
Fターム[5L096GA57]の内容
Fターム[5L096GA57]に分類される特許
1 - 14 / 14
自動視覚事象検出の方法と装置
【課題】事象の自動視角検出のための方法及びシステムの提供
【解決手段】事象の画像を記録し、表示と、人間的または、自動分析のためにそれらを検索し、事象が検出される場合、外部装置へ同期された信号を送るための事象の自動視覚検出のための方法と装置が公開される。事象とは、撮像装置の視野内のある時間変化条件の中でも特定の条件に相当し、それは、事象が起こる二次元の視野のデジタル画像の取得、および分析に基づき視覚手段により検出され得る。事象は、分析のために画像を得ることが望まれる、まれな、短時間の機械の故障に相当する場合がある。事象は、視野の複数の画像の分析から得られた証拠を考慮することにより検出され、その間に機械構成要素の移動が複数の視点から見られ得る。
(もっと読む)
画像データ処理方法、画像データ処理装置及びプログラム

【課題】周波数解析などの手法を用いることなくより良好に補間画素を形成させることができるようにする。
【解決手段】第1の画素数の画像データを、前記第1の画素数よりも多い第2の画素数の画像データに変換する場合に、増えた画素を補間により形成させる補間画素形成処理を行う。その補間画素形成処理で補間して第2の画素数となった画像データの画素値をヒストグラム解析して、得られたヒストグラム内の各データの類似度から、画像データ内の各画素を複数の領域に分類させる領域分割処理を行う。また、その領域分割処理で分割された各領域のエッジ部分の補間画素を検出するエッジ検出処理を行う。そして、エッジ検出処理で検出されたエッジ部分の補間画素を、領域分割処理で得た同じ領域に属する近傍画素からの補間値とするエッジ画素値判定処理を行う。
(もっと読む)
オブジェクト領域の抽出システムおよび方法
【課題】ホワイトバランスにロバストでかつリアルタイム処理ができるオブジェクト領域の抽出システムおよび抽出方法を提供する。
【解決手段】オブジェクト領域の抽出システム1は、オブジェクトのカラー画像を取得するカラー画像取得手段2と、カラー画像から色度成分ヒストグラムおよび色相ヒストグラムを用いて第1のオブジェクト領域を抽出する第1のオブジェクト領域抽出手段31と、彩度ヒストグラムを用いて第2のオブジェクト領域を抽出する第2のオブジェクト領域抽出手段32と、輝度ヒストグラムを用いて第3のオブジェクト領域を抽出する第3のオブジェクト領域抽出手段33と、第1ないし第3のオブジェクト領域との重複領域をオブジェクト領域として求めるオブジェクト領域合成手段34とを備える。
(もっと読む)
マシンビジョンシステムの作動方法及びケース特有境界位置決めシステム
【課題】本発明は、複数の異なる画像特性に基づいたエッジ位置を正確に検出することができるマシンビジョンシステムの作動方法及びケース特有境界位置決めシステムを提供する。
【解決手段】マシンビジョンシステムの作動方法及びケース特有境界位置決めシステムは、テクスチャ、強度、色等の複数の異なる画像特性に基づいてエッジ又は境界の位置を正確に検出し位置決めする。ユーザは、例えば、テクスチャに基づいてエッジ発見演算(又は作動)を、場合によっては、従来の強度勾配エッジ位置決め作動によって実行する境界検出ツールを起動することができる。境界検出ツールは、捕捉された対象物の画像のエッジ又は境界を含む主な注目領域を規定する。境界検出ツールは、現在の対象物のエッジを位置決めし、また迅速且つ確実に将来の類似対象物の対応エッジを位置決めするのに用いることができる。
(もっと読む)
欠陥分類装置
【課題】主に半導体ウェハ及び液晶パネルのマクロ検査におけるレジストの塗付ムラや露光不良、キズ、塵埃の付着などの欠陥に関して、欠陥データの登録を必要とせず、より人間の判断に近い分類を可能にする欠陥分類装置を提供する。
【解決手段】被検体の画像を基に検出された欠陥の種類を判別する欠陥分類装置において、検出された欠陥領域の画像より特徴量を抽出する手段であって、少なくとも2つ以上の検出領域の配置形状に基づく特徴量を抽出する手段を含む特徴抽出手段102と、この特徴抽出手段102により抽出された特徴量に基づき、欠陥種を判別する推論判別手段106と、この推論判別手段106により判別された欠陥種が確定した領域を前記欠陥領域の画像から除外する確定領域除外手段107とを具備する。
(もっと読む)
画像内のオブジェクトを指示する方法
本発明は画像内のオブジェクトを指示する方法に関する。
本方法は:
−画像内のオブジェクト内部の点P1を指示するステップと、
−画像を基本領域へ分割するステップ(31)と、
−点P1が属する元の領域R1を識別するステップと、
−領域間の関連性のグラフを構築するステップ(32)と、
−様々な帰属の基準を組み合わせることにより、元の領域R1に接続された領域に対して、オブジェクトにおけるメンバーシップ関数を計算するステップと、
−そのメンバーシップ関数の値が所与のしきい値よりも大きい場合に併合される、その接続された領域と、元の領域R1を併合するステップ(33)と、
−接続された領域のメンバーシップ関数と、併合のメンバーシップ関数とを計算するステップが、併合が行なわれなくなるまで、各々の新たな併合された領域に対して繰り返されるステップとを含む。本発明はとりわけ、ユーザーにとって簡単な操作によって、オブジェクトのグラフィカルな指示を行なうための画像処理に関して適用される。
(もっと読む)
情報案内システムおよび情報案内プログラム
【課題】利用者が特別な装置を装着する等の負担がなく、高精度に利用者の種類を判別でき、判別された利用者の種類に応じた情報の案内を可能にする情報案内システムおよび情報案内プログラムを提供すること。
【解決手段】移動物を映像撮影装置により撮影し、該移動物の画像を動画領域として抽出し、例えば人間の顔部分や手部分を特定部位として抽出し、顔部分または手部分の移動方向、移動速度、移動範囲または顔部分と手部分との相対的位置関係を判別し、人間が白杖者であるか否か、または車椅子使用者であるか否かを判別することにより、その者に適した案内を出力する。
(もっと読む)
移動物体の追従装置及び同装置を備えた電動車椅子
【課題】 移動物体の追従装置は種々あるが、距離を計測するための方法として2台のカメラを用いたり、超音波センサを用いており、コスト高となり、又データ処理のアルゴリズムが複雑となる。
【解決手段】 一つの撮像装置(単眼)を用いることに最大の特徴があり、物体の撮像手段と、上記撮像手段により得られた画像情報を記憶する画像情報記憶手段と、上記画像情報記憶手段に蓄えられた画像情報より追従対象となる移動物体の追従対象領域を抽出する対象領域抽出手段と、上記対象領域抽出手段により得られた画像情報より上記移動物体に固有の特徴量を計測する特徴量計測手段と、上記特徴量計測手段の出力と上記画像情報より予め取りこまれた参照特徴量の値を比較する特徴量比較手段と、上記特徴量比較手段の出力により移動方向又は移動速度を決定する駆動信号発生手段と、上記駆動信号発生手段の出力により制御される駆動手段とを備えることにより解決できた。
(もっと読む)
画像の認識装置
【課題】超低レート伝送での動画像の伝送を可能としながら、再送モードの発生やピクチャーフリーズの発生を極力抑制する。
【解決手段】符号化制御部21,属性メモリ22,属性予測部23および領域抽出・認識処理部25を設ける構成とし、シンタックスの変更と符号語の置換,過去の符号化属性に基づく現フレームの符号化属性の予測と属性判定の適応制御,動きとモデルによる対象物領域抽出と領域別量子化制御,使用モードや伝送レートおよび動き発生量に応じた変換係数の有意個数の制御などを総合的に用いることにより、超低レート画像伝送を実現可能とした。また、現行の画像圧縮標準規格(H.261)に整合する構成を、プロトコル変換器を付設する簡単な構成で実現できるようにした。
(もっと読む)
緩徐相抽出方法及び眼振データ解析システム
【課題】 回転刺激が与えられていない場合の眼振データからも高精度に緩徐相の自動抽出を行う、信頼性の高い緩徐相抽出方法。
【解決手段】 本発明の緩徐相抽出方法は、眼振データにおいてファジー理論を適用して緩徐相を抽出する方法であって、n(nは2以上の整数)個目の眼振データと(n−1)個目の眼振データとの差分データを算出するステップ、前記差分データの絶対値に基づいてメンバーシップ値を決定するステップ、及び前記メンバーシップ値を所定の閾値と比較することによって緩徐相を抽出するステップを有する。
(もっと読む)
距離型図形推論システム
【課題】 図形情報を利用して概念を定量化し、図形間の距離情報、図形と特徴空間中のベクトルとの対応関係に基づいて図形推論を行う距離型図形推論システムを提供する。
【解決手段】 平面や空間における図形の形状や図形の位置などの特性を、互いに独立なパラメータで表し、このようなパラメータを特性パラメータ特性とし、パラメータと同じ数の独立な変数で構成されたユークリッド空間を特徴空間とし、意味や概念を表す図形を特徴空間へ写像すると、一つのベクトルになり、このベクトルを利用して意味や概念を定量化し、また特徴空間における事実変数図形と推論ルール中の対応した前件部変数図形との距離を計算し、この距離を用いて事実と各推論ルールの距離を計算し、空間図形と特徴空間中のベクトルの対応関係を利用して、特徴空間における後件部変数図形のベクトルおよび事実と各推論ルールの距離に基づいて、推論結果変数図形のベクトルを求めて図形推論を行う。
(もっと読む)
取得したデジタル画像での赤目検出方法及び装置
取得したデジタル画像での赤目検出方法であって、第1画像を取得し、この第1取得画像を画質を示す複数の特性を提供するために分析することを有する。そして、この処理は、1以上の補正処理をこの第1取得画像に対しこの特性にしたがって適用可能であるかを決定する。そして、任意のそのような補正処理をこの第1取得画像に適用する。そして、この補正した第1取得画像を使用して第2取得画像で赤目欠陥を検出する。欠陥検出は、1以上の赤目フィルターのチェーンをこの第1取得画像に対し適用することを有することができる。この場合では、この検出ステップの前に、赤目フィルターチェーンがこの複数の特性にしたがって適応可能であるかを決定し、また、それに応じてこの赤目フィルターを適応する。 (もっと読む)
識別方法、コンピュータプログラム及びコンピュータプログラム装置
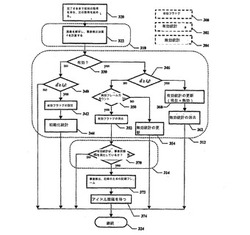
CTスキャン画像中の病巣と壁との間の接合の検出方法において、内部空間(L)に対して前記壁の境界(B)を決定し、前記境界に沿った特異点(c1 ,c2 )を識別し、及び前記壁と前記病巣との間の接合点として、病巣のどちらかの側の1つの特異点を選択することを特徴とする方法が提供される。特異点は、境界の極大曲率の点及び直線と湾曲部との遷移点であってよい。特異点は、病巣の両側の第1および第2シード点(p1 ,p2 )を受付け、それらが既に境界上にあるわけではない場合にシード点を境界に対して移動し、シード点に最も近い特異点を探索することによって選択されてよい。シード点は、決定された接合点(j1 ,j2 )を隣り合うスライス画像から現在のスライス画像に移すことで決定してよい。 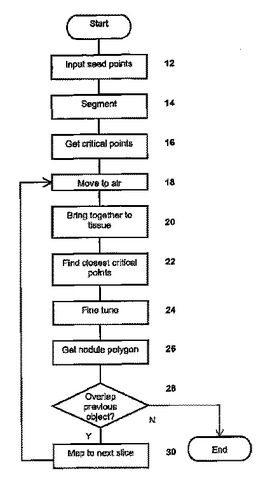 (もっと読む)
(もっと読む)
掌紋認証の方法
個人の手の一部分を含む画像を取得し、前記の手のさまざまな特性を定義する一つまたは複数の特徴パラメータを見出すために前記画像を解析し、前記特徴パラメータをデータベース中の参照情報と比較する、ことを含むことを特徴とする生体認証の方法。  (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]