
Fターム[5L096EA39]の内容
Fターム[5L096EA39]に分類される特許
81 - 100 / 357
画像検索装置
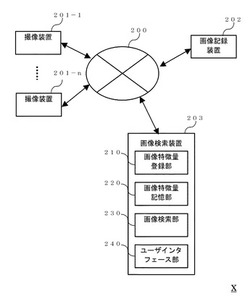
【課題】効率的に画像検索を行える画像検索装置を提供する。
【解決手段】撮像装置201−1〜201−nからの画像データを記録する画像記録装置202を備える。この上で、類似画像を検索する画像検索装置203を備える。画像特徴量登録部210は、前記画像データの特徴量を計算して登録する。画像特徴量記憶部220は、計算された前記画像データの特徴量を記憶する。また、画像検索部230は、入力された検索条件をもとに、前記画像の特徴量を使用して、画像の検索を行う。さらに、ユーザインタフェース部240は、入力された前記検索条件を画像検索部230に通知し、検索結果を表示する。この上で、画像検索部230は、画像特徴量を使用し、類似の画像検索を行い、検索された類似性の高い画像が検索された回数をカウントする。さらに、あらかじめユーザが指定した条件とカウント回数に応じて、ユーザインタフェース部240に表示を行わせる。
(もっと読む)
動作認識装置

【課題】背景、人の服装もしくは照明などの認識環境の変化、または、オクルージョンの発生に対してロバストな動作認識が可能な動作認識装置を提供する。
【解決手段】人体の各部位についての幾何学的構造による拘束条件と人体の複数の部位の共起動作に関する共起状態遷移パターンおよび共起タイミング構造パターンを含む共起動作モデルとを記憶する記憶部と、連続して入力される複数の画像データに基づいて、拘束条件にしたがって特定される、人体の各部位に対応する部位領域毎に、部位領域の移動方向を示す領域代表動きベクトルを算出する領域代表動きベクトル算出部と、複数の領域代表動きベクトルによる動作軌跡から、記憶部に格納された共起動作モデルに基づいて共起動作を認識する動作認識部とを有する。
(もっと読む)
写真画像評価方法、及び写真画像評価装置
【課題】多数の写真画像から様々なテーマに沿った品質の高い好適な写真画像を選択することができる写真画像評価方法、及び写真画像評価装置を提供する。
【解決手段】入力部から入力され記憶部に記憶された複数枚の写真画像に対応する各画像データを評価する基準となる評価値を付与する写真画像評価方法であって、各画像データからシーンを判別してシーン毎に設定した特徴量を抽出し、当該特徴量に基づいて各画像データに評価値を付与する写真画像評価ステップと、写真画像評価ステップで付与された評価値の最大値及び最小値が所定の基準範囲の最大値及び最小値となるように正規化した最終評価値を生成する評価値正規化ステップと、最終評価値を各画像データに関連付けて前記記憶部に記憶する評価値記憶ステップと、を含むステップが演算部により実行される。
(もっと読む)
ビデオデータ中のターゲットの追跡方法
画像処理装置、及び画像処理プログラム
【課題】場所によって健全部分の温度が異なる被撮像物を撮像して得た温度画像から、その被撮像物の変状部分を検出する画像処理装置を提供する。
【解決手段】被撮像物の温度画像データが有する複数の画素の温度値それぞれに対して、各画素の周辺の画素群の温度値をパラメータとして用いた平滑化処理を行って、該各画素の背景温度値を算出する第1処理部と、前記各画素の温度値から前記背景温度を減算又は除算する第2処理部と、前記減算又は除算して得られる値が所定の範囲外の画素を検出する第3処理部とを備えることを特徴とする画像処理装置。
(もっと読む)
判別器生成装置および方法並びにプログラム
【課題】マルチクラスの判別を行う判別器を生成するに際し、学習収束、安定性および判別性能が低い、並びに木構造判別器に応用できないというJoint Boostの欠点を解決して、学習の収束性および判別器の判別性能を向上させる。
【解決手段】検出対象画像から抽出した特徴量を用いて、検出対象画像に含まれるオブジェクトを判別する、複数の弱判別器が組み合わされてなる判別器であって、オブジェクトについて判別するクラスが複数あるマルチクラスの判別を行う判別器を生成する。その際に、複数のクラス間における弱判別器に、特徴量のみを共有する学習を行って判別器を生成する。
(もっと読む)
認識装置及びその制御方法、コンピュータプログラム
【課題】 照明変動が存在する環境においても対象物認識をより安定的に行うための技術を提供する。
【解決手段】 対象物の位置姿勢を認識する認識装置は、所定の照明条件で撮像装置により撮像された対象物の撮像画像を入力し、撮像画像を解析して画像中の複数の特徴部分を決定し、当該複数の特徴部分における画像の特性をそれぞれ示す複数の特徴量を抽出し、対象物上の複数の特徴部分のそれぞれにおける物理的性質を示す性質情報を入力し、撮像画像の撮像時における照明条件を示す照明情報を入力し、性質情報が示す物理的性質と、照明情報が示す照明条件とに基づいて、抽出した複数の特徴量の各々の重要度を決定し、複数の特徴量をその重要度で重み付けしたものに基づいて、対象物の位置姿勢を認識する。
(もっと読む)
パンの識別装置とそのプログラム
【課題】 画像認識によりパンの種類を正確に識別する。
【構成】 パンのカラー画像を内側領域のカラー画像と外側領域のカラー画像とに分割する。パンの画像からパンの輪郭に関する特徴量と、パンのテクスチャーに関する特徴量と、パンの内側領域のカラースペース内での特徴量と、パンの外側領域のカラースペース内での特徴量とを求め、パンの種類を識別する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】複数の画像を対象とした対応点の探索処理における精度の維持と速度の向上とを両立させることが可能な対応点探索技術を提供する。
【解決手段】次の処理が行われる。第1画像の第1領域が第1周波数成分情報に変換されるとともに、第2画像の第2領域が第2周波数成分情報に変換される。第1および第2周波数成分情報に基づき、第1領域と第2領域との相関を示す第1相関値が算出される。第1相関値に基づき、相関演算部での演算における周波数成分情報の使用が制限される周波数の使用制限範囲が設定される。第1画像に対応する第3画像の第3領域が第3周波数成分情報に変換されるとともに、第2画像に対応する第4画像の第4領域が第4周波数成分情報に変換される。第3および第4周波数成分情報のうちの使用制限範囲外の周波数に係る周波数成分情報に基づき、第3領域と第4領域との相関を示す第2相関値が算出される。
(もっと読む)
移動物体追跡システムおよび移動物体追跡方法
【課題】 複数の移動物体が複雑な動きをした場合であっても、良好な追跡結果を得ることができる移動物体追跡システムおよび移動物体追跡方法を提供する。
【解決手段】 人物追跡システムは、カメラ1で撮影した動画を画像インターフェース22により入力し、入力した各画像から追跡対象となる全ての人物の顔を顔検出部26により検出し、第1の画像から検出された顔と前記第1の画像に連続する第2の画像で検出される顔のうち同一人物の顔とを顔追跡部27により対応付けすることにより人物を追跡し、追跡処理の処理結果としてどのような基準で移動物体の追跡結果を出力するかを示すパラメータを設定し、設定されたパラメータに基づいて選別された移動物体の追跡結果を管理する。
(もっと読む)
画像処理装置及びプログラム
【課題】簡易な計算で、エッジデータのフィルタリング、補完、及び特徴抽出を行う。
【解決手段】エッジデータの各点に対して計算窓を設定し、エッジデータで表されたエッジを近似するNc次の関数の基底関数を表す行列B、及び計算窓内のエッジデータに対する重み行列Wで表され、かつNc次の関数の次数と同数の行数及び窓内の点の個数と同数の列数で表される行列Mを設定する。エッジデータの点毎に、行列Mの各行の要素と計算窓内の列で表されたエッジデータとの内積の各々を計算し、行列Mの1行目との窓内の列で表されたエッジデータとの内積をフィルタリング後のエッジデータとして、及び行列Mの(n+1)行目と窓内の列で表されたエッジデータとの内積をフィルタリング後のエッジデータのn次微分として出力する。また、フィルタリング後のエッジデータのn次微分を用いてエッジの特徴を抽出する。
(もっと読む)
対象物検出装置及びプログラム
【課題】遮蔽物により検出対象物の輪郭形状が損なわれている場合でも、精度良く対象物を検出する。
【解決手段】撮像装置12で撮像されコンピュータ16へ入力された撮像画像からウインドウ画像を抽出し、抽出されたウインドウ画像に識別モデルの部分特徴の各々に対応した部分領域を設定し、部分領域の各々に高輝度領域が含まれるか否かを判定し、高輝度領域が含まれない場合には、部分領域から抽出した特徴量に応じて高スコアまたは低スコアを付与し、高輝度領域が含まれる場合には、スコアとして0または高スコアと低スコアとの平均値を付与し、部分領域の各々のスコアを合計した合計スコアに基づいて、ウインドウ画像が検出対象の歩行者を示す画像であるか否かを識別する。
(もっと読む)
画像のマルチレベル分解を利用して画質計測値を決定する方法およびシステム
マルチレベル分解を利用することで画質の計測値を決定する方法およびシステムを提供する。画像のマルチレベル分解はウェーブレット領域で実行され、各分解レベルのサブバンドを生成する。サブバンドの集計を複数レベルにまたがり行うことで、画質の正確な計測値を生成する。選択されたサブバンドのみを集計するようにすることで、方法の計算の複雑性が大幅に低減する。 (もっと読む)
通路検出方法、装置、及びプログラム
【課題】轍の検出精度を高めることによって、従来よりも精確に通路を検出することができる通路検出方法、装置、及びプログラムを提供する。
【解決手段】通路検出装置1は、入力画像に対する画像処理を行って入力画像に含まれる通路領域を検出するものであり、入力画像に含まれる通路領域のおおよその位置を示す中心ブロックを抽出する中心ブロック抽出部と、入力画像に対して複数種類のフィルタ処理を行って入力画像の評価に用いる特徴量をフィルタ処理の種類毎に求める特徴量算出部32と、中心ブロック抽出部31で抽出された中心ブロックにおける特徴量と同様の特徴量を有する領域を入力画像から抽出することによって通路領域を検出する通路領域検出部34とを備える。
(もっと読む)
重み付け方法、装置、及びプログラム、並びに、特徴画像抽出方法、装置、及びプログラム
【課題】特徴画像の抽出を短時間且つ高精度で実現し得る重み付け方法、装置、及びプログラム等を提供する。
【解決手段】特徴画像抽出装置1に設けられる画像処理装置30の重み付け部33は、複数のブロックに区分される画像を評価するために用いられる複数種類の特徴量に対する重み付けを行うものであって、複数のブロックのうちの予め指定された少なくとも2つの基準ブロックについて特徴量の平均値及び標準偏差を算出する第1算出部33aと、複数のブロックの全てについて特徴量の平均値を算出する第2算出部33bと、基準ブロックについての平均値と複数のブロックの全てについての平均値との差の値、及び前記基準ブロックについての標準偏差の値に応じて前記特徴量毎の重みを決定する重み決定部33cとを備える。
(もっと読む)
動作特徴抽出装置および動作特徴抽出方法
【課題】正常動作との対比による対応動作の評価を、より簡単に行うことができる動作特徴抽出装置および動作特徴抽出方法を提供すること。
【解決手段】動作特徴抽出装置300は、評価対象動画像から対応動作の特徴を抽出する装置であって、正常動作を撮影した学習用動画像を表示して着目領域の設定を受け付ける領域設定部330と、CHLAC特徴抽出法によって、学習用動画像のデータから、学習用動画像の全体の学習用全体特徴量と、着目領域の領域内特徴量とを抽出し、学習用全体特徴量と領域内特徴量とを関連付けた学習データを生成し、CHLAC特徴抽出法によって、評価用動画像のデータから、評価対象動画像の全体の特徴量である評価対象全体特徴量を抽出する、全体特徴抽出部320および関連学習部340と、評価対象全体特徴量から、学習データを用いて対応動作の特徴を抽出する特徴再計算部350とを有する。
(もっと読む)
被写体追跡装置及びその制御方法
【課題】 基準画像と入力画像との相関度に基づく被写体追跡を行う被写体追跡装置において、追跡対象の被写体と類似した対象が存在する場合や、追跡対象の被写体の動きが速い場合でも、安定した被写体追跡を可能とする。
【解決手段】
入力画像に設定された参照領域の画像と基準画像との相関度と、参照画像と直近に判定された被写体領域との距離との関数により、参照領域ごとに評価値を求める。また、入力画像が基準画像の特徴量と一致している度合いを求める。入力画像が基準画像の特徴量と一致している度合いが高い場合には、相関度の信頼性が低いので、評価値に距離が寄与する度合いを高める。一方、入力画像が基準画像の特徴量と一致している度合いが低い場合には、相関度の信頼性が高いので、評価値に距離が寄与する度合いを低くする。
(もっと読む)
重要度生成装置及び判別装置
【課題】入力画像に対する認識の精度を向上させることを目的とする。
【解決手段】
重要度生成装置が、被写体の変動を含む学習画像ペアの各々に複数の対応する領域を設定し、設定した対応する領域同士の類似度を算出し、算出した領域同士の類似度と学習画像ペア同士の照合結果とに基づいて重要度を領域ごとに算出し、判別装置が、重要度と入力画像と複数の辞書画像の各々との領域の類似度とに基づいて統合類似度を算出し、算出した統合類似度に基づいて、複数の辞書画像のうちに、入力画像に類似した辞書画像があるか否かを判別する。
(もっと読む)
自動セグメンテーション及び時間的追跡方法
【課題】自動セグメンテーション及び時間的追跡方法を提供する。
【解決手段】一実施形態では、脈管の中心線を検出する方法を提供し、該方法は、3D画像ボリュームを取得する段階と、中心線を初期設定する段階と、カルマン・フィルタを初期設定する段階と、カルマン・フィルタを用いて次の中心点を予測する段階と、前記カルマン・フィルタを用いて前記予測の妥当性を検査する段階と、テンプレート・マッチングを遂行する段階と、前記テンプレート・マッチングに基づいてカルマン・フィルタを更新する段階と、前記の予測し、検査し、遂行し、更新する各段階を所定の回数だけ繰り返す段階とを有する。本発明では更に、前記の中心線を検出する方法に関連して、自動脈管セグメンテーション方法及びセグメント化された脈管の時間的追跡方法を提供する。
(もっと読む)
データ生成方法および画像検査方法
【課題】ビットマップ画像における図形の輪郭線に関するデータを高速かつ正確に生成するデータ生成方法および、このデータ生成方法を用いた画像検査方法を実現する。
【解決手段】図形の輪郭線に関するデータを生成する処理を演算処理装置により実行するデータ生成方法は、設計上の図形の中心線をビットマップ画像に重ね合わせるステップと、中心線が重ね合わされたビットマップ画像上において、中心線上に位置する各探索基準点について所定の探査方向に向かって中心線上に位置するビットの色とは異なる色のビットを探索し、検出したビットを輪郭候補点とするステップと、各探索基準点に対して、輪郭候補点の中から当該探索基準点からの距離が最短となるもの抽出してこれを所望の図形の輪郭を構成する輪郭点とするステップと、対応する探索基準点の配列順に輪郭点間を結線したラインを輪郭線として確定して輪郭線に関するデータを出力するステップと、を備える。
(もっと読む)
81 - 100 / 357
[ Back to top ]