
Fターム[5L096FA34]の内容
Fターム[5L096FA34]に分類される特許
201 - 220 / 771
走行路推定装置及びプログラム
【課題】高さ情報を用いて道路と道路外領域の境界を高精度に検出し、路面マーカーが存在しない道路における走行路推定を可能にする。
【解決手段】ステレオ画像における一方の画像中の全点が道路平面上に存在すると仮定してもう一方の画像における見え方に変換した変換画像と実際に入力した画像との間の類似性を調べることで、道路面とは高さが異なる路肩候補点を検出し、得られた路肩境界候補点を道路面へ逆投影した逆投影路肩候補点画像中で路肩候補点を中心として探索原点と路肩候補点とを結ぶ直線上に設けられた2つの領域内における路肩候補点数の関係から真の路肩点を選択して走行路を推定する。
(もっと読む)
パターン認識装置及びパターン認識方法

【課題】所定の値より大きな固有値を持つ主成分ベクトルとそれらに対応する固有値を選択的に用いた直交化により各クラスのパターン分布を直交化することで、高精度に識別可能なパターン認識装置を提供する。
【解決手段】入力パターンを認識するパターン認識装置は、擬似直交化変換データ生成格納部303と擬似直交化変換部304と辞書部分空間生成部306と入力部分空間生成部305と類似度算出部308と識別部309とからなる。擬似直交化変換データ生成格納部は303は、複数の識別クラスにそれぞれ属する複数の学習パターンを主成分分析することにより得られる、複数の上位の主成分ベクトルとそれらに対応する固有値を用いて、各識別クラスのパターン分布同士を直交状態に近づける擬似直交化変換を行うためのデータセットを生成し格納する。このデータセットを用いて、辞書部分空間や入力部分空間を擬似直交化変換部304において直交化する。
(もっと読む)
画像処理装置、画像処理プログラム、画像処理方法、および電子機器
【課題】歪曲収差の影響により、画像間の位置合わせの精度が低下する
【解決手段】複数枚の画像間の位置ずれ量を用いて複数枚の画像の位置合わせ処理を行う画像処理装置であって、光学系の歪みを示す情報に基づいて、画像上に、動きベクトルを測定するための複数の動きベクトル測定領域403を設定し、設定した複数の動きベクトル測定領域の各々において、複数枚の画像間の動きベクトルを求め、求めた複数の動きベクトルに基づいて、複数枚の画像間の位置ずれ量を求める。
(もっと読む)
動きベクトル検出装置、動きベクトル検出方法及びプログラム
【課題】動きベクトルを評価した評価値情報を使用して候補ベクトルを求めて、動きベクトルを検出する場合の精度を向上させる。また、複数の動きベクトルを確実かつ簡単に検出できるようにする。
【解決手段】時間軸上における異なるフレーム間の画素値相関情報に基づいて評価値情報を生成し、評価値情報に基づいて動画像データのフレーム構成画素に対する動きベクトルを抽出し、抽出された候補となる動きベクトルの中から、動きベクトルを決定する。評価値情報に基づいて動きベクトルを抽出する処理は、一方のフレーム内の注目画素を中心とした所定領域内の画素と、他方のフレーム内の参照画素を中心とした所定領域内の画素とを領域全体で比較して、相関状態を比較する。その比較結果に基づいて、評価値情報の各候補ベクトルを評価して、評価値の高い動きベクトルを候補として抽出する処理である。
(もっと読む)
デパレタイズ用のワーク位置認識装置および方法
【課題】ワーク上面の輪郭データに基づく誤検出を大幅に低減することができ、ワークの形状、模様及び画像の鮮明度の影響を低減して認識精度を高め、常に高い精度とワークの位置と姿勢を検出することができるデパレタイズ用のワーク位置認識装置および方法を提供する。
【解決手段】撮影装置12により、複数の同一ワーク1が同一平面上に並んだ画像3を撮影し、画像処理装置14により、画像3から輪郭データ5を取得し、輪郭データ5から各ワークの位置及び姿勢を検出し、画像中のワーク部分の画像をマスタ画像パターン6として登録し、マスタ画像パターンと各ワーク部分の画像とのパターンマッチングを行い、すべてのワーク部分に対しパターンマッチングが成功した場合に、各ワークの位置及び姿勢を出力する。
(もっと読む)
画像データの分布モデル更新装置、画像処理装置、画像データの分布モデル更新方法およびプログラム
【課題】混合ガウス分布モデルを用いた動体または不動体の検知処理における検知精度を向上させる。
【解決手段】分布モデル判定選択部250は、n項の分布モデルに画像データが含まれるか否かを判定して、最も信頼度の高い分布モデルを選択する。n項の分布モデルのうち少なくとも1項の分布モデルに画像データが含まれると判定された場合には、分布モデル判定選択部250は、最も信頼度の高い分布モデルのインデックス情報を出力する。分布モデルは、R値平均、G値平均、B値平均、分散、直近信頼度および経験的信頼度を備える。最も信頼度が高いものとして選択された分布モデルについては、それら全てが分布モデル更新部260において更新される。一方、それ以外の分布モデルは、直近信頼度および経験的信頼度のみが更新される。
(もっと読む)
特徴抽出装置および特徴抽出方法
【課題】カラー画像データから色と形状の情報を同時に含む新規な特徴データを抽出することができる特徴抽出装置および特徴抽出方法を提供すること。
【解決手段】特徴抽出装置は、色空間における基準色ベクトルまでの距離に基づいてカラー画像データの各画素の色ベクトルを量子化する量子化手段、量子化された色ベクトルを用いて局所自己相関値を算出する局所自己相関値算出手段、局所自己相関値を足し合わせる積算手段とを備える。カラー画像データの色空間をRGB空間からHSV空間へ変換する色空間変換手段を備えてもよい。局所相関をとることにより色と形状の情報を同時に抽出可能であり、対象認識に必要な情報が効果的に抽出され、対象物の識別能力が高くなる。
(もっと読む)
目標物検出システム
【課題】 金属材質の目標物を対象とする場合において、少ない演算処理負荷により、的確に目標物の検出を行うことが可能な目標物検出システムを提供する。
【解決手段】 探索対象画像中において、金属材質を対象とする候補画素を選定した後、候補画素の1つを検出し(S501)、検出された候補画素より右方向に隣接した候補画素を順次探索する(S502)。右方向に候補画素がN個連続しない場合には(S503)、検出画素より下方向に隣接した候補画素を順次探索する(S504)。右方向、下方向のいずれかで候補画素がN個連続した場合には(S505)、連続するN個の候補画素の平均値、最大最小値を算出し(S506)、平均値が所定値以上で、最大値と最小値の差が所定値以下である場合には(S507)、連続するN個の候補画素を全て目標物非存在領域に修正し、修正した画素の隣接画素も順次目標物非存在領域に修正する(S508)。
(もっと読む)
目標物検出システム
【課題】 金属材質の目標物を対象とする場合において、探索すべき対象を漏らさず、かつ探索の処理負荷を軽減するため、探索範囲を的確に絞り込むことが可能な目標物検出システムを提供する。
【解決手段】 探索対象画像中から目標物を探索するにあたり、事前に目標物が存在する可能性が高い部分のみを探索対象領域として設定する。その際、4×4の画素ブロックに適用するための画素評価算出式、画素判定基準値、画素評価算出式により算出される画素評価値と画素判定基準値の関係による設定条件を定めるが、画素判定基準値については、利用者による探索対象の指定に従い(a)、指定された箇所が探索対象として設定されるような値を設定する。さらに、利用者による探索非対象の指定に従い(b)、指定された箇所が探索非対象として設定されるように既に算出された画素判定基準値を補正する。
(もっと読む)
静止領域検出方法とその装置、プログラム及び記録媒体
【課題】様々な外乱要因のある条件でもロバストに静止領域を検出する。
【解決手段】静止領域検出装置10の初期背景作成部2は画像入力装置から取得された画像を用いて加重平均画像を計算して前記背景画像を作成すると共に定常的な揺らぎを正規分布によってモデル化して前記閾値画像を作成する。前景箇所抽出部3は前記取得された画像と前記作成された背景画像との差分計算を前記閾値画像に基づき行い前景を算出する。次に前記取得された画像と前記作成された背景画像に基づく指標値を計算することで前記両者の画像を比較する差分計算により前景を算出する。そして、前記二つの前景の論理積を計算して前景領域を算出する。逐次背景更新部処理5は前記取得された画像と前記作成された背景モデルを用いて前景箇所抽出3で前景と判断されなかった領域と静止箇所評価部4で静止領域と判断された領域について背景モデルを新たに作成する。
(もっと読む)
対象領域抽出装置、対象領域抽出方法、対象領域抽出プログラム及びそのプログラムを記録した記録媒体
【課題】経時的変化のない背景の下で撮像した画像から対象物領域を抽出する。
【解決手段】撮影装置C1.C2にて手指を撮像した画像データが対象領域抽出装置に入力されている。撮影装置C1は、色合いを含まずかつ経時的に変化しない背景の下に手指を撮像している。対象領域抽出装置は、撮影装置の撮影画像から代表的個体肌色情報を取得する(S01)。また、対象領域抽出装置は、代表的個体肌色情報をもとに撮像装置C2の撮像画像を肌色領域および未定領域を含む画像に変換する(S02)。この変換画像中の未定領域に領域拡張処理を施した領域拡張画像を取得する(S03)。この領域拡張画像の肌色領域にラベリング処理を施して手指領域を抽出する(S04)。
(もっと読む)
被写体追跡プログラムおよび被写体追跡装置
【課題】検索領域の大きさによってはテンプレートマッチングにおける演算時間が急激に増大するのを防止する。
【解決手段】連続して撮像された複数の画像Iのそれぞれに、予め設定したテンプレート画像Aと類似する被写体を検索するための検索領域Sと、検索領域S内にテンプレート画像Aと比較するための比較対象領域Bとを設定し、検索領域S内で比較対象領域Bを移動させながら、比較対象領域Bの画像とテンプレート画像Aとを比較して類似度を演算し、画像内で類似度の最大値が演算された比較対象領域Bの位置を、追跡対象の被写体が存在する位置として特定する際に、比較対象領域Bの大きさに対する検索領域Sの大きさが所定の関係とならないように検索領域Sの大きさを設定する。
(もっと読む)
目標物検出システム
【課題】 探索範囲を的確に設定し、金属材質の目標物を対象とする場合における探索の処理負荷を軽減することが可能な目標物検出システムを提供する。
【解決手段】 4×4の画素ブロックを想定し、中央画素群の画素値Vi1〜Vi4と周辺画素群VO1〜VO12を利用した画素評価算出式、その画素評価算出式に応じた画素判定基準値、画素評価算出式により算出される画素評価値と画素判定基準値の関係による設定条件、が定義された画素評価ルールを用い(a)、探索対象画像から順に抽出した4×4の画素ブロックに対して(b、c)、画素評価ルールを適用し、抽出した画素ブロックに含まれる画素を探索対象とするか探索非対象とするかを設定する。このようにして、探索対象に設定された画素のみを探索することにより、目標物探索の処理負荷を軽減することができる。
(もっと読む)
画像処理プログラム、画像処理装置及び画像処理システム
【課題】検版作業の効率及び品質を向上することができる画像処理プログラム、画像処理装置及び画像処理システムを提供する。
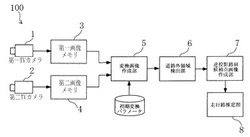
【解決手段】画像処理装置1は、オリジナル画像2及びターゲット画像3の2つの画像データを入力する画像入力部10と、それら2つの画像データから基準となるオリジナル文章と、比較の対象となるターゲット文章をそれぞれ取得する文章取得部11と、 オリジナル文章の異なる位置から複数の第1の文字列を選択し、それら複数の第1の文字列に対応する第2の文字列がターゲット文章に存在するか否かにより、ターゲット文章のうちオリジナル文章に対して差異のある文字を取得する差異取得部12と、差異取得部12により取得された差異のある文字を出力する出力手段としての差異出力部13等から構成されている。
(もっと読む)
パターン検出器の学習装置、学習方法及びプログラム
【課題】
高い検出性能のパターン検出器を現実的な学習時間で構築できるようにしたパターン検出器の学習装置、学習方法及びプログラムを提供する。
【解決手段】
複数の弱判別器から構成され、複数の弱判別器による判別により入力データから特定パターンを検出するパターン検出器の学習装置であって、特定パターンを含むか否かが既知であるデータから構成される複数の学習用データを取得し、当該取得した学習用データから特定パターンを検出させることにより複数の弱判別器を学習させ、当該学習が済んだ弱判別器の中から合成対象となる複数の弱判別器を選択するとともに、当該選択された複数の弱判別器を合成した場合の合成後の弱判別器の性能と複数の弱判別器の性能との比較に基づき複数の弱判別器を1つに合成する。
(もっと読む)
移動ベクトル検出装置
【課題】3次元方向(奥行き方向)の動きベクトルを検出することが可能な移動ベクトル検出装置を提供する。
【解決手段】距離画像を用いて移動ベクトルを検出する移動ベクトル検出装置において、撮像素子を用いて、所定タイミングごとに、画素値が測距対象物までの距離値である距離画像を生成する距離画像生成手段と、前記距離画像生成手段により異なるタイミングで生成された二枚の距離画像それぞれに含まれる特定の測距対象物までの距離値及び前記特定の測距対象物の前記二枚の距離画像中それぞれの位置に基づいて、前記特定の測距対象物の奥行き方向の移動ベクトルを算出する第1ベクトル算出手段と、を備えることを特徴とする。
(もっと読む)
画像処理装置及び画像処理方法、コンピュータプログラム及び記録媒体
【課題】 外部装置と画像処理装置の双方に特定領域を検出する処理を有する場合に、外部装置で検出した結果をそのまま印刷装置で用いると誤検出が増える。また、画像処理装置で検出処理の全ての項目を処理すると時間がかかってしまう。
【解決手段】 外部装置から画像データと前記画像データを解析して得られた撮影情報を入力し、入力された撮影情報に基づき、前記画像データから特定領域を検出する際の角度範囲またはサイズを設定し、設定された角度範囲またはサイズに基づいて、特定領域を検出する。
(もっと読む)
文字列の読み易さの判定方法、判定装置、判定プログラム
【課題】従来の文字フォント生成処理システムでは、新しく生成された複数の文字フォントにより表される文字列が読み易いか否かを判定することができなかった。
【解決手段】本発明に係る文字列の読み易さの判定方法は、所定の数式に従ってビットマップフォントのポテンシャルエネルギーE又は複雑度Cを算出する算出工程と、前記算出されたビットマップフォントのポテンシャルエネルギーE又は複雑度Cに基き、前記ビットマップフォントにより表される文字列の読み易さを判定する判定工程とを含む。
(もっと読む)
画像処理装置、方法およびプログラム
【課題】複数の動画像ストリーム間の同一性を簡単な処理で精度よく判定できるようにする。
【解決手段】ブロック設定部11は、入力された動画像データにおける現在のフレーム内に1つ以上の検索領域を設定し、さらに、それぞれの検索領域の中に、複数でかつ同一数の隣接画素からなるブロックを順次設定する。相関演算部12は、現在のフレームに設定されたブロック内の画像データと、このフレームの前または後のフレームにおける該当するブロックと同じ領域内の画像データとの相関を求める。位置情報出力部13は、相関演算の結果、各検索領域内で相関が最大であったブロックの位置を示す位置情報を、検索領域ごとに出力する。特徴量出力部14は、検索領域ごとに出力された位置情報を動画像データの各フレームに対応付けた情報を、この動画像データの特徴量として出力する。
(もっと読む)
サブピクセルテンプレートマッチング方法、当該方法を実現するコンピュータプログラムおよび当該プログラム格納媒体
【課題】画素単位で見たときに相関値が最大となる画素とその近傍画素における観測相関値を使って、高いマッチング精度を維持しながら従来の処理速度の遅さを改善できるサブピクセルテンプレートマッチング方法を提供すること。
【解決手段】最大相関時基準画素に局所相対座標の原点を置き、最大相関時基準画素とその所定の近傍画素の局所相対座標値を固定し、当該各局所相対座標に対応する全ての観測相関値と推定相関値分布曲面値との不一致量評価値計算値に対する、各局所相対座標に対応する観測相関値と推定相関値分布曲面値との不一致量の寄与度に相当する重みを各局所相対座標に予め与えることによって、重み付き最小二乗法により推定相関値分布曲面の極値座標を求める際の複数回の繰返し計算を1回の計算を行うだけで当該極値座標をサブピクセル単位で求めることでサブピクセルテンプレートマッチングを実現する。
(もっと読む)
201 - 220 / 771
[ Back to top ]