
Fターム[5L096FA70]の内容
Fターム[5L096FA70]に分類される特許
1 - 20 / 88
画像処理装置、画像処理方法及び画像処理プログラム
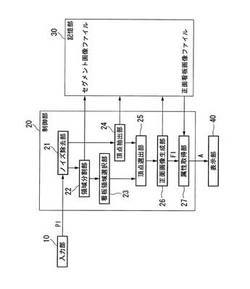
【課題】斜めから撮影された看板が写った画像から看板の画像領域を検出する。
【解決手段】画像中の画像領域の矩形度、該画像領域と該画像領域の周辺領域との色差、または該画像領域のエッジ比のうちいずれか1つまたは2つ以上の組に基づいて、画像から看板の画像を表す看板領域を選択する看板領域選択部23を備える。
(もっと読む)
電子機器及び抽出方法

【課題】動画像から、ある動きをする物、人、動物などを簡便に抽出する。
【解決手段】電子機器1は、オブジェクトの動きを表現するリズム情報の類似度に基づいて動画像からオブジェクトを抽出する電子機器であって、オブジェクトの抽出に用いる抽出用リズム情報を取得する抽出用リズム情報取得部40と、抽出用リズム情報取得部40によって取得された抽出用リズム情報と、動画像内のオブジェクトのリズム情報との類似度を算出する算出部60と、算出部60によって算出された抽出用リズム情報との類似度が所定の閾値以上であるリズム情報として当該動きが表現されているオブジェクトを動画像から抽出する抽出部70とを備える。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
画像解析方法および画像解析装置
【課題】画像処理の専門知識を要することなく、適切に薬効を判定することができる画像解析方法等を提供する。
【解決手段】生物学的試料の画像の特徴量と、前記画像に対応する薬効の程度との組み合わせ組み合わせに基づいて、複数の前記特徴量を用いた演算により前記薬効を算出するためのアルゴリズムを取得、最適化する。前記アルゴリズムを用いて、特徴量が取得された画像が示す薬効を算出する。
(もっと読む)
文字の形状特徴を使用した文字比較による文書改変検知方法
【課題】文書改変検知方法は、文字を実際に認識することなく、文字の形状特徴を比較することにより、オリジナル画像とターゲット画像を比較する。
【解決手段】文字の境界ボックスが両方の画像について生成され、それぞれの境界ボックスは一つの文字に関する一つ以上の連結されたピクセル群を有する。オリジナル画像およびターゲット画像の境界ボックスは、対応するペアを形成する。一方の画像中にある境界ボックスが、もう一方の画像中に対となる境界ボックスを持たない場合、文書の追加および削除が検知される。境界ボックスの各ペアはその形状特徴を比較するために処理される。形状特徴は、文字のオイラー数と、境界ボックスのアスペクト比と、境界ボックスのピクセル密度と、二つの文字間のハウスドルフ距離とを含む。二つの文字は、形状特徴の比較に基づき、同一の文字または異なる文字と判定される。
(もっと読む)
表情判定プログラムおよび表情判定装置
【課題】表情判定に用いる特徴点を高速に検出することを課題とする。
【解決手段】表情判定装置200は、顔部位検出部221、設定部222、特徴点検出部223および判定部224を有する。顔部位検出部221は顔画像から複数の顔部位を検出する。設定部222は、複数の顔部位の少なくとも一つを用いて口領域処理範囲を設定する。特徴点検出部223は、口領域処理範囲の画素分布に基づいて右口角および左口角を含む口領域を決定し、口領域から右口角および左口角の位置を検出する。判定部224は、口領域の縦横比率、口領域の面積および口領域における右口角の位置および左口角の位置に応じたポイントを付与することで被験者の表情を判定する。
(もっと読む)
体積検出装置、及び、体積検出方法
【課題】対象物の位置や姿勢、挙動等によって隠蔽部が生じることがあっても、シート上の対象物の体積を正確に検出することのできる体積検出装置、及び、体積検出方法を提供する。
【解決手段】対象物の距離画像データを距離画像センサ4で取得する。取得した距離画像データをデータ記録手段25に記録する。可視部分から推定される対象物の体積を現在体積算出手段24によって算出する。現在と過去の距離画像データを比較し、対象物の中で距離画像センサ4の位置から隠れている部分の体積を隠蔽体積算出手段26によって検出する。現在体積算出手段24で算出した体積と、隠蔽体積算出手段26で算出した体積と、を基に対象物の体積を算出する。
(もっと読む)
画像解析装置、画像解析方法及びプログラム
【課題】画像の中から特定領域を適切に抽出できるようにする。
【解決手段】入力された画像を複数のブロックに分割し、前記分割されたブロックの色相および輝度の少なくともいずれかに基づいて、前記画像から特定領域の候補領域を抽出する。そして、前記抽出された候補領域の形状に基づいて、前記候補領域の評価値を算出し、前記算出された評価値に基づいて、前記候補領域の中から特定領域を抽出する。このとき、前記ブロックに対する前記候補領域のサイズの比率に応じて、前記評価値を補正するようにして、被写体領域の形状の誤評価を低減できるようにする。
(もっと読む)
画像認識装置、画像認識方法及びプログラム
【課題】画像中の被写体を精度良く追尾できるようにする。
【解決手段】入力された画像から被写体領域を特定し、前記特定された被写体領域の位置を代表する注目点を算出して前記被写体領域を追尾する画像認識装置であって、前記注目点を含む領域が前記被写体領域と異なる領域である場合には前記注目点の位置を前記被写体領域の内部に補正し、前記補正された位置の注目点に基づいて前記被写体領域を追尾するようにして、例えば、ドーナツ型の形状の被写体を検出する場合も精度良く被写体を追尾できるようにする。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
物体検出装置
【課題】ノイズを低減して移動物体の飛び出しを精度よく検出する物体検出装置を提供する。
【解決手段】物体検出装置1は、取得した画像情報から障害物を検出する障害物検出部21と、障害物検出部21が検出した障害物の近傍にある道路境界線を画像情報から取得する境界線取得部23と、境界線取得部23で取得した道路境界線の連続性を計算する連続性演算部25と、を備え、現在の画像情報について境界線取得部23で得られる道路境界線の連続性と、過去の画像情報について境界線取得部23で得られる道路境界線の連続性と、に基づいて障害物の飛び出し確率を算出する。
(もっと読む)
煙検出用周波数成分特定方法、および煙検出装置
【課題】フーリエ変換処理を用いることなく、煙のゆらぎスペクトルの周波数成分を簡易的に求め、気流に流される煙を検出する。
【解決手段】監視カメラにより時系列で撮像された複数の画像からなる時系列データに基づいて、注目領域において、異なるサンプリング間隔によるフレーム差分画像を生成する差分画像生成手段21と、異なるサンプリング間隔で生成されたそれぞれのフレーム差分画像ごとに、注目領域の差分量を算出する差分量算出手段22と、算出されたそれぞれの差分量の中で、最大となる差分量に対応するサンプリング間隔の逆数を、注目領域の時間スペクトルのピークを示す周波数成分として特定する対象周波数成分特定手段23とを備える。
(もっと読む)
手指ジェスチャ検出装置
【課題】安価且つ高速に手指の状態を検出することが可能な手指ジェスチャ検出装置を提供する。
【解決手段】手指ジェスチャ検出装置は、光源11,12と、1つのカメラ20と、画像認識部30とからなる。光源11,12は、検出面1に入力される手指2に対して複数の位置から光を照射し、複数の照射光にそれぞれ対応する手指の複数の影の像21,22を検出面1上に形成するものである。1つのカメラ20は、検出面1に対して垂直方向に離れた位置に配置され、複数の光源11,12により形成される複数の影の像21,22及び手指2の像を撮像するものである。画像認識部30は、1つのカメラ20により撮像される複数の影の像21,22及び手指2の像を認識し、影の像21,22及び手指2の像の状態により検出面1に入力される手指2の状態を検出する。
(もっと読む)
ビデオ監視時に移動物体を分類するシステムおよび方法
【課題】ビデオ監視時にあらゆる移動物体を既定のクラスに分類できるシステムおよび方法を提供する。
【解決手段】ビデオによる監視時に移動物体を分類するシステムは、移動物体のシルエット画像を撮影するステップと、撮影された画像の大きさを変更するステップと、大きさが変更された画像の中の移動物体の幅に対する高さの平均比と重心を計算するステップと、大きさが変更された画像を分割するステップと、物体の平均高さと平均幅とを比較するステップと、さらに、重心の分散と所定の閾値とを比較して、撮影されたシルエット内の物体を既定のクラスに分類するステップとを含む。
(もっと読む)
ステレオ画像による3次元位置姿勢計測装置、方法およびプログラム
【課題】ステレオ誤対応データが含まれていても、対象物の3次元位置姿勢を計測することができる装置、方法及びプログラムを提供する。
【解決手段】3次元位置姿勢計測装置は、撮像装置C1〜C3によって対象物を撮像して得られた画像データを受信する入力部4と演算部1とを備え、演算部が、重複することなく選択された2枚の画像データのペアに関して、3次元復元点集合および特徴量集合を求め、各ペアに関する3次元復元点集合および特徴量集合を、全て加算して全3次元復元点集合および全特徴量集合を求め、対象物のモデルデータに関するモデル特徴量集合を、全特徴量集合と照合することにより、3次元復元点集合の中から対象物のモデル点に対応する点を決定し、3次元復元点集合が、画像データ中の対象物の境界線を分割したセグメントの3次元位置情報を含み、特徴量集合が、セグメントの頂点に関する3次元情報を含む。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】画像探索のロバスト性を向上させることを課題とする。
【解決手段】画像処理装置1は、同一の物体が異なる視点で画像内に収められた複数の画像を取得する画像取得部2を有する。さらに、画像処理装置1は、画像取得部2によって取得された画像のうち少なくとも1つの画像から得られる特徴点の周辺領域を局所特徴領域とし、当該局所特徴領域の画像から2次元特徴量を導出する2次元特徴量導出部3を有する。さらに、画像処理装置1は、画像取得部2によって取得された複数の画像から局所特徴領域における物体の視差に基づく3次元特徴量を導出する3次元特徴量導出部4を有する。さらに、画像処理装置1は、2次元特徴量導出部3によって導出された2次元特徴量および3次元特徴量導出部4によって導出された3次元特徴量を用いて、特徴点間のマッチングを行うマッチング処理部5を有する。
(もっと読む)
コンピュータ入力画像中のマーカ認識においてトポロジカルな領域の隣接性とGeometricHashing法を併用するマーカ認識方法
【課題】入力画像中のマーカ認識において以下の(イ)〜(ハ)の問題を解決する。
(イ)既存のトポロジー情報によるマーカ認識手法において同一トポロジー構造だが別図像のマーカ間の区別ができない
(ロ)既存のトポロジー情報によるマーカ認識手法において6自由度の姿勢推定ができない
(ハ)GEOMETRIC HASHING法において、試行すべき基底の数が多いとメモリ使用量や計算量が増大する
【解決手段】 既存のトポロジーによる方法では出来なかった同一トポロジー構造だが別図像のマーカ間の区別と、3次元空間内での姿勢推定を、トポロジー情報とマーカ各領域の重心を使用しGEOMETRIC HASHING法を適用して可能にする。また、GEOMETRIC HASHING法の際にトポロジー情報を併用し基底を選択することで、メモリ使用量や計算量を減少させる。
(もっと読む)
デジタル画像における滴を検出する方法および装置ならびにこの方法を実行するためのコンピュータプログラム
【課題】デジタル画像における滴を検出する方法および装置ならびにこの方法を実行するためのコンピュータプログラムの提供。
【解決手段】透明壁上の滴を検出する方法であって、画像取得システムによって上記壁を通してデジタル画像(I11−I15、I111−I115、I211−I215、I311−I315)が取得され、以下の工程:
b) 各画素に、その画素の勾配値を割り当てることによって、デジタル画像(I16)から勾配画像を確立する工程と;
c) ランクフィルタリングによって取得した値を各画素に割り当てることによって、勾配画像をフィルタリングする工程と;
d) フィルタリングされた画像における画素値と勾配画像における画素値との差が所定値を超える画素を活性化することによって、デジタル画像における検出された滴の位置を表すマスクを確立する工程と;
を含む方法である。
この方法によって、画像または画像シーケンスにおける滴の堅調な検出が可能になる。
この方法を実行するための、滴の検出用プログラムおよび装置。
(もっと読む)
ヒューマンインタラクションによる軌跡に基づいたシステム
ユーザインタフェースによるヒューマンインタラクションを取り入れた、ビデオ系列において動くオブジェクトを検出する軌跡に基づいた技術を使用する方法及び関連する装置に関する。本方法は、ビデオフレームにおいて、接続されたコンポーネントのセットを識別及び評価し、接続されたコンポーネントの特徴を予め決定された基準と比較することで接続されたコンポーネントのリストをフィルタリングし、複数のフレームにわたり候補となる軌跡を識別し、候補となる軌跡を評価して選択された軌跡を決定し、インタフェースの使用により誤った軌跡を除き、評価及び除くステップに応じて、ビデオ系列における画像を処理する。  (もっと読む)
(もっと読む)
障害物検出装置
【課題】様々な姿勢が予想される一般に困難である人等の検出対象物体の検出が、その動静や姿勢にかかわりなく高精度に検出することが可能な障害物検出装置を提供する。
【解決手段】時間的に連続する画像を取り込む画像取得部101と、画像について主に動体を検出するモーションベース検出部120と、画像について主に静物を検出する非モーションベース検出部120と、を有し、非モーションベース検出部は、画像の任意の所定領域(車両幅分の前、または後ろ)のみを対象とし、モーションベース検出部は、画像の所定領域より広い範囲を検出対象とする。
(もっと読む)
1 - 20 / 88
[ Back to top ]