
Fターム[5L096EA39]の内容
Fターム[5L096EA39]に分類される特許
101 - 120 / 357
画像処理装置、画像処理方法、プログラム及び記録媒体
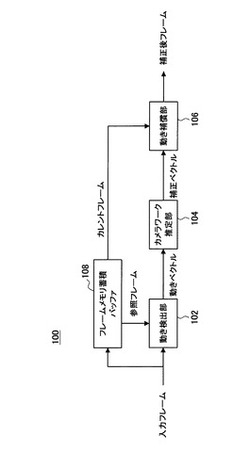
【課題】手振れ補正時におけるフォーカルプレーン歪みをユーザーに対して認識させにくくすることが可能な画像処理装置、画像処理方法、プログラム及び記録媒体を提供する。
【解決手段】CMOS撮像素子によって撮影された複数のフレーム画像に基づいて画像の動き量を検出する動き検出部と、動き量に基づいて撮影時の撮像装置の移動速度を推定する動作推定部と、移動速度が大きいほどユーザーが意図する撮像装置の移動動作を残存させるように画像の動き量を補正する補正値を算出する補正値算出部と、補正値を使用して、ユーザーが意図する撮像装置の移動動作のみを画像に残す補正をする動き補償部とを備える。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム

【課題】異なる傾向の特徴を有する特定の被写体を画像内から精度よく検出するためのデータを生成することを課題とする。
【解決手段】画像処理装置1は、辞書データ記憶部2、演算部3および算出部4を有する。辞書データ記憶部2は、被写体が有する特徴に関する辞書データを記憶する。演算部3は、被写体のうち特定の被写体を含む入力画像の情報に基づいて、該入力画像の特徴データを演算する。算出部4は、特徴データおよび辞書データに基づいて、特定の被写体に関して当該辞書データに補完される補完値を算出する。
(もっと読む)
動きベクトル検出装置、フレーム補間処理装置およびそれらの方法
【課題】 精度の高いGMVパラメータを取得する。
【解決手段】 展開後動きベクトル手段11は、GMVパラメータが与えられると、各ブロックについてのLMVに展開した展開後LMVを演算する。計算対象ブロック決定手段17は、各ブロックについて、前記展開後LMVと、ブロック別動きベクトル演算手段3が演算したLMVとの差が閾値記憶手段15に記憶された閾値内であるブロックを計算対象ブロックとして決定し、決定した計算対象ブロックについてのブロック別動きベクトル演算手段3が演算したLMVを平行移動パラメータ演算手段6に計算対象ブロックとして与える。繰り返し手段11は、計算対象ブロック決定手段17の処理を所定回数、繰り返す。その際繰り返し回数が増える度に閾値記憶手段15の閾値を小さくして、繰り返し処理を行う。
(もっと読む)
階層マスク生成装置、フレーム補間処理装置
【課題】 高精度で高い演算速度の探索を行う。
【解決手段】 ブロック設定手段511は、代表ブロック座標について、大きさの異なるブロックを設定する。探索範囲候補特定手段521は、前記異なる大きさのブロック毎に第n+αフレームの探索範囲を探索範囲候補として特定する。相対割合演算手段523は、前記代表ブロック座標で特定される第nフレームのブロック内における移動オブジェクトの占める相対割合を演算するとともに、対応する前記第n+αフレームについて、前記各探索範囲候補の探索範囲内における移動オブジェクトの占める相対割合を演算する。決定手段525は、前記相対割合が大きなブロックに対応する探索範囲候補を、前記代表ブロック座標で特定されるブロック探索範囲として決定する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】他の領域と特徴の似ている画像領域であっても、当該画像領域における正しいオブジェクトの識別を行えるようにする。
【解決手段】特徴量算出部113では、画像分割部112で分割された画像の各領域から特徴量を算出し、対応付け手段(114及び115)では、当該特徴量に基づいて各領域に1又は複数のオブジェクトを対応付ける。そして、オブジェクト選択部116では、対応付け手段により1つの領域に対して複数のオブジェクトが対応付けられた場合、当該1つの領域に対応付けられた各オブジェクトへの帰属確率と、当該1つの領域の近傍に位置する近傍領域に係る近傍領域情報とに基づいて、複数のオブジェクトの中から1つのオブジェクトを選択して当該1つの領域に対応付ける。そして、領域統合部117では、画像において同じ種類のオブジェクトが対応付けられた領域を統合する。
(もっと読む)
画像処理装置
【課題】FOE座標の位置を高精度に求めること。
【解決手段】FOE座標Fから特徴点座標Piへ向かう線分と、当該特徴点PiのオプティカルフローViとがなす角度θiを誤差として、各特徴点Piの誤差の総和を評価する評価関数Eを算出する。その際に、FOE座標Fから特徴点座標Piへ向かう線分と特徴点PiのオプティカルフローViとがなす角度θiが大きくなるほど、評価関数Eに対する当該特徴点Piの誤差の影響度合を低減する重み係数Wiを用いて、各特徴点Piの誤差から評価関数Eを算出し、このようにして算出された評価関数Eを用いて、誤差の総和が小さくなるようにFOE座標Fを定める。
(もっと読む)
地理情報生成システム及び地理情報生成方法
【課題】建物形状を正確に抽出することができる地理情報生成システムを提供する。
【解決手段】空中写真から建物の形状を抽出する地理情報生成システムであって、プログラムを実行するプロセッサと、前記プログラムの実行に必要なデータを記憶するメモリと、前記空中写真を格納する記憶部と、を備え、前記プロセッサは、前記記憶部に格納された空中写真中の隣接する画素の特徴量に基づいて、画像のエッジを検出し、前記検出されたエッジの方向を解析することによって、建物の方向を抽出し、前記抽出された建物の方向の直線を用いて、該建物の外形のポリゴンを生成することを特徴とする。
(もっと読む)
動き領域の非線形スムージングを用いた動き検出方法およびシステム
【課題】複雑ではない、動きベクトルフィールドの非線形拡散フィルタイリング方法およびシステムを提供する。
【解決手段】非線形拡散フィルタにおける局所的重みは、データ適合であり、本発明の一実施形態によると、対称境界は明示的に検出されないが、空間コヒーレンスが対象境界において実行されるように算出される。したがって、本発明に係る方法およびシステムは、対象境界を越えて動きベクトルフィールドをスムージングせずに動きベクトルフィールドをスムージングする。本発明に係る第二形態によると、低信頼値の動きベクトルが減少し、高信頼値の動きベクトルが増加する。本発明に係る他の形態によると、動き検出方法およびシステムは、本発明に係る非線形拡散フィルタリングの方法およびシステムを内蔵する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】撮像環境を考慮して注目度の高い特定領域を適正に検出する。
【解決手段】撮像装置100であって、処理対象画像の複数の特徴の各々について特徴マップを生成する特徴マップ生成部5cと、処理対象画像の撮像環境を特定する撮像環境特定部5bと、特定された処理対象画像の撮像環境に応じて、複数の特徴マップの重み付けを行う重み付け部5dと、この重み付け部により重み付けされた複数の特徴マップの特徴分布に基づいて、処理対象画像から特定領域を検出する特定領域検出部5fとを備えている。
(もっと読む)
画像特徴点抽出方法
【課題】各種オペレータを用いて得ることができる特徴点から、不要に抽出された点を排除し、マッチング処理の対応付け等に用いる特徴点を、対象物の変動に追随して同じように変動していく、マッチング用モデルとの形状誤差が少なく、対応付けの容易な不変性の高い点に絞込んで、マッチング処理を精度よく、且つ高速に行う。
【解決手段】画像データから特徴点を抽出するための画像特徴点抽出方法において、画像を変動させて複数枚の画像データを取得し、各画像データごとに特徴点を抽出し、抽出した特徴点の変動前の画像データにおける位置を求め、画像変動に追随して抽出される特徴点のみを選択し、他の点を排除する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】変化の少ない画像から観察者が注目すると推測される画像領域を適切に検出する。
【解決手段】撮像装置100であって、取得した処理対象画像の複数の画素を、各画素の所定の色空間における変数の値に基づいて複数のグループにグループ分けするグループ分け部5cと、グループ分けされた複数のグループの各々について、各グループに属する画素の当該画像における分散値を算出する分散値算出部5dと、算出された分散値に基づいて、各グループの評価値を算出する評価値算出部5gと、各グループの評価値の算出結果に基づいて、複数のグループのうちの何れか一のグループに属する画素によって構成される領域を注目領域として検出する注目領域検出部5hとを備えている。
(もっと読む)
被写体追尾プログラム、およびカメラ
【課題】フレーム内の被写体位置を特定して被写体追尾を行うこと。
【解決手段】制御装置104は、フレーム内に各粒子の散布位置に基づいて設定した探索枠内を対象としてテンプレートマッチング処理を行うことによってフレーム内における被写体位置を推定し、推定した被写体位置に仮の被写体枠を表示する。そして、制御装置104は、推定した被写体位置に基づいて設定した探索枠内を対象としてテンプレートマッチング処理を行うことによってフレーム内における被写体位置を特定し、特定した被写体位置に被写体枠を表示する。
(もっと読む)
画像解析装置、画像解析方法およびプログラム
【課題】オブジェクトの検出処理と特定オブジェクトの追跡処理とを効率的にすることができる画像解析装置を提供すること。
【解決手段】画像解析装置は、種類が異なる複数の基準特徴量を記憶する特徴量記憶部と、動画に含まれる複数の動画構成画像のそれぞれから、種類が異なる複数の特徴量を抽出する特徴量抽出部と、特徴量記憶部が記憶している複数の基準特徴量に対する抽出された複数の特徴量の適合度に基づき、動画構成画像からオブジェクトを抽出するオブジェクト抽出部と、特徴量記憶部が記憶している基準特徴量より、抽出されたオブジェクトの特徴量に種類に応じて予め定められた強度で適応させた複数の基準特徴量を算出する基準特徴量算出部と、特徴量記憶部が記憶している複数の基準特徴量を、基準特徴量算出部が算出した基準特徴量で更新する特徴量更新部とを備える。
(もっと読む)
映像再構成方法、映像再構成装置および映像再構成プログラム
【課題】本発明は、処理対象の映像に対して、印象的インパクトを最大化する再構成映像を自動生成する新たな映像再構成技術の提供を目的とする。
【解決手段】処理対象の映像の持つ画像情報や音情報からフレーム毎に特徴量を抽出し、それに基づいて処理対象の映像をセグメントに分割する。続いて、抽出した特徴量をベクトル量子化して有限個の符号に変換したのち、セグメント毎に、変換した符号の数をカウントしヒストグラムを生成することで、各セグメントに対してヒストグラムを付与する。続いて、セグメント毎に、それに付与したヒストグラムに基づいてpLSAなどの手法を適用することで、背後にある複数の特徴量グループへの帰属度合いを示す確率値ベクトルを算出し、それに基づいて視聴者に与える印象的インパクトの推定値を求めて、大きな印象的インパクトを持つセグメントを優先して選択することで再構成映像を決定する。
(もっと読む)
ソーシャルネットワークの支援による顔認識
顔認識検索システムが、クエリ内の1つまたは複数の顔画像に対応する、1つまたは複数の適当な名前(または他の個人識別子)を以下のように特定する。1つまたは複数の顔画像を有する視覚クエリを受け取った後、このシステムは、視覚的類似性基準に応じてそれぞれの顔画像に潜在的に一致する画像を特定する。次いで、それらの潜在的な画像に関連する1人または複数の人物を特定する。特定した人物ごとに、通信アプリケーション、ソーシャルネットワーキングアプリケーション、カレンダアプリケーション、共同アプリケーションなど、複数のアプリケーションから、要求者に対する社会的なつながりについてのメトリクスを含む人物固有データを取得する。次いで、少なくともそれぞれの顔画像と潜在的な画像の一致との間の視覚的類似性のメトリクスに応じて、および社会的つながりメトリクスに応じて特定した人物をランク付けすることにより、順序付き人物一覧を生成する。最後に、その一覧からの少なくとも1つの人物識別子を要求者に送る。  (もっと読む)
(もっと読む)
消失点推定装置およびプログラム
【課題】撮像画像から単一の直線しか検出されない場合であっても、計算量を増大させることなく、安定して消失点の位置を推定可能な消失点推定装置を提供する。
【解決手段】直進判定部48にて自車両が直進していると判定されると、直線検出部42は、画像処理部41の特徴点抽出処理によって撮像画像から抽出された特徴点から画像中の直線を検出し、その直線を表すパラメータ(直線情報)を算出する。交点算出部44は、現在の推定サイクルで直線検出部42にて算出された直線情報から特定される今回直線同士の交点の位置、及び、直線情報記憶部43に記憶されている前回の推定サイクルで算出された直線情報から特定される過去直線と今回直線との交点の位置を算出する。計数部45は、交点算出部44にて算出された交点の位置の出現頻度を、X軸方向,Y軸方向のそれぞれについて計数し、計数結果である頻度分布から画像中の消失点の位置を推定する。
(もっと読む)
遺伝的処理装置、遺伝的処理方法、および遺伝的処理プログラム
【課題】遺伝的処理において、より安定した進化的計算によって変換器を生成する。
【解決手段】入力データを出力データに変換する少なくとも1つの前世代の変換器から、遺伝的処理により現世代の変換器を生成する生成部と、前世代以前の重みデータを、現世代の重みデータに更新する重み生成部と、それぞれの現世代の変換器について、学習用入力データを変換した変換済データと学習用目標データとを現世代の重みデータにより重み付けして比較した結果に応じた現世代適合度、および、変換済データと学習用目標データとを前世代以前の重みデータにより重み付けして比較した結果に応じた旧世代適合度を算出する適合度算出部と、を備える遺伝的処理装置を提供する。
(もっと読む)
ロボットの対象物認識方法
【課題】領域内に存在する対象物をセンサからの検知情報に基づいて、コンピュータに大きな負担を掛けることなく人間などの対象物を頑健に認識することができる。
【解決手段】ロボット10の周囲に存在する人間は、超音波センサ22,全方位カメラ30,眼カメラ52R,52L,焦電センサ82などの複数のセンサによって検知される。各センサから出力されたセンサデータは、センサ入力/出力ボードを介してメモリに取り込まれる。CPUは、取り込まれたセンサデータのうち複数のサンプリング領域に対応する一部のセンサデータに基づいて、人間の存在確信度の正規分布を仮定する。CPUはまた、仮定された正規分布に基づいて人間の存在位置を認識し、存在確信度が増大するほど領域サイズが拡大するように複数のサンプリング領域を規定する。
(もっと読む)
物体検出方法、物体検出装置
【課題】直線成分に囲まれた計測物であっても、ノイズの影響を受けにくい物体検出方法、物体検出装置を提供することを目的としている。
【解決手段】物体検出装置は、ステージ10、カメラ11、物体検出制御・処理ユニット12、画像表示装置13、制御部101、画像データ取り込み部102、特徴点抽出部103、二値化部104、基準点算出部105、ベクトル検出部106、濃度勾配検出部107、モデルデータ登録部108、Rテーブル記憶部109、重み付け係数生成部110、Rテーブル読み出し部111、平行移動ベクトル演算部112、投票部113、投票結果記憶部114、基準点座標・回転角度検出部115、画像出力部116から構成されている。
(もっと読む)
被写体追尾装置、およびカメラ
【課題】テンプレートマッチング処理に用いるテンプレート画像を更新すること。
【解決手段】制御装置104は、初期テンプレート画像、および更新テンプレート画像と、入力画像内に設定したターゲット画像との類似度値をそれぞれ算出し、算出した類似度値に基づいて、入力画像内における被写体位置を特定する。そして、制御装置104は、類似度値が更新テンプレート画像の更新条件を満たすか否かを判定し、満たすと判定した場合には、重み係数を乗じた初期テンプレート画像の画素情報と、重み係数を乗じたターゲット画像の画素情報とを加算することによって、新たな更新テンプレート画像を生成し、SDRAMに記録されている更新テンプレート画像を新たに生成した更新テンプレート画像で更新する。
(もっと読む)
101 - 120 / 357
[ Back to top ]