
Fターム[5L096HA07]の内容
Fターム[5L096HA07]の下位に属するFターム
所定のパターンを見付けるもの (655)
与えられたパターンの種類を特定するもの (747)
Fターム[5L096HA07]に分類される特許
501 - 516 / 516
3次元測量装置及び電子的記憶媒体
[課題] 本発明は、測量装置と撮像装置とにより3次元座標データを演算するための3次元測量装置等に係わり、特に、測量装置により対応点の位置を決定し、ステレオ表示が可能な3次元測量装置を提供することを目的とする。
[解決手段] 本発明は、測量装置により計測された少なくとも3点の基準点の位置と撮像装置による画像とから、撮像装置の傾き等を算出し、測量装置により計測された視準点の位置から、撮像装置の傾き等を算出し、視準点を対応点として撮像装置の画像のマッチングを行い、測量装置が測定した視準点の位置と、マッチングを行った画像にある視準点とを関連付け、その関連付けに基づき測定対象物の3次元座標データを演算することができる。
(もっと読む)
画像処理装置、画像処理方法、露光装置、およびデバイス製造方法
【課題】 対象物画像中の対象物領域の誤認識が抑制された画像処理技術を提供すること。
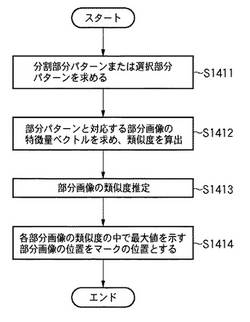
【解決手段】 対象物画像中の対象物の位置を求める画像処理装置は、対象物画像中の各部分画像および基準画像に関し、対応する部分領域毎に類似度を計算する第1の計算手段と、各部分画像に関し、第1の計算手段により計算された複数の類似度の統計値を計算する第2の計算手段と、第2の計算手段により計算された複数の統計値のうちの最大値に対応した対象物画像中の部分画像の位置を対象物の位置として認識する認識手段とを有する。
(もっと読む)
画像処理プログラム、画像処理装置、及び画像処理方法

【課題】 高速、かつ、高精度に対象画像内の所定の位置を検出する。
【解決手段】 グローバルパターン画像GPを構成する3枚のローカルパターン画像RP1〜RP3を記憶するパターン画像記憶部12と、ローカルパターン画像RP1〜RP3と原画像とのそれぞれの相関を示す相関値画像C1〜C3を生成する相関値画像生成部13と、相関値画像C1〜C3において相関の高い領域がグローバルパターン画像GPの中心Oに重なるように、相関値画像C1〜C3を移動させる移動部14と、相関値画像C1〜C3を重畳し、1枚の合成画像とする重畳部15と、合成画像から相関の高い領域検出し、対象画像内の所定の位置を検出する検出部16とを備える。
(もっと読む)
画像類似度算出システムおよび画像検索システム
加工処理が施された画像と元画像間の画像類似度を高い値として算出する画像類似度算出システムを提供する。局所領域重み値算出手段14は、画像の局所領域ごとに加工処理が施される確率にもとづいて画像の局所領域ごとの重み値を局所領域重み値として算出
し、算出された局所領域重み値を画像類似度算出手段122に出力する。小領域類似度算出手段121は、問合せ画像の分割された小領域ごとの特徴量と、参照画像の分割された小領域ごとの特徴量を比較して、各小領域ごとの特徴量の類似度を算出する。画像類似度算出手段122は、算出された各小領域ごとの特徴量の類似度に局所領域重み値算出手段14から入力される局所領域重み値から求められる小領域ごとの重み値を作用させて問合せ画像と参照画像の画像類似度を算出する。
(もっと読む)
画像の配向を検出するための方法及び装置
本発明は画像のセットの中の画像の配向を検出するための方法及び装置に関する。本発明によれば、本発明の方法は画像のセットの中から基準画像を選択するステップ、前記基準画像の配向の関数として前記画像の配向を検出するステップを含む。基準画像はアプリオリにその配向が知られている画像である。  (もっと読む)
(もっと読む)
適応型である点ベースの弾性的画像照合
本発明は、点ベースの弾性的照合パラディグムを改善することを目的とする。本発明によれば、例えば、正規分布形状の力を伴う力場が、変形される画像に対していくつかの点において適用される。この場合、ランドマークの一致が必要とされることはなく、ソース画像とターゲット画像との差を最小にする、力の適用点の最適な位置が自動的に見つけられる。有利には、これは個別の制御点の局所的な影響を制御することを可能にすることができる。 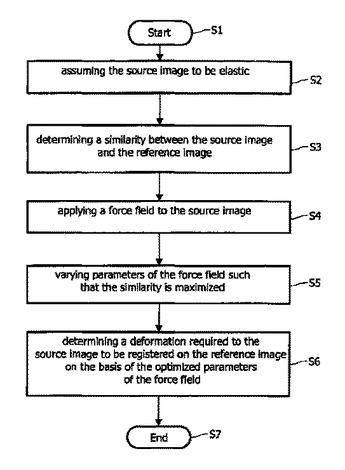 (もっと読む)
(もっと読む)
物体の状態を推定する推定システム、推定方法および推定プログラム
3次元モデル記憶手段(170)は、対象物体の3次元形状データおよび照明基底データを予め記憶する。比較画像生成手段(110)は、3次元形状データおよび照明基底データにもとづいて、入力画像と同じ照明条件の下で、現時点での推定値の位置/姿勢に対象物体がある再現画像を比較画像として生成する。画像変位分布検出手段(120)は、比較画像を部分画像(小領域)に分割し、小領域ごとに比較画像と入力画像との画像変位分布を検出する。姿勢差分検出手段(130)は、画像変位分布および3次元形状データにもとづいて位置姿勢差分値を算出する。そして、終了判定手段(140)は、位置姿勢差分値が所定の閾値より小さいと判断した場合に、現在の位置姿勢推定値を最適位置姿勢推定値(13)として出力する。これにより、画像に含まれる物体の位置や姿勢を高速に推定できるようになる。 (もっと読む)
監視装置
監視装置は、カメラ(101)で撮影された全体画像をフレーム毎に受けて全体画像に対してフレーム間差分処理、又は事前に用意された背景画像との背景差分処理を行う移動体画像生成部(102)と、差分処理された画像(移動体画像)を1次元情報に変換し、周波数分析を行って、移動物体または群衆の密集の度合いを示す密集度を算出する密集度算出部(103)と、所定日時の密集度に基づいて移動物体又は群衆の基準密集度(モデル値)を算出するモデル生成部(104)と、現時刻における密集度と基準密集度との比較を行って、現時刻における密集度が基準密集度と異なるか否かを判断して判断結果を生成して報知部(107)に与える状況判断部(106)とを備える。  (もっと読む)
(もっと読む)
嗜好データ処理装置及びプログラム
【課題】客の嗜好性を容易に把握することを可能とする。
【解決手段】嗜好データ処理装置10では、カメラ1a、1b〜na、nbによりテーブル上に配膳された食器及びテーブルに着いている客の画像が撮影され、撮影された食器画像から食器内の料理及び食べ残された料理が判定されて嗜好データとして客テーブル162に記憶されるとともに、客の画像から客の属性が判定され、その属性データが客テーブル162に記憶される。そして、客の属性データ、その客が飲食した料理名称及び食べ残された料理名称等の嗜好データがレポートとして印刷出力される。
(もっと読む)
Log−Polar変換を用いた画像マッチング方法、システムおよびプログラム
【課題】Log−Polar変換した画像マッチングにおいて、具体的な処理の実現方法を提供することを課題とする。
【解決手段】入力画像Xからはブロック画像Xkが抽出され、Log−Polar変換されてブロック画像LXkが生成される。テンプレート画像TはLog−Polar変換されてテンプレート画像LTが生成され、テンプレート画像LTを水平方向および垂直方向に展開したパターン画像PLTが生成される。このブロック画像LXkとパターン画像PLTの間で相関処理が行われる。パターン画像PLT上においてブロック画像LXkがマッチングした位置座標から対象物体の回転角度や拡大率が特定される。
(もっと読む)
画像の自動傾き及びサイズ補正方法
【課題】本発明は、画像に対する基準位置(トンボ)が存在しなくても
画像の比較を可能にし、かつ安定した再現性を得るための技術である。
【解決手段】上記の問題点を解決するために下記のような手段を採用した。
(1)検査対象画像及びレファレンス画像に対して膨張処理を行なう。
(2)膨張処理した検査対象画像及びレファレンス画像に対して画像を縮小する。
(3)検査対象画像を少し傾けて、検査対象画像及びレファレンス画像のX座標幅及びY座標幅が同じくなるように変倍処理を行なう。
(4)上記の(3)を所定角度範囲の所定ステップで繰り返し行なう。
(5)上記(3)及び(4)の各ステップにおいて、検査対象画像及びレファレンス画像の一致率を求める。
(6)一致率の一番大きい角度を、傾き補正値として選択する。
(もっと読む)
車載カメラの光軸ずれ検出装置
【課題】走行中の振動や周囲温度の変化などによって車載カメラの撮影光軸がずれた場合、そのずれ量を自動的に検出し、この検出に基づいて運転支援システムを動作させることができる車載カメラの光軸ずれ検出装置を提供すること。
【解決手段】フロントガラスなどに設けたマ−ク指標と、カメラ11の撮影画像からマ−ク指標の画像位置を選び、この画像位置情報をフレ−ムメモリに保存するカメラ制御部12と、フレ−ムメモリから読み出した基準となる画像位置情報と、新たに撮影されたマ−ク指標の画像位置情報を比較し、これら画像位置情報の差が所定の範囲内のときはフレ−ムメモリを新たな画像位置情報に更新し、所定の範囲外となるときは警告ブザ−などを起動させ、運転支援システム機能を停止させる車輌制御部14を備えた構成となっている。
(もっと読む)
人物認識装置、人物認識方法および通行制御装置
【課題】経年変化や認証時の入力情報のばらつきに対して本人の誤排除率を低下させることができる人物認識装置を提供する。
【解決手段】認識対象となる人物100の顔画像をカメラ101により入力し、この入力した顔画像と、あらかじめ認識対象となる人物の顔画像を登録情報として保持する登録情報保持部108に保持されている登録情報とを認識部109で照合することにより両者の類似度を求め、この求めた類似度に基づき当該人物を認識する人物認識装置において、登録情報更新部111は、認識部109において求められた類似度があらかじめ定められた所定の更新範囲内にあるか否かを判定し、当該類似度が所定の更新範囲内にあるとき、カメラ101で入力された顔画像に基づき登録情報保持部108に保持されている登録情報を更新する。
(もっと読む)
画像評価装置
【課題】ユーザが、被撮影者が良い表情である撮影画像を手軽にプリントして楽しむことができるようにする。
【解決手段】本発明に係るデジタルカメラ1によれば、CPU11aは、撮影された動画の各コマ画像の被撮影者の顔画像を抽出して、各顔画像毎に笑顔評価、端正評価を行い、各コマ画像について、その画像中の各被撮影者の総合笑顔評価値及び総合端正評価値を算出する。また、CPU11aは、コマ画像のうちの一つを解析し、撮影した画像の場面を判断し、当該撮影がカジュアルな場面の撮影であると判断すると、優先評価値を笑顔評価値として設定し、フォーマルな場面の撮影であると判断すると、優先評価値を端正評価値として設定し、優先評価値の高い順に各コマ画像に順位を設定する。そして、順位に基づいて各コマ画像をモニタ23に表示させる。
(もっと読む)
本人認証装置及びこれを備えた自動販売装置
【課題】無駄な画像データ処理を省き本人認証処理の効率化を図った本人認証装置を提供する。
【解決手段】購入者Aを撮像するカメラ2と、購入者Aの所持するICカードからなる身分証明用カードBに登録されている顔特徴量データ及び属性データを読取るカードリーダ3と、身分証明用カードBから読取った属性データから購入者Aが販売可能な条件を備えているか否かを判定し、販売可能と判定した時にカメラ2の撮像画像から生成した顔特徴量データと身分証明用カードBから読取った顔特徴量データとを照合して購入者Aがカード所有者本人か否かを判定する制御部4と、購入者Aとのインタフェース動作を行うユーザーインタフェース装置5とを備える。
(もっと読む)
光断層画像診断情報出力装置
【課題】 光断層画像を用いた光断層画像診断情報出力装置において、病理医による病理診断が不可能または困難であっても、迅速な病理診断を可能とする。
【解決手段】 ファイバカプラ121 において、光源部100 から出射された低コヒーレンス光を、被測定組織10に照射する信号光とピエゾ素子124 で周波数シフトされる参照光とに分割し、また被測定組織10の所定の深部で反射された信号光と参照光とを合波する。この合波された干渉光の信号強度をバランス差分検出部150 で検出し、信号処理部160 で画像処理を行い、被測定組織10の光断層画像を取得し、モニタ13および診断情報出力部180 に出力する。診断情報出力部180 ではこの光断層画像と、予め正常組織から取得して記憶部170 に記憶された基準光断層画像のパターンマッチングを行い、両形状パターンがほぼ一致する場合には被測定組織10が正常組織であるとモニタ13に出力し、表示する。
(もっと読む)
501 - 516 / 516
[ Back to top ]