
国際特許分類[A01C11/02]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 植付け;播種;施肥 (3,976) | 移植機械 (2,106) | 苗用のもの (1,857)
国際特許分類[A01C11/02]に分類される特許
131 - 140 / 1,857
作業車のエンジン制御構造
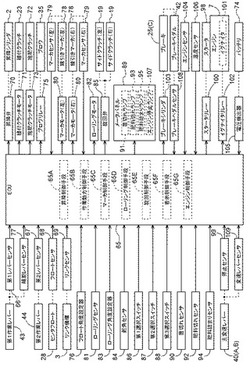
【課題】作業者の意思に関係なくエンジンが停止することによる作業効率の低下を防止しながら、エンジンの始動操作に伴って走行車体が不測に発進する不都合の発生を阻止できるようにする。
【解決手段】メインスイッチの操作に基づいて制御手段65が起動することで、制御手段65の作動によるエンジン7の始動操作と停止操作とが可能になるように構成した作業車のエンジン制御構造において、制御手段65が、エンジン停止用の操作具Aの操作に基づいて、エンジン7の停止操作を行うとともに、走行車体の走行を許容する走行許容状態と走行を阻止する走行阻止状態とに切り換え可能な走行切換手段Cを走行阻止状態に切り換えるように構成してある。
(もっと読む)
作業車両

【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
田植機のステアリングコラム
【課題】ステアリングシャフトとトルクジェネレータの連結部の錆付きを防ぐとともに、グリス注入を容易として作業性を向上させた田植機を提供する。
【解決手段】ステアリングハンドル軸53,55にステアリングコラム56を覆設したステアリングシャフト52の下端を、トルクジェネレータ58に連結部57を介して連結し、連結部57では、カラー59を装着したステアリングシャフト52の下端部を、取付フランジ61を介してトルクジェネレータ58に支持させ、カラー59は、トルクジェネレータ58の上面に接する底部周面に、開口部60を形成するとともに、取付フランジ61の底部にも開口部60と連通する開口部63を形成したものである。加えて、カラー側開口部60と、取付フランジ側開口部63のそれぞれを組立てることによって、ラビリンス形状Lを構成した。
(もっと読む)
田植機
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
作業車の供給物補給構造
【課題】作業装置の供給物補給高さ位置への無理な下降操作で作業装置が損傷するなどの不都合の発生を阻止する。
【解決手段】走行車体の後部に供給物を圃場に供給する作業装置を昇降可能に装備し、作業装置への供給物の補給を要する状態を検知した場合に、作業装置を作業高さ位置から予め設定した供給物補給高さ位置まで自動昇降させる補給用昇降制御を実行する制御手段を備えた作業車の供給物補給構造において、作業装置の接地を検知し、かつ、作業装置の高さ位置が供給物補給高さ位置よりも高いことを検知した状態で、作業装置への供給物の補給を要する状態を検知した場合には、制御手段が補給用昇降制御を実行しないように構成してある。
(もっと読む)
田植機
【課題】植付クラッチとロータクラッチを任意のタイミングで入切できる田植機を提供する。
【解決手段】植付クラッチ19bは、入切作動させる植付側操作アーム64と連動連結され、ロータクラッチ17cは、入切作動させるロータ側操作アーム65と連動連結され、前記植付側操作アーム64と前記ロータ側操作アーム65は、制御カム63に当接され、該制御カム63は、アクチュエータとなるクラッチモータ66により回転駆動され、該制御カム63の回転により前記植付クラッチ19bと前記ロータクラッチ17cをそれぞれ入切可能に構成されるものである。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
作業機のエンジン制御装置
【課題】エンジンの作動を停止させたのち、車体が急発進したりエンストを起す等の不利のない状態でエンジンを始動させることが可能となる作業機のエンジン制御装置を提供する。
【解決手段】キースイッチ以外の他の操作具の操作に基づいてエンジンの作動を停止させるエンジン自動停止処理、及び、エンジンの作動を停止させたのちにエンジンを始動させるエンジン自動始動処理を実行する制御手段Hが備えられ、制御手段Hが、他の操作具によるエンジン停止用操作が開始され且つ設定時間以上継続して行われたことが検出されると、エンジン自動停止処理を実行するように構成され、エンジン自動停止処理を実行したのちにおいて、走行停止操作検出手段STにて機体走行停止操作が行われたことが検出されると、エンジン自動始動処理を実行する。
(もっと読む)
田植機
【課題】植付部の昇降制御の追従性を向上させた田植機を提供する。
【解決手段】田植機は、植付部と、フロートセンサと、制御部と、を備えている。植付部は、地面に接触可能なフロートを備える。フロートセンサは、フロートの揺動角を検出する。制御部は、フロートセンサの出力値の微分値を制御量としたPID制御(ステップS103)により、植付部を昇降制御する。また制御部は、フロートセンサが検出したフロートの位置と、前記フロートの位置の目標値と、の差をフロートセンサの検出値に基づいて修正する(ステップS104)。
(もっと読む)
田植機のフロントアクスル部
【課題】フロントアクスル部の強度および作業性を向上させた移植機を提供する。
【解決手段】機体フレーム3上にミッションケース4を取付け、ミッションケース4の左右側面にフロントアクスル部55を連設するとともに、フロントアクスル部55は、フロントアクスルケース56と、フロントアクスルケース56の下方に設けた、車軸を覆設するベアリングケース59とを含み、フロントアクスルケース56の上端部を、機体フレーム3に固定した。
(もっと読む)
131 - 140 / 1,857
[ Back to top ]