
Fターム[5L096EA39]の内容
Fターム[5L096EA39]に分類される特許
341 - 357 / 357
画像品質定量評価方法及びその装置

【課題】 異なるパターンにおけるスジ・ムラの見た目の悪さを統一的に定量化し、スジ・ムラ判定精度を向上させる。
【解決手段】 記録媒体に記録された一定濃度パターンを2次元画像データとして読み取る画像入力ステップと、2次元画像データを反対色空間の刺激値データに変換する画像データ変換ステップと、2次元の前記刺激値データの各空間位置における値を特定方向に沿って加算して1次元刺激値データプロファイルをそれぞれ求める投影ステップと、各1次元刺激値データプロファイルの位置における各刺激値に対する、刺激値データプロファイル全体の平均値からの距離を表す差分値を求める差分値算出ステップと、1次元刺激値データプロファイルの全位置に対する差分値に基づく値の総和を画像品質評価値として求める評価値算出ステップとを有する。
(もっと読む)
パターンマッチングアーキテクチャ

【課題】 本発明の課題は、上記問題点に鑑み、基準テンプレートまたはパターンとデータとの迅速であり、複数のアルゴリズムを選択可能な低消費電力を実現するパターンマッチングアーキテクチャを提供することである。
【解決手段】
本発明による装置は、入力データをビット数がプログラム可能な入力ビットフィールドに分割し、1以上の基準テンプレートをビット数がプログラム可能な対応する基準ビットフィールドに分割する選択ユニットと、前記入力ビットフィールドと前記対応する基準ビットフィールドとの間の1以上の距離を決定し、前記基準ビットフィールドに係る1以上の距離を前記基準テンプレートに対応する1以上のネットの距離に合成する距離ユニットとから構成される。
(もっと読む)
画像処理装置
【課題】 周囲環境の変化にも対応でき、道路上の撮影画像から安定して車両抽出を行うことが可能な画像処理装置を提供する。
【解決手段】 画像処理部は、車両の撮影画像として画像入力部21より入力された現在画像、ΔT前画像、2ΔT前画像とともに、微分画像作成部31で作成されたこれらの微分画像、背景画像作成部32で作成された背景画像を用いて、画像間減算部33及び画像間論理積演算部34により、微分背景差分、背景差分、フレーム差分、微分フレーム差分の4つの方式による特徴抽出処理を行う。そして、各方式で得られた画像を画像二値化部35で二値化した後、各方式で得られた画像に対して二値化画像重み付け部36で撮影環境に応じた重み付けを行い、画像間加算部37で加算して合成することで、特徴抽出画像を生成し、特徴画像格納部30に格納する。
(もっと読む)
パターン認識方法、それに用いられる教示データ生成方法およびパターン認識装置
【課題】欠陥データを生成して不足分を補い認識率を高めるパターン認識方法と、それに用いる教示データの生成方法を提供する。
【解決手段】教示ファイルに格納されている多数の教示データに基づいて学習し、パターン認識して欠陥判定をする外観検査装置であって、一のデータを変形して新たな教示データを生成する教示データ生成装置40を備えており、教示ファイル35中の多数の教示データのうち、データ数の少ない特定の教示データについては、その特定の教示データを変形して新たな教示データを生成し、その生成された教示データを前記教示ファイルに補充して欠陥認識させる。生成すべき教示データが画像データであるときは、画像の拡大、縮小、回転を含むアフィン変換と、明るさ、コントラスト、エッジ強度を含む属性変換を行うことにより、新たな教示データを生成する。
(もっと読む)
未知の多次元データ内のパターンを発見するためのコンピュータ化された方法
【課題】本方法は、未知の多次元データ内のパターンを発見するものである。
【解決手段】多次元データの時系列が生成され、時系列の自己相関をとることにより、点横断距離マトリクスが構成される。複数の時間分解能において、点横断距離マトリクス内の全ての最小コスト経路が見つけられる。そして、未知の多次元データ内の高レベルのパターンを発見するために、最小コスト経路が、多次元データ内の時間的な部分列に関連付けられる。  (もっと読む)
(もっと読む)
ソフトウェアアプリケーションと対話するためのジェスチャの認識および使用
【課題】 イメージを表示するための表示面を有し、ユーザの手および指を含めて様々なオブジェクトを検出することができる、インタラクティブディスプレイテーブルを提供する。
【解決手段】 ビデオカメラは、オブジェクトから反射された赤外線(IR)に応答して、任意の連結コンポーネントを検出する。連結コンポーネントは、表示面に接触しているかまたはその近傍にあるオブジェクトの部分に対応する。連結コンポーネントを使用して、インタラクティブディスプレイテーブルは、自然な手または指の位置、あるいはオブジェクトの動きを検知し推測して、ジェスチャを検出する。特定のジェスチャは、アプリケーションの実行、バーチャルオブジェクトの作成、または他の対話のために使用される。ジェスチャは、片手または両手、あるいは他のオブジェクトによって作られる、静的なポーズ、またはより複雑な形状、動きとすることができる。
(もっと読む)
画像の領域分割
【課題】 画像を複数の代表色に対応する画像領域に分割する領域分割において、領域分割結果の信頼性を向上させる。
【解決手段】複数の代表色を設定し、各代表色に対応付けられた重みを設定する。画像の画素の色と代表色との色の差を表し、代表色ごとに重み付けられた加重色差指標値を算出する。そして、加重色差指標値に応じて、画素の色を代表色に対応付けられた代表色領域に分類することにより、画像を複数の画像領域に分割する。
(もっと読む)
フォールバックを用いる画像処理装置
入力画像のシーケンスに基づいて出力画像のシーケンスを計算する画像処理ユニット(100,200,300)は、前記入力画像に基づいて動きベクトル場を計算する動き推定ユニット(102)と、前記動きベクトル場に対する品質測定の値を計算する品質測定ユニット(104)と、前記動きベクトル場に基づく前記入力画像の画素値の補間によって前記出力画像を計算する補間ユニット(106)と、前記品質測定に基づいて補間ユニット(106)を制御する制御手段(108)とを有する。品質測定ユニット(104)は、隣接した動きベクトルの間の最大の差に基づいて前記品質測定の値を計算するように構成される。前記品質測定の値が所定の閾値より低い場合に、動き補償補間が実行され、そうでなければ非動き補償補間が実行される。  (もっと読む)
(もっと読む)
物体検出装置
【課題】 静止画像から物体を検出するときに、画像上で重複している検出対象物体を分離し、検出対象物体それぞれを認識することができる物体検出装置を提供する。
【解決手段】 物体検出装置1は、画像を撮像するカメラ10,11と、カメラ10,11により撮像された画像から歩行者の候補画像が含まれる探索領域を抽出し、探索領域の座標値、及び、探索領域に含まれる歩行者候補と歩行者との類似度に応じた探索領域の評価値を出力する検出部30と、検出部30から出力された探索領域の座標値に基づいて、探索領域を歩行者ごとに分別する分別処理部42と、分別処理部42により分けられた歩行者ごとの探索領域の座標値に対して評価値に応じた重み付き平均をとることにより、歩行者の位置を算出する代表値作成部43とを備える。
(もっと読む)
画像内の物体を認識するための方法および装置
画像内の物体のアスペクト視野角に関わらず、生成画像内の物体を検出および認識するための方法および装置を開示する。物体は、検出された物体の、決定された記述子の値を、記述子の値および/または複数の物体の異なるアスペクト視野角の情報ベースに格納された値の範囲と比較することによって、認識することが可能である。斬新なデサーフェーシング手法は、画像内の物体に関係のない画像面の歪を取り除くために使用することが可能である。斬新なグラフィカルユーザーインターフェースは、ユーザーインタラクションおよび物体認識処理の制御を向上させるために使用することが可能である。開示される方法および装置は、広範囲の撮像システムによって生成される画像内の物体の検出に使用することが可能である。  (もっと読む)
(もっと読む)
監視装置
監視装置は、カメラ(101)で撮影された全体画像をフレーム毎に受けて全体画像に対してフレーム間差分処理、又は事前に用意された背景画像との背景差分処理を行う移動体画像生成部(102)と、差分処理された画像(移動体画像)を1次元情報に変換し、周波数分析を行って、移動物体または群衆の密集の度合いを示す密集度を算出する密集度算出部(103)と、所定日時の密集度に基づいて移動物体又は群衆の基準密集度(モデル値)を算出するモデル生成部(104)と、現時刻における密集度と基準密集度との比較を行って、現時刻における密集度が基準密集度と異なるか否かを判断して判断結果を生成して報知部(107)に与える状況判断部(106)とを備える。  (もっと読む)
(もっと読む)
重み情報を用いた物体姿勢推定・照合システム
姿勢や照明の異なる条件で撮影された様々な物体の画像に対して、適切な重み係数設定により高精度な姿勢推定および照合を行う物体姿勢推定・照合システムが開示される。姿勢候補決定部は、姿勢候補を決定する。比較画像生成部は、参照3次元物体モデルを基に、入力画像に近い比較画像を姿勢候補に応じて生成する。重み係数変換部は、標準3次元基準点と参照3次元基準点を用い、標準3次元重み係数と参照3次元物体モデルとの座標の対応を求め、姿勢候補に応じて標準3次元重み係数を2次元重み係数に変換する。加重照合・姿勢選択部は、2次元重み係数を用い、入力画像と比較画像との重み付き距離または類似度を計算し、当該物体に対して最も距離値の小さい比較画像(姿勢候補)を選択することにより、物体の姿勢推定および照合を行う。 (もっと読む)
動きベクトルフィールド再タイミング
特定の空間的位置を有し、ビデオ画像の系列の第1画像及び第2画像の間における時間的位置(
)において位置される、特定の画素に関する特定の動きベクトル(
)を、前記第1画像に関して推定される第1動きベクトルフィールド(
)に基づくとともに、前記第2画像に関して推定される第2動きベクトルフィールド(
)に基づき推定する方法が開示される。当該方法は、前記特定の画素の前記特定の空間的位置に基づき、前記第1動きベクトルフィールド(
)及び第2動きベクトルフィールド(
)から複数の動きベクトルを選択することによって一群の動きベクトル(
、
、
)を生成するステップと、前記一群のベクトル(
、
、
)に順序統計的演算を実行することによって前記特定の動きベクトル(
)を確定するステップと含む。  (もっと読む)
(もっと読む)
画像などの既存の位相情報を有するデータ配列を処理するためのニューラルネットワーク及び該ネットワーク使用方法
相対的な位相情報を有するデータ配列を処理するためのニューラルネットワークであって、人工ニューラルネットワークのノットに対応するセル(Ki)のn次元配列を備え、前記セルのそれぞれが、前記セル(Ki)に直接隣接するとともに該セル(Ki)の近傍を形成する周囲のセル(Kj)に対する結合を備え、前記セル(Ki)のそれぞれが、前記周囲のセルに直接隣接する1つのセルへの各結合のためのインプットを備えるとともに、1つ若しくはそれ以上の前記直接隣接するセル(Kj)への結合のためのアウトプットを備え、前記セル(Ki)と前記直接隣接するセルの間の前記結合が重み(wij)により決定され、前記セルのそれぞれが、前記セル(Ki)の活性値或いは活性化関数(Ai)として定義される内部値により特徴付けられ、前記セル(Ki)のそれぞれが、信号処理を実行することによりセルのアウトプット信号(ui)を作り出し、セル(Ki)の前記出力信号(ui)が前記直接隣接するセルの入力値の関数であり、セルのそれぞれが、対応するセルの開始値であり、前記ニューラルネットワークの特定数の相互作用的処理段階の後に、セル(Ki)の内部値或いは出力値(ui)を、一意的に関連付けられたデータ・レコード(Pi)のための新たに得られた値(Ui)としてみなすことにより、処理が行われることを特徴とするニューラルネットワークである。 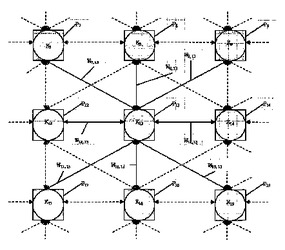 (もっと読む)
(もっと読む)
車両制御装置、プログラム及び方法
【課題】運転者のブレーキタイミングの特性や車両を取り巻く状況に柔軟に対応することができる車両制御を提供する。
【解決手段】車両制御装置は、自車両の外部の画像を撮影する撮影手段と、他車両の接近を検出するためのテンプレートを記憶するテンプレート記憶手段を有する。テンプレートは、運転者のブレーキ操作に基づいて適宜更新される。車両制御装置は、撮影した画像とテンプレートとを比較して、前方を走行する車両が相当接近してきたために、自車両の減速や停止が必要であるか否かの判断を行う認識処理手段をさらに有している。認識処理手段によって減速や停止が必要と判断され、かつ、運転者によってアクセルペダルを戻したりブレーキペダルを踏むなどの衝突回避の操作が行われなかった場合は、動作指示手段によって自車両に衝突回避操作を実行させる。
(もっと読む)
輝度情報取得方法、画質評価方法、表示装置の輝度情報取得装置および表示装置の画質評価装置
【課題】 輝度勾配およびその中で生ずる局所的な輝度ムラを抽出し、かつ定量的に評価することのできる手法を提供する。
【解決手段】 所定の注目画素10を取り囲む第1の画素群11aを構成する各画素の輝度値の総和と注目画素10の輝度値の差分を算出する処理を全ての画素を注目画素10として順次実行することにより第1の輝度情報を得る第1の輝度情報算出ステップと、第2の画素群12aを構成する各画素の輝度値の総和と注目画素10の輝度値の差分を算出する処理を全ての画素を注目画素10として順次実行することにより第2の輝度情報を得る第2の輝度情報算出ステップと、前記第1の輝度情報と前記第2の輝度情報とを加算することにより第3の輝度情報を得る加算ステップと、前記加算ステップにより得られた第3の輝度情報に基づいて撮像された画面の輝度を評価する評価ステップと、を備える画質評価方法。
(もっと読む)
画像抽出方法及び装置並びに記憶媒体
【課題】 様々な画像で被写体を精度良く高速に抽出する。
【解決手段】 基準点近傍で濃淡値の分散値が閾値以上なら画像パターンがテクスチャ優位な特徴を有するものとし、閾値未満なら濃淡値の変化が緩やかであると判定する(S11)。分散値が閾値以上の場合(S11)、テクスチャ特徴量をロードし(S12)、領域成長に適した特徴量(例えば、テクスチャエネルギ)を算出し(S13)、テクスチャ特徴量に関する距離DTを求める(S14)。分散値が閾値未満の場合(S11)、色成分特徴量をロードし(S16)、領域成長に適した特徴量(例えば、色成分に関する局所ヒストグラムから求まる特徴ベクトル又は代表色成分のリストなど)を抽出し(S17)、色成分に関する距離DCを求める(S18)。対応する特徴量に基づき領域を成長し(S15,S19)、各基準点からの領域成長結果を統合して得られる核領域の新たな境界線に基づく更新位置の決定する(S20)。
(もっと読む)
341 - 357 / 357
[ Back to top ]