
国際特許分類[A61B17/10]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 診断;手術;個人識別 (80,876) | 手術用機器,器具,または方法,例.止血器 (11,992) | 傷の閉鎖用,または傷を閉鎖把持するもの,例.手術用ステープル;それらと使用するための付属具 (2,011) | 傷口クランプを適用または取り去るためのもの;傷口クランプマガジン (186)
国際特許分類[A61B17/10]に分類される特許
1 - 10 / 186
電気式手術器具
【課題】可換部品がエンドエフェクタに配置されたときに認証を行うステープル装置を提供する。
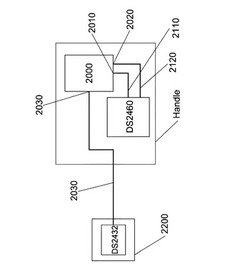
【解決手段】手術器具であって、可換部品2200を着脱可能に受ける受け部を有する手術用エンドエフェクタを具える。この受け部は通信接続を具える。エンドエフェクタに連結されたハンドルが、このエンドエフェクタを作動させる。このハンドルは、前記通信接続に電気的に接続され前記可換部品2200がエンドエフェクタに配置されたときに認証する制御部を具える。可換部品2200は、前記受け部に着脱可能に連結され、前記受け部に配置された場合に前記通信接続に電気的に着脱可能に接続される暗号化装置を具える。この暗号化装置は、前記電気制御部から問い合わせを受けた場合に前記可換部品を認証する。
(もっと読む)
外科手術用器具の細片収集システム

【課題】細片を医療用器具から除去するための、効率的かつ安価なデバイス、システムおよび方法を提供する。
【解決手段】細片収集システム100であって、細長本体110であって、第一の端部114、第二の端部112、および細長本体を通って延びる穴を有し、細長本体の第一の端部は、密閉状態で閉じられ、そして細長本体の第二の端部は開口部を有する、細長本体;細長本体に固定されるキャップ120であって、該キャップを通って延びる穴を有する、キャップ;ならびに細長本体に流体を導入するためのポート130であって、キャップに取り付けられる、ポート、を備える。
(もっと読む)
外科用器具のための方法および力制限ハンドル機構
【課題】組織への損傷を防ぐために、ハンドルアセンブリから端部エフェクターに伝達される力の量を制限する機構を組み込む外科用器具との使用のためのハンドルアセンブリを提供する。
【解決手段】作動する遠位端部分を有する外科用器具との使用のためのハンドルアセンブリ10であって:ハンドルハウジング12;該ハンドルハウジング内に移動可能に取り付けられ、そして作動遠位端部分に連結される駆動要素;該ハンドルハウジング内に位置決めされ、そして該駆動要素と係合可能であり、該ハンドルハウジング内で該駆動要素を移動させる駆動アセンブリ20;該ハンドルハウジング上に移動可能に取り付けられるアクチュエーター;および該駆動アセンブリと該アクチュエーターとの間に配置される力制限機構30であって、該アクチュエーターを該駆動アセンブリに離脱可能に連結する力制限機構、を備える、ハンドルアセンブリ。
(もっと読む)
調節機構を有する外科用ステープラー
【課題】外科的に組織を一緒に結合させるための締結具適用装置を提供する。
【解決手段】この装置は、ハンドルに取り付けられた近位端、遠位端、及びそれらの間の長手方向軸を有するステープルハウジングを含む。ハウジング内には少なくとも1つの締結具がある。この装置は、ハウジング内で可動なアンビルを含む。アンビルは近位位置及び遠位位置を有し、この遠位位置において、アンビルの遠位端は、ある距離によってステープルハウジングの遠位端まで遠位方向に延びる。装置は、ステープルハウジングをハンドルに接続する調節ナットを更に含み、この調節ナットの回転は距離を変える。
(もっと読む)
吻合デバイス及び吻合方法
【課題】縫合糸を用いた従来の手技による処置と吻合デバイスによる処置とを組み合わせた処置を簡単に行うことができる吻合デバイス及び吻合方法を提供すること。
【解決手段】吻合対象物を吻合する弾性を有する吻合デバイス1を次のように構成する。すなわち、前記吻合対象物の縫合処置に供された糸を糸留めするスリット5as,5bsが形成された突起部5a,5bを、吻合デバイス1に具備させる。
(もっと読む)
脱離ワッシャ取り付け部材を有する円形ステープリング機器
【課題】円形ステープリング機器のための装置を提供する。
【解決手段】円形ステープリング機器のためのステープリングカートリッジアセンブリは、ケーシングと、ステープルドライバと、ブレードと、を含む。ステープルドライバは、ケーシング内で受容可能であり、かつ発射前の位置から発射した位置までケーシング内で移動するように構成される。ブレードはステープルドライバに取り付け可能である。ブレードは、刃先と、ステープルドライバが発射前の位置から発射した位置まで移動されたとき、脱離ワッシャに固定して取り付けるための脱離ワッシャ取り付け部材と、を含む。
(もっと読む)
制御された組織圧迫システムおよび方法
【課題】制御された組織圧迫のためのシステムおよび方法を提供すること。
【解決手段】外科手術デバイスであって、該外科手術デバイスは、組織をクランプ、ステープルまたは切断するように構成されているエンドエフェクタと、該エンドエフェクタを駆動させるように構成されているモーターと、制御システムであって、該制御システムは少なくとも1つの組織特質に関する情報を受け取ることと、該少なくとも1つの組織特質に基づいて組織管理モードを選択することと、該モーターを該選択された組織管理モードに基づいて制御することとを行うように構成されている制御システムとを含む、外科手術デバイス。
(もっと読む)
外科用要素を移植するための最適組織圧縮時間を決定するための方法およびシステム
【課題】ステープルおよび縫合糸の最適形成のための組織への最適量の圧縮を提供するためのデバイスを提供する。
【解決手段】組織中への外科用要素の挿入の前に組織圧縮の最適量を決定する装置100であって、組織の圧縮に際し、組織パラメーターを検出するような形態の測定デバイス106を備え;そして、ここで、この測定デバイス106は、上記組織が所定の時間の間圧縮された後に閾値に到達し、そして外科医に該閾値の事象を示すインジケーター101を有し、そしてこの外科用要素は圧縮された組織に挿入され、ここで、この閾値が、示された時間の間にこの組織中に適正に形成されている外科用要素の指標であり、そして、ここで、この閾値の後に上記圧縮が持上げられ、上記外科用要素とともに上記組織が壊死なくして実質的に圧縮されない状態に戻る。
(もっと読む)
触覚フィードバックを有する外科用ステープラー
【課題】外科処置に関する改善されたフィードバックを有する改善された外科用ステープラーを提供する。
【解決手段】ステープラー100は、ハンドル102に一体化された、関連フィードバックを少なくとも触覚効果の形態でユーザーに生成するフィードバックシステムを含む。フィードバックシステムは、体内組織特性、すなわち、ステープラーのジョー108,109内に位置する体内組織又は他の構造部のタイプ、量又は厚さが選択されたステープラーカートリッジに適切であるかどうか、ステープルの適正な長さがジョー内に位置する体内組織の長さに基づいて発射されたかどうか、血管がステープラーのジョー内に位置しているかどうか、ステープル留めプロセスがステープラーのジョー内に位置する体内組織を支障なく密封したかどうか、切開要素の位置、及び/又はステープル留め処置又は発射サイクルが完了したときをユーザーに警報する。
(もっと読む)
外科手術用デバイス
【課題】クランプし、切断し、そしてステープル留めするデバイスの操作性を改善することを提供すること。
【解決手段】外科手術用デバイスは、ハンドルに結合されたシャフト部分を備え、このハンドルは、長手方向軸を規定する。この外科手術用デバイスはまた、第一の駆動シャフトを介して回転運動を起動するように構成された第一のドライバ、および第二の駆動シャフトを介して関節運動を起動するように構成された第二のドライバを備える。この外科手術用デバイスはまた、第一のダイヤルおよび第二のダイヤルを有する制御器を備え、この第一のダイヤルは、この第一のドライバを起動させるように構成され、そしてこの第二のダイヤルは、この第二のドライバを起動させるように構成される。この第二のダイヤルは、この第一のダイヤルの内部に配置される。
(もっと読む)
1 - 10 / 186
[ Back to top ]