100は、関節により接続された複数の部位を有する物体を撮影した画像データに基づいて物体の姿勢の推定を行う装置であって、姿勢毎に、部位の位置を規定する基準モデルを格納する基準モデル格納部140と、姿勢毎に、密集部分の重みが小さくなるように部位に対して重み付けを行う重み付け算出部150と、重み付けを適用して基準モデルと物体とを比較することにより、物体の姿勢を推定する姿勢推定部160とを有する。
(もっと読む)
姿勢状態推定装置および姿勢状態推定方法
【課題】関節を有する物体の姿勢状態を高精度に推定することができる姿勢状態推定装置を提供すること。
【解決手段】姿勢状態推定装置100は、関節により接続された複数の部位を有する物体を撮影した画像データに基づいて物体の姿勢状態の推定を行う装置であって、画像データから、部位の部位候補の抽出を行う部位候補抽出部140と、部位候補抽出部140により部位候補が抽出されなかった未抽出部位の一部が、部位候補抽出部140により部位候補が抽出された既抽出部位の陰になっているものと推定して、画像データから未抽出部位の部位候補の抽出を行う補完部位候補抽出部160と、抽出された部位候補に基づいて、物体の姿勢状態の推定を行う姿勢状態推定部170とを有する。
(もっと読む)
物体認識処理装置及び物体認識処理方法
【課題】バーコードラベルや無線タグが付されていない商品を画像認識処理により短時間で精度良く認識できるようにする。
【解決手段】撮像部10より撮像された認識対象物のカラー画像信号について、認識処理部20において、第1の認識処理部22により、上記カラー画像信号からHSV色空間に変換して、H(色相)情報とS(彩度)情報のカラーヒストグラムを作成し、上記認識対象物の第1の特徴情報として、予め作成されている基準のカラーヒストグラムと比較することにより上記認識対象物を認識し、また、第2の認識処理部23により、上記カラー画像信号に含まれる認識対象物の輝度情報からSIFT特徴量を抽出し、K−means法によるクラスタリングに対応したクラスを横軸としたヒストグラムを作成し、上記認識対象物の第2の特徴情報として、予め作成されている基準のヒストグラムと比較することにより上記認識対象物を認識する。
(もっと読む)
特徴抽出装置、特徴抽出方法、特徴抽出プログラム、および画像処理装置
【課題】ローカルバイナリパターンを用いつつ、少ない処理負荷で、画質のばらつきに対してロバストな物体検出が可能な画像特徴を抽出することができる特徴抽出装置を提供すること。
【解決手段】特徴抽出部430は、画像から、複数の解像度の解像度画像を生成する解像度画像生成部433と、生成された解像度画像の全部または一部の画素毎に、周囲の近傍画素との画素値の差分が所定の閾値以上であるか否かをデジタル値により示すローカルバイナリパターンを生成するバイナリパターン生成部を含む解像度ヒストグラム生成部434と、複数の解像度画像から生成されたローカルバイナリパターンの分布を示すヒストグラムを生成するヒストグラム生成部436とを有する。
(もっと読む)
21 - 40 / 357
[ Back to top ]