
Fターム[5L096GA13]の内容
Fターム[5L096GA13]の下位に属するFターム
Fターム[5L096GA13]に分類される特許
1 - 20 / 27
領域成長法によるラベリングの高速化
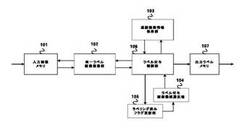
【課題】領域成長法を用いたラベリング処理を高速化する。
【解決手段】入力画像メモリと、近傍画素から処理対象画素と同一のラベルが付与される条件を満たす画素を探索する同一ラベル画素探索部と、前記同一ラベル画素探索部から出力される連結対象画素の位置情報を記録する連結画素情報保持部と、処理対象画像の全画素について「ラベル付与済み画素フラグ」を保持するラベリング済みフラグ更新部と、「ラベル付与済み画素フラグ」からプライオリティエンコーダにより次にラベルを付与する画素候補の位置情報を1つ選択して出力するラベル付与画素候補選択部と、前記連結画素情報保持部で保持される連結画素の情報と前記ラベル付与画素候補選択部の出力情報から次にラベルを付与する処理対象の画素と次のラベル番号とを決定するラベル付与制御部と、画素位置とラベル番号を基に各々の画素のラベル番号を書き込む出力ラベルメモリとを有する。
(もっと読む)
領域検出装置、領域検出方法及びプログラム

【課題】白飛びに頑健な領域検出を実現できるようにする。
【解決手段】実施形態によれば、領域検出装置は、輪郭線抽出手段と、明暗判定手段と、変化点検出手段と、輪郭線修正手段と、領域取得手段とを具備する。輪郭線抽出手段は、入力画像から輪郭画素の系列を輪郭線毎に抽出する。明暗判定手段は、抽出された輪郭画素の系列を構成する輪郭画素の各々が予め定められた範囲内の画素と比較して明るいか或いは暗いかの明暗を判定する。変化点検出手段は、判定された明暗が対応する輪郭線上で変化する変化点を、輪郭画素の系列から検出する。輪郭線修正手段は、検出された変化点において対応する輪郭線を繋ぎ直すことにより、修正された輪郭線を構成する輪郭画素の系列を取得する。領域取得手段は、修正された輪郭線を構成する輪郭画素の系列を、入力画像から検出された領域の情報として取得する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】取得画像のコンテンツに依存することなしに画像の歪み及び変形を補正することを可能にする画像処理方法等を提供する。
【解決手段】画像処理方法は、取得画像におけるオブジェクト領域の輪郭の角を推定し、オブジェクト領域から離れる方向に沿って所定角度範囲内でその推定された角からオフセットされる2つの点の間でオブジェクト領域の輪郭線を探し、オブジェクト領域の輪郭の最終的な角として輪郭線の交差点を決定し、オブジェクト領域の最終的な輪郭として前記最終的な角の間の輪郭線を決定する。
(もっと読む)
文字の読みやすさ評価方法
【課題】文字の読みやすさを定量化して評価することができる評価方法を提供する。
【解決手段】文字の読みやすさ評価方法は、文字図形を含む2値画像の文字線に対応する第1画素値を有する所定数以上のピクセルが連結している第1領域の数と、第1画素値を有するピクセルで囲まれた第2画素値を有する1つ以上のピクセルを含む第2領域の数とを検出するステップと、2値画像を平滑化処理して濃淡画像に変換するステップと、濃淡画像の階調に基づく2値化閾値を所定値ずつ変化させて、各2値化閾値で2値化された際の2値化された濃淡画像に含まれる第1領域の数と、第2領域の数とを、2値化閾値毎に検出するステップと、2値化された濃淡画像で検出される第1領域の数、第2領域の数が、2値画像で検出される第1領域の数、第2領域の数と同じ値で連続する2値化閾値の範囲を識別して範囲の下限値又は/及び上限値を算出するステップと、を含む。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】線ではない画像を線であると誤って抽出してしまうことを防止するようにした画像処理装置を提供する。
【解決手段】画像処理装置の線情報受付手段は、線の可能性がある画像に関する情報であって、線を構成し得る矩形の画素塊である線要素を示す情報の集合を受け付け、線抽出手段は、前記線情報受付手段によって受け付けられた線要素を示す情報と線の追跡方向に基づいて、線の開始点から末尾点まで追跡を行うことによって線を抽出し、反転手段は、前記線抽出手段によって抽出された線の末尾点を開始点とし、前記線の追跡方向を反転させ、前記線抽出手段へ該開始点と線の追跡方向を渡し、判別手段は、前記反転手段による処理を行わせるか否かを判別する。
(もっと読む)
特徴図形付加方法、特徴図形検出方法、特徴図形付加装置、特徴図形検出装置、およびプログラム
【課題】対象とする図形領域以外の矩形、直線、図形等が原因となる誤検出を低減し、対象の図形領域の検出の精度を高めること。
【解決手段】対象画像データに付与する図形に応じて予め決められており、前記図形内における位置エリアに応じて画素値が異なる特徴量を決定し、当該特徴量を示す特徴量情報を出力する特徴量生成ステップと、入力する特徴量情報に基づき、前記予め決められている特徴量を含む画素値によって特徴図形を表わす特徴図形パターンを生成し、この特徴図形パターンを示す情報を出力する特徴図形パターン生成ステップと、前記対象画像データに対して前記特徴図形パターンを付与して特徴図形付加画像を作成し、当該特徴図形付与画像の画像データを出力する矩形付加ステップと、を備えることを特徴とする。
(もっと読む)
線画処理装置、線画処理方法およびプログラム
【課題】描画線に基づいた領域分離を高精度に実施することを容易とする技術を提供する。
【解決手段】線画処理装置100は、線画から芯線CL1を抽出する芯線抽出部21と、芯線CL1の端点TP1を抽出する端点抽出部22と、端点TP1から延長線ELを延伸させる延伸方向EDとして、前記端点まで続く芯線CL1の描画方向DDに基づいて、端点TP1から射出させる射出方向SDと、射出方向SDに射出された延長線EDを所定方向に湾曲させる湾曲方向CDとを決定する延伸方向決定部24とを備える。
(もっと読む)
画像認識プログラム、画像認識装置、画像認識システム、および画像認識方法
【課題】画像から所定の物体または図柄の輪郭を高い精度で検出できるようにすること。
【解決手段】まず、画像における第1画素の画素値と、当該第1画素から所定画素数だけ離れた位置にある第2画素の画素値との差分を計算する。そして、当該差分が所定値以上である場合に、第1画素またはその近傍画素の画素値と、第2画素またはその近傍画素の画素値とに基づいて、エッジ判定閾値を計算する。そして、第1画素と第2画素に挟まれた各画素の画素値とエッジ判定閾値とを比較することによって、第1画素と第2画素の間に存在するエッジに対応するエッジ画素を検出する。
(もっと読む)
照明灯検出方法
【課題】駅構内等の天井部等に設置された多数の照明灯の撮影画像に基づき各々の存在を正確に検出し、照明灯の自動清掃システムを実現できる照明灯検出方法を提供する。
【解決手段】この照明灯検出方法は、照明灯を可視光カメラ22によって撮影し画像データを得るステップS11と、二次元画像領域で任意な線33を設定し線上の複数画素に係る画像データを取り出し、画像データの中から輝度極大値に係る画素を検出し、この画素を初期検索位置に設定するステップS12と、初期検索位置を基準とし、検索範囲を設定し、画像データから照明灯候補の画素を検出するステップS13と、擬似形状画素を算出し、この擬似形状画素による擬似形状と照明灯候補画素とを比較して照明灯であるか否かを判断するステップS14を有する。
(もっと読む)
データ生成方法および画像検査方法
【課題】ビットマップ画像における図形の輪郭線に関するデータを高速かつ正確に生成するデータ生成方法および、このデータ生成方法を用いた画像検査方法を実現する。
【解決手段】図形の輪郭線に関するデータを生成する処理を演算処理装置により実行するデータ生成方法は、設計上の図形の中心線をビットマップ画像に重ね合わせるステップと、中心線が重ね合わされたビットマップ画像上において、中心線上に位置する各探索基準点について所定の探査方向に向かって中心線上に位置するビットの色とは異なる色のビットを探索し、検出したビットを輪郭候補点とするステップと、各探索基準点に対して、輪郭候補点の中から当該探索基準点からの距離が最短となるもの抽出してこれを所望の図形の輪郭を構成する輪郭点とするステップと、対応する探索基準点の配列順に輪郭点間を結線したラインを輪郭線として確定して輪郭線に関するデータを出力するステップと、を備える。
(もっと読む)
対象物追跡装置及びプログラム
【課題】対象物が路面に接する接地位置が撮影範囲から外れたり、遮られたりしている場合であっても、自車両の直近まで対象物を追跡して、精度よく対象物の路面上の位置を推定する。
【解決手段】対象物検出部42で、過去の撮像画像から求められた対象物の路面上の位置、及び車両運動情報に基づいて、現在の対象物の路面上での位置を予測して、対応する現在の撮像画像上の位置に検出枠を設定することで対象物を検出し、第1の位置推定部48で、検出枠範囲判定部44で検出枠の下側領域が撮影範囲内であると判定された場合に、検出枠内の画像の足元位置に基づいて、対象物の現在位置を推定し、第2の位置推定部50で、検出サイズ判定部46で検出枠のサイズが予め定めた大きさ以上であると判定された場合に、過去の撮像画像における対象物に対する現在の撮像画像における対象物の拡大率に基づいて、対象物の路面上の現在位置を推定する。
(もっと読む)
スキャンされた文書画像内の前景画素群の連結グループをマーキング種類に基づき分類する方法及びシステム
【課題】文書内の画像上のマーキングをマーキング種類に従って分類する。
【解決手段】
画像を含んだ文書を区分器112aに供給する。区分器112aは、連結成分を見つけることで、その画像を、同じマーキング種類である可能性が高いと識別される前景画素構造の複数の断片へと分割し、横方向に近い罫線及び縦方向に近い罫線を削除し、いくつかの連結成分を更に分割することで断片群を求める。分類器112bは各断片についてのカテゴリスコアを求める。ここで分類器112bは各画素が既知のマーキング種類に従ってラベル付けされているグランドトゥルース画像群により学習したものである。断片が分類器112bにより分類されると、その断片に含まれるすべての画素に同じラベルを割り当てられる。
(もっと読む)
欠陥検出方法、欠陥検出装置、および欠陥検出プログラム
【課題】直線を基調とした外周輪郭を有する被検査物に対して、精度よく輪郭形状欠陥を検出可能な欠陥検出方法、欠陥検出装置、および欠陥検出プログラムを提供する。
【解決手段】欠陥検出方法は、被検査物の外周輪郭部を検出する輪郭検出工程と、外周輪郭部を1周する輪郭追跡方向を設定する追跡方向設定工程と、輪郭追跡方向に沿って連続する2画素間の画素方向を検出する画素方向検出工程と、画素方向が変化する方向変化点を検出する方向変化点検出工程と、連続する3つの方向変化点から画素方向の差である第一および第二方向差を算出する方向差算出工程と、第一および第二方向差に基づいて形状変化点を抽出する形状変化点抽出工程と、形状変化点間の距離が欠陥閾値以下となる欠陥候補部を抽出する欠陥候補抽出工程と、欠陥候補部のサイズがサイズ閾値以上となる欠陥部位を検出する欠陥検出工程と、を具備した。
(もっと読む)
画像処理におけるパターンモデルの位置決め方法、画像処理装置、画像処理プログラム及びコンピュータで読み取り可能な記録媒体
【課題】サーチ対象画像の図形によらず、精密位置決めの結果を安定して得る。
【解決手段】
予め登録された登録画像に対応するパターンモデルを用いて、サーチ対象画像中から該登録画像に類似するサーチ対象物をサーチして位置決めを行う際に、注目点と、該注目点に対応する対応点との位置関係で最小二乗法計算で用いるエラー値を演算し、これらの値から最小二乗法で得られる連立方程式を解き、所定の精度で与えられた初期位置よりも高い精度で位置決めを行う画像処理におけるパターンモデルの位置決め方法であって、前記最小二乗法が、理想の位置と一致したときに最小となる項と、最小二乗法の変数である試行パラメータと一致したときに最小となる項とを含むものである。
(もっと読む)
移動物体追跡装置
【課題】撮像装置に水滴が付着しても正確に画像追跡し且つ処理負荷が小さい移動物体追跡装置を提供すること。
【解決手段】本発明の移動物体追跡装置10は、基準画像142の変化領域から第1の色ヒストグラムを抽出し、入力画像の変化領域から第2の色ヒストグラムを抽出する特徴抽出手段1313と、第1の色ヒストグラムと第2の色ヒストグラムとが類似する場合に変化領域を画像入力部に付着した水滴により生じた水滴変化領域と判定し、類似しない場合に変化領域を非水滴変化領域と判定する水滴判定手段1314と、入力画像の非水滴変化領域から抽出された特徴情報と移動物体情報141の特徴情報とを用いて、非水滴変化領域と移動物体情報141との対応付けを行う対応付け手段132と、非水滴変化領域と移動物体情報141との対応付けに基づいて、非水滴変化領域に対応付けられた移動物体情報141を更新する移動物体情報更新手段134と、を備える。
(もっと読む)
物体認識装置及びプログラム
【課題】特別な装備を設けることなく映り込み画像による物体の誤認識を防止して、物体認識の精度を向上させることができる物体認識装置及びプログラムを提供する。
【解決手段】撮像装置12で撮像された画像からエッジ検出により複数の特徴点を抽出し、車両が走行している場合に、最新の画像の特徴点と1フレーム前に撮像された画像の特徴点との対応付けを行い、対応付けられた特徴点の座標が同一の場合には、固定特徴点の候補点として候補数カウントと共に記憶しておく。所定フレーム分の各画像に対して処理を繰り返して候補点を判定し、記憶した候補点と座標が同一であれば候補数カウントに1を加算し、候補数カウントが所定値以上となった候補点を固定特徴点として決定し、最新の画像から抽出された特徴点から固定特徴点を除去する。
(もっと読む)
道路区画線検出装置および道路区画線検出方法
【課題】処理負荷を高めることなく、ボッツドッツや白線等を正確に認識できる道路区画線検出装置を提供すること。
【解決手段】道路区画線検出装置は、路面画像中の所定の領域を道路区画線を検出する対象の領域である検出対象領域として設定する検出領域設定手段と、検出領域設定手段によって設定された検出対象領域内の画像データを処理して道路区画線を検出する検出手段とを備える。そして、検出領域設定手段は、道路区画線が検出できていない状態である未検出状態における検出対象領域と、当該道路区画線を一旦検出した後の状態である検出後状態における検出対象領域とで異なる大きさの検出対象領域を設定する。このとき、検出後状態における検出対象領域は、未検出状態における検出対象領域よりも道路幅方向の長さが短い領域が設定される。
(もっと読む)
画像抽出装置、及び画像抽出プログラム
【課題】スキャン画像から矩形画像を抽出する際の雑音耐性を強化する。
【解決手段】画像抽出装置10は、スキャン画像を取得し、取得したスキャン画像の二値画像を生成するとともに、当該生成された二値画像から連結画素を検出し、検出した連結画素に対して設定した外接矩形の各辺において、連結画素との接点から当該接点の属する辺の一方の頂点へと至る線分上の複数の点から、その辺に対して垂直方向に走査してエッジ画素を検出する。画像抽出装置10は、検出されたエッジ画素がスキャン画像に写し出された対象物の輪郭部に位置する画素であるか否かを判断し、対象物の輪郭部に位置する画素であると判断されたエッジ画素に基づいて矩形領域を設定し、設定された矩形領域から画像を抽出する。
(もっと読む)
画像処理装置
【課題】輪郭線の形状の特徴として、特定条件の窪みを効果的に抽出することができると共に、複数の窪みが入り組んでいる構造の特徴も把握することができるようにし、又同様にして、輪郭線の形状の特徴としてその突起も抽出及び構造特徴把握可能とする。
【解決手段】2次元画像に含まれる輪郭線1の、窪みの特徴を示す抽象データを生成するために、輪郭線1上で開始点Sを定め、開始点Sから、探索点T1、T2のような探査点を該輪郭線1上において順次移動させる。又、移動後に、例えば探索点T2において、該移動方向に膨らむ形状の、折れ線又は曲線による探索弧20−2を、探索点の移動方向に対して所定の相互位置関係で発生する。探索弧20−2が、探索点以外で輪郭線1に接触乃至所定基準内まで接近するか否か判定しつつ、輪郭線1の窪みの有無を判定する。
(もっと読む)
物体追跡方法、物体追跡システム、及び物体追跡プログラム
【課題】複数の物体を遮蔽(オクルージョン)に拘らず効率的に追跡する物体追跡方法、物体追跡システム、及び物体追跡プログラムを提供する。
【解決手段】追跡される複数の物体の各々に対応して、物体の少なくとも1つの特徴を含む物体モデルを生成し、複数の物体を含み得るグループ画像を連続して撮影して取得し、物体の特徴に基づいて、得られたグループ画像に亘って物体モデルの各々の存在を探索し、各物体モデルに対する条件付き存在確率を計算し、条件付き存在確率が所定値以上の物体モデルを選択し、選択された物体モデルについてグループ画像内での対応する物体の場所を決定し、選択されなかった物体モデルに対して、存在確率の計算と場所の決定とを繰り返し行い、異なる時間に撮影したグループ画像に対して同様の処理を行い、追跡される物体とグループ画像内での場所の履歴を用いて、グループ内の各物体を追跡する。
(もっと読む)
1 - 20 / 27
[ Back to top ]