
国際特許分類[A01B33/16]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 駆動回転具を有する耕うん用作業機 (988) | 特殊な付加装置を有するもの (33)
国際特許分類[A01B33/16]に分類される特許
1 - 10 / 33
排土板及び排土装置
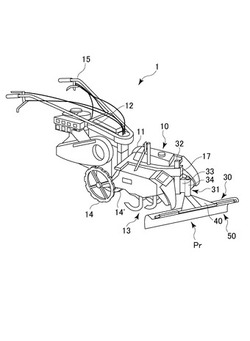
【課題】歩行型管理機を利用して、排土・整地作業が可能な排土板及び排土装置を提供する。
【解決手段】排土板30は、走行輪14,14'及び耕耘ロータ13が設けられた機体11を備える歩行型管理機10に装着され、この管理機の前進走行に伴って地面の土を排土する。排土板30は、歩行型管理機10の機体11に取り付けられる装着部31と、装着部31に接続されて歩行型管理機10の幅方向に延びて排土を歩行型管理機10の幅方向側方に移動させる排土板本体部50を有する。排土板本体部50の下部には、地面に対して略垂直方向に延びるエッジ部50aが形成される。排土装置1は、走行輪14の進行方向前側に耕耘ロータ13が設けられた歩行型管理機10と、この管理機の機体11に装着された排土板30とを備えてなる。
(もっと読む)
ロータリ耕耘装置

【課題】作物や農地や肥料に適した効率のよい施肥と耕耘とを実行できるロータリ耕耘装置を提供すること。
【解決手段】トラクタの後部に装着されて地面をすき起こすように、多数の耕耘爪が回転軸に装着されて設けられた回転耕耘爪ユニット14を備えるロータリ耕耘装置であって、トラクタの走行に伴って、回転耕耘爪ユニット14の前方にある表土を掬い上げて回転耕耘爪ユニット14の上方を経て回転耕耘爪ユニット14の後方へ落下させるように案内する案内板31と、案内板31の上方に肥料を貯留させる肥料ホッパー21を設けて肥料ホッパー21から案内板31の下方であって回転耕耘爪ユニット14の前方へ延ばした肥料供給管22とを備える。
(もっと読む)
耕耘同時施用機
【課題】施用パターンの変更が可能になり、特に土中のどの程度の深さに肥料や農薬を播くかを調整することができる。
【解決手段】一方向に進行しながら設定作業幅の耕耘を行い、耕耘された土壌中に粒材を施用する耕耘同時施用機1であって、進行方向に交差するロータリ軸21の周囲に土壌を進行方向に向けて切削する耕耘爪22が配備され、耕耘爪22でカットされた土壌がロータリ軸21上を介して進行方向後方に放出するアップカットロータリ部20と、アップカットロータリ部20が後方に放出させる土壌の中に粒材を導く粒材導出手段31を有する施用装置部30とを備え、粒材導出手段30は、設定幅の線状パターンで粒材を散粒させる散粒器31Bを備える。
(もっと読む)
歩行型耕耘機
【課題】泥除け板への泥の付着を抑制することのできる歩行型耕耘機を提供する。
【解決手段】歩行型耕耘機1は、下方に突出する伝動軸19を有するエンジン3と、エンジン3に取付けられて下方に伸び伝動軸19から伝達される回転を伝動軸19の軸方向と略垂直方向に延びる耕耘軸5から出力するギヤケース2と、ギヤケース2にフレーム4とハンドルブラケットを介して取付けられる操縦ハンドルと、耕耘軸5の回転動力により駆動される耕耘刃6と、エンジン3と耕耘刃6との間に設けられ、耕耘刃6に対向する面にフッ素を含有する樹脂が塗布されたフッ素樹脂コーティング面23を有する、耕耘刃6を覆う泥除け板7と、を備える。
(もっと読む)
農作業機
【課題】適切な耕耘整地作業ができる農作業機を提供する。
【解決手段】農作業機1は、耕耘作業をする耕耘体11と、この耕耘体11の上方部を覆うカバー体16とを備える。農作業機1は、耕耘体11の後方で整地作業をする整地体21と、耕耘体11の前方で砕土作業をする砕土体31とを備える。砕土体31は、カバー体16の前端部に取り付ける。砕土体31は、耕耘体11の前方で砕土作業をする砕土棒状部43を有する。
(もっと読む)
ロータリ耕耘機の溝切り装置
【課題】溝切りローラを一定姿勢で上下動可能にして、ロータリ耕耘機による畦ぎわからの耕耘作業を可能にした上で、適正な連続状の長溝を確実に形成できるようにする。
【解決手段】ロータリ機枠4の後部に支持枠14を後方突出状に設け、この支持枠14に上下一対の平行なリンク55、56を有する平行リンク具50の前部を連結し、この平行リンク具50の後部にキャスタ支持体51を設け、このキャスタ支持体51に耕耘跡を転動して連続状の長溝Lを形成する溝切りローラ7を設けている。
(もっと読む)
管理機
【課題】耕耘作業および培土作業を良好に行うことができる管理機を提供することを課題とする。
【解決手段】機体に回転自在に支持される車輪20と、前記機体に装着される耕耘装置30と、少なくとも一部(培土器40Aの前端)が車輪20の車軸21と耕耘装置30の耕耘軸31との間に位置するように配置される培土器40Aと、を具備する管理機1Aとして、耕耘装置30が上下方向へ移動する際、培土器40Aの少なくとも一部が同一方向へ移動するように構成する。
(もっと読む)
作業機のスタンド装置
【課題】 トラクタ車体2に載ったままでロータリ耕耘機等の作業機のスタンドを簡単に姿勢変更できるようにする。
【解決手段】 トラクタ車体2にリンク手段を介して装着される作業機にスタンド49が作業機を自立させるスタンド姿勢Xと上方へ回動して収納される収納姿勢Yとに姿勢変更自在に取り付けられており、前記スタンド49をスタンド姿勢Xから収納姿勢Yへと付勢するスタンド付勢手段73が設けられ、スタンド49を収納姿勢Yからスタンド姿勢Xへと姿勢変更させるように遠隔操作するケーブルが設けられ、前記ケーブルが連結された操作レバー86がトラクタ車体2上から操作可能になるように作業機側に設けられている。
(もっと読む)
駆動型対地作業機
【課題】 駆動型対地作業装置からトラクタ車体に伝達される振動を効果的に緩和吸収することができて、オペレータの居住性を良好になし得るようにする。
【解決手段】 トラクタ車体2の後部に連結装置3を介して駆動型対地作業装置を装着しており、
駆動型対地作業装置の対地反力による振動がトラクタ車体2に前記連結装置3を介して伝達されるのを緩和するように、前記連結装置3に、下端部が接地される振動吸収部材51が設けられ、該振動吸収部材51はその接地部側にバネ鋼で構成されかつ前端から後端にかけて下向き凸条に湾曲形成された弾性板54を有している。
(もっと読む)
ロータリー作業機
【課題】耕耘ムラを解消して平坦な耕耘地を形成するロータリー作業機を提供する。
【解決手段】土を耕耘する複数のロータリー爪(耕耘爪)45と、ロータリー爪45を外周に突出して設けた爪軸45aと、耕耘した土の飛散を抑制するためのロータリーカバー(耕耘カバー)46とを備え、トラクタ(自走式作業機)21の後部に連結してトラクタ21からの駆動力で駆動するロータリー作業機50において、耕耘土をトラクタ21の轍Tに導くための集土スクリュー(回転式誘導体)58を爪軸45aの前側でかつロータリーカバー46内に備え、集土スクリュー58がトラクタ21からの駆動力で駆動するようにする。
(もっと読む)
1 - 10 / 33
[ Back to top ]