
Fターム[5L096FA34]の内容
Fターム[5L096FA34]に分類される特許
161 - 180 / 771
対象物の位置検出装置及び位置検出方法
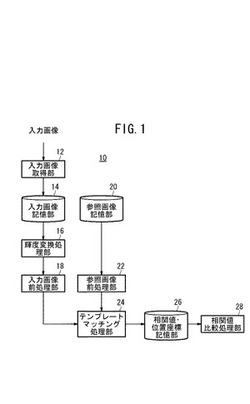
【課題】入力画像の撮影環境が変化しても、対象物の位置検出精度を向上できると共に、該対象物の位置を短時間で(高速に)検出する。
【解決手段】位置検出装置10は、入力画像を輝度変換して変換処理画像を生成する輝度変換処理部16と、入力画像と参照画像とのテンプレートマッチングを行って、入力画像に写っている孔の位置を検出すると共に、該位置における入力画像と参照画像との相関値を算出し、一方で、変換処理画像と参照画像とのテンプレートマッチングを行って、変換処理画像に写っている孔の位置を検出すると共に、該位置における変換処理画像と参照画像との相関値を算出するテンプレートマッチング処理部24と、各相関値を比較し、最大の相関値に対応する孔の位置を入力画像に写っている孔の位置として出力する相関値比較処理部28とを備える。
(もっと読む)
対象物の位置検出装置及び位置検出方法

【課題】入力画像の撮影環境が変化しても、対象物の位置検出精度を向上できると共に、該対象物の位置を短時間で(高速に)検出する。
【解決手段】位置検出装置10は、複数の異なる閾値を用いて入力画像の前処理を行って複数の前処理画像に変換する入力画像前処理部18と、各前処理画像と参照画像とのテンプレートマッチングをそれぞれ行って、各前処理画像に写っている孔の位置を検出すると共に、該各位置における各前処理画像と参照画像との各相関値を算出するテンプレートマッチング処理部24と、各相関値を比較し、最大の相関値に対応する孔の位置を入力画像に写っている孔の位置として出力する相関値比較処理部28とを備える。
(もっと読む)
画像処理方法および画像処理装置
【課題】どのような撮像手段であっても複数の出力画像に対して出力画像間の輝度変動を低減する。
【解決手段】撮像手段2によって撮影領域を時系列的に連続撮像された複数の取得画像について、画像処理装置1は、各取得画像ごとに、顔検出が行われた部分の平均輝度を代表輝度とする。周期的変動用処理手段15は、代表輝度の時間変動周期の整数倍となる処理期間を設定し、すべての処理期間において、上記処理期間に含まれる複数の取得画像のうち上記処理期間の周期に同期するタイミングで所定の1または複数の取得画像を抽出して出力画像を生成する。この周期的変動用処理手段15は、生成した出力画像を代表輝度の変動周期で画像表示手段3に順次出力する。
(もっと読む)
生体認証用装置、生体認証装置、生体認証システム、判別基準決定方法、生体認証方法、及びプログラム
【課題】生体認証の精度を向上させること。
【解決手段】
複数の生体サンプルから取得された生体パターンの相関に関する複数次元の相関データを主成分分析し、同一の生体サンプルに関する相関データ分布の第1主成分軸、及び異なる生体サンプルに関する相関データ分布の第1主成分軸を決定し、複数次元の相関データを各分布の第1主成分軸に射影させて各分布に関する1次元データを生成し、各分布の第1主成分軸上で当該各分布の分布中心から1次元データの各点までのマハラノビス距離を算出し、複数の生体サンプルに関して算出された各分布のマハラノビス距離に基づき、同一の生体サンプルと異なる生体サンプルとを判別するためのマハラノビス距離に関する判別基準値を決定する、生体認証用装置が提供される。
(もっと読む)
情報処理装置および方法、プログラム、並びに記録媒体
【課題】姿勢を推定することができるようにする。
【解決手段】シルエット抽出部12は、入力された画像内の被写体のシルエットを抽出し、輪郭抽出部13は、そのシルエット画像から被写体の輪郭を抽出する。特徴量抽出部14は、輪郭線からサンプル点を抽出し、サンプル点毎に特徴量を抽出する。マッチング部101は、姿勢記憶部16に記憶されている複数の姿勢毎の特徴量と、特徴量抽出部14で抽出された特徴量を用いてマッチングを行い、最尤姿勢の情報を出力する。フィッティング部102は、推定された姿勢と入力画像に対してフィッティングの処理を施し、点間の距離を求め、精度判定部103に出力する。精度判定部103は、フィッティング部102からのデータを基に、マッチング部101で推定された姿勢の精度を判定する。本発明は、ジェスチャーなどを判断する情報処理装置に適用できる。
(もっと読む)
白線検出装置
【課題】演算量を低減させることができ、かつ、誤検出を防止することができる白線検出装置を提供する。
【解決手段】カメラ1による撮像画像を俯瞰処理部2が俯瞰画像に変換し、俯瞰画像は区分線により複数の区画に区分されて表示部3に表示される。そして、複数の区画のうち一部の区画を選択する操作が選択操作部13に入力されると、切出し部14が、画像処理部4において画像処理が行われた後の画像全体から、選択された区画に対応した画像部分を切り出す。さらに、白線認識部9が、この画像部分について白線認識を行ない、テンプレート作成部10が認識された白線に基づいてテンプレートを作成し、テンプレートマッチング部11が画像全体についてテンプレートに表された白線に対して平行な白線の検出を行ない、検出白線出力部7により検出され白線が表示部3に表示される。
(もっと読む)
画像評価方法、画像評価装置、及び印刷装置
【課題】画像情報の評価を、より適切に行うことができる画像評価方法を実現する。
【解決手段】
取得された画像情報について、複数の項目から選択された1つの項目を所定項目として個別に評価し、個別評価を求めるステップと、他の1つの項目を他の所定項目として個別に評価し、他の個別評価を求めるステップと、これらの個別評価と他の個別評価とに基づき、ガウス関数を用いて総合評価を求めるステップと、個別評価、他の個別評価、及び総合評価を、取得された画像情報に付加する評価付加ステップとを行う。
(もっと読む)
モーションキャプチャデータの楽曲同期システムにおけるリズムマッチング並列処理装置およびそのコンピュータプログラム
【課題】モーションキャプチャデータから得られたリズム特徴量と楽曲データより得られたリズム特徴量の相関比較の計算処理時間を短縮できるようにする。
【解決手段】入力楽曲データの楽曲セグメントのビート情報と該入力楽曲データのビート特徴量と高い相関を示す動きビート特徴量をもつMoCapデータを保持する特徴量保持部2と、相関値計算の並列実行手順を登録された相関値計算並列実行手順登録部3と、相関値計算並列実行手順登録部3に登録された相関値計算の並列実行手順に従って、前記特徴量保持部2に保持された楽曲セグメントのビート情報とMoCapデータの動きビート特徴量との相関値を並列的に演算する相関値並列計算部4とを具備する。相関値並列計算部4は、楽曲セグメントのビート特徴量とMoCapデータの動きビート特徴量との相関値が高くなる相関値を並列的に求める。一例として、CUDAを用いて実現できる。
(もっと読む)
顔認識装置、顔認識方法及び顔認識プログラム
【課題】
顔部位の隠蔽物を検出することにより隠蔽されている顔部位を特定し、顔認識の精度を向上させる顔認識装置を提供する。
【解決手段】
顔認識装置10は、撮影手段100による撮像画像から鼻領域検出手段2が鼻領域を検出し、鼻領域の未検出時にはマスク着用判断手段3が撮像画像の輝度値からマスク着用を判断し、マスク領域検出手段31がマスク領域を検出し、マスク内鼻領域検出手段32がマスク領域から鼻領域を検出し、顔認識手段5が検出された鼻領域から眼領域を検出して顔認識を行うことから、マスク領域を検出することによりマスク領域をも利用して鼻領域に基づいて顔認識を行うこととなり、顔認識の精度を向上させることができる。
(もっと読む)
未知の顔の入力画像を既知の顔の基準画像と比較する方法
【課題】方法は、既知の顔の基準画像を使用して入力画像内の未知の顔を識別する。
【解決手段】各画像からHaar−like特徴ベクトルを抽出する。このベクトルを圧縮する。入力画像の圧縮特徴ベクトルと、基準画像のセットからの各圧縮特徴ベクトルとの間のL1ノルムを求めて、最も類似している基準画像を求める。最も類似している基準画像に関連付けられる顔のアイデンティティが、入力画像内の未知の顔のアイデンティティとして指定される。
(もっと読む)
物体検知識別装置
【課題】低フレームレートの映像であっても正しく背景更新のタイミングを得ることができる物体検知識別装置を得る。
【解決手段】画像比較部3は、入力画像と背景画像記憶部2の背景画像とを比較する。物体判定部4は、画像比較部3における画像比較の結果から物体の存在を判定し、判定結果を背景画像生成部5に出力する。背景画像更新用動き判定部6は、入力画像の時間的な変化から画像中の動きを抽出し、動き抽出結果を背景画像生成部5に出力する。背景画像生成部5は、背景画像更新用動き判定部6による動き抽出結果と、物体判定部4による物体判定結果と、現在の入力画像とに基づいて背景画像を更新する。
(もっと読む)
目標追尾装置
【課題】追尾対象物の見かけ上の色が変化した場合にも精度の高い追尾処理を行えるようにする。
【解決手段】時系列的に取り込まれる画像データ中の目標物体を追尾する目標追尾装置であって、追尾対象の指定を受け付ける追尾対象物指定受付部と、指定された追尾対象の色を目標色として設定する目標色設定部と、パーティクルを用いて、パーティクル周辺の色と目標色との比較によって求められる色尤度の測定を行ない、色尤度が所定の基準を満たす場合には、その測定結果に基づいて画像データ中の追尾対象の領域を推定する一方、色尤度が所定の基準を満たさない場合には、パーティクルを用いて、時間差のある画像データ間の輝度差分によって求められる輝度尤度の測定を行ない、その測定結果に基づいて画像データ中の追尾対象の領域を推定し、推定された領域中の色で目標色を更新するパーティクルフィルタ処理部を備える。
(もっと読む)
補間フレーム作成装置及び補間フレーム作成方法及び放送受信装置
【課題】特に特殊な時間的周期性を持って処理された画像に対して動きベクトル検出の安定性が維持できるようにし、良好な補間画像を提供する。
【解決手段】本発明の一実施例では、入力フレーム間の検索エリア内のブロックマッチング処理により、前記動きベクトル候補を検出する判定部と、前記検出した動きベクトル候補に基づいて前記入力フレーム間の対応ブロックを決定して前記補間フレームの補間ブロックの画像を作成する補間画像作成部と、前記入力フレームの画質変動の時間的周期性を示す情報に基づいて、前記動きベクトル候補が複数検出されると推定される特定期間を設定する画質変動情報検出部と、前記特定期間では少なくとも前記判定部が前記動きベクトル候補を一意に検出しやすい方向へ閾値の可変を行う処理動作制御部を有する。
(もっと読む)
画像処理方法および画像処理装置
【課題】回路規模を小規模にでき、かつ、閾値を変更することなく高速で良好に画像のパターンマッチングを行うことができるようにする。
【解決手段】画像処理装置は、原画像入力部1が入力した原画像からエッジ画像を生成する原画像のエッジ抽出部2と、原画像のエッジ抽出部2が生成したエッジ画像を互いに異なる閾値にもとづいて2値化し、複数の2値画像を生成する原画像用2値化部3と、原画像用2値化部3が生成した複数の2値画像のそれぞれとメモリ部7に格納された参照用の2値画像との間で相関値を算出する相関部8と、相関部9が算出した複数の相関値の中から最も相関が高いことを示す相関値を選択する相関値選択部9とを備えている。
(もっと読む)
映像処理装置および映像処理装置の制御方法
【課題】撮影による動きぼやけのある映像について、動きぼやけのある領域に対して適切な画質の改善処理を施すことができる映像処理装置を提供する。
【解決手段】本発明の映像処理装置は、フレームの画像を分割した検出単位ごとに、動きベクトルの検出を行い、動きベクトルの大きさ及び検出単位の近傍の抽出領域から抽出した特徴量に基づいて動きぼやけを検出する。続いて検出単位ごとに、動きぼやけの有無と大きさに基づいて改善処理値を決定し補正する。
(もっと読む)
画像評価装置および画像評価方法
【課題】勾配方向の推定を要しない画像評価装置および画像評価方法を提供する。
【解決手段】画像評価装置が,原画像から,複数の部分領域を抽出する部分領域抽出部と,前記複数の部分領域に対応する,前記画像での画素値の勾配に対応する画素値の画素を有する,複数の抽出画像を生成する抽出画像生成部と,前記複数の抽出画像に対応する,複数の自己相関係数を算出する自己相関算出部と,前記複数の自己相関係数の代表係数値を導出する代表係数値導出部と,前記代表係数値の分布に基づいて,前記画像の良否を判定する判定部と,を具備する。
(もっと読む)
網点形状評価装置、網点形状評価プログラム、及び網点形状評価方法
【課題】印刷画像を構成する網点の形状を、評価の基準となる比較元の印刷画像の網点の形状と比較することにより、印刷画像を構成する網点の形状を正確かつ定量的に評価することができる網点形状評価装置等を提供する。
【解決手段】評価対象である印刷画像から所定数の網点を含む評価網点画像を取得する手段と、評価の基準となる比較元の印刷画像から所定数の網点を含む比較元網点画像を取得する手段と、複数の評価網点画像を正規化した正規化ベクトルから算出されたN次元の固有ベクトルとし、複数の比較元網点画像を正規化した正規化ベクトルから算出されたM次元の固有ベクトルとしたとき、行列X’[xij]の最大固有値又は第i固有値までを算出する手段と、算出された最大固有値、又は第i固有値までの積を、評価対象の印刷画像を構成する網点形状と比較元の印刷画像を構成する網点形状の類似度を示す評価指標値として取得する手段を有する。
(もっと読む)
監視装置
【課題】被写体と撮像装置との距離の違いによる動きベクトルの見かけの大きさに誤差を生じたり、監視領域内の状態の変化の原因を特定することが困難となったりすることを解消することにより、効果的な監視を行うこと。
【解決手段】画像処理手段である画像処理プロセッサの動き検出手段(ステップS103のブロックマッチング処理)により入力画像の少なくとも2個以上の部分画像に対してそれぞれの部分画像の時間的な動きが動きベクトルとして検出され、画像処理プロセッサの動き補正手段(ステップS104の動き補正処理)により動きベクトルが撮像装置の撮像条件に基づいて補正され、画像処理プロセッサにより動き補正手段によって検出された動きベクトルに基づき監視領域の状態が判定されるようにした。
(もっと読む)
3次元物体モデル情報生成装置及びプログラム
【課題】正確な3次元物体モデル情報を生成する装置を提供する。
【解決手段】装置は、入力される画像の集合から、任意の2つの画像の組を複数生成し、生成した画像の組に関連付けられ、関連する組の画像の対応する画素を示す視差マップを生成する視差マップ生成手段と、各画像の組及び各組に関連付けられた視差マップに基づき、3次元空間の位置を複数示す奥行き候補位置情報を出力する奥行き候補位置情報生成手段と、奥行き候補位置情報に基づき、被写体表面の3次元空間位置を示す3次元物体モデル情報を生成する調整手段と、調整手段が生成した3次元物体モデル情報の合否を閾値により判定する判定手段とを備えている。
(もっと読む)
相関処理装置及びその相関処理装置で読みとり可能な媒体
【課題】
テクスチャサイズの設定又はウインドウの位置に自由度が求められた場合において、テクスチャとウインドウの相関関係を求める計算に対して、効率的な並列処理が可能な構成を有する画像処理装置を提供することを目的とする。
【解決手段】
探索したい画像の第1画像ピクセル値と、部分画像の第2画像ピクセル値とを演算する機能を有するN個(Nは正の整数)の演算回路と、M個(MはNより小さい正の整数)の構成要素を有する矩形パタンであって、探索したい画像を矩形パタンによって分割したときの分割数が最小となるような矩形パタンを選択する矩形パタン選択回路と、N個の演算回路の内、M個の演算回路を活性化するとともに、M個の演算回路によって演算が行われるM個の第1画像ピクセル値及びM個の第2ピクセル値を特定する制御回路と、M個分の演算回路によって得られた演算結果を積算する積算器と、を備える相関処理装置を提供する。
(もっと読む)
161 - 180 / 771
[ Back to top ]