
国際特許分類[A61B17/16]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 診断;手術;個人識別 (80,876) | 手術用機器,器具,または方法,例.止血器 (11,992) | 砕骨器;骨用ドリルまたはノミ;円鋸 (280)
国際特許分類[A61B17/16]の下位に属する分類
ドリル用案内具
国際特許分類[A61B17/16]に分類される特許
101 - 110 / 280
骨の内部を通って器具を誘導するためのシステムおよび方法
【解決手段】直線状カニューレまたはトロカールから配置する、配置可能で湾曲可能なチューブまたはカニューレを有し、チューブが入れ子式になった組立品を有するシステムおよび方法が提示される。湾曲カニューレはあらかじめ湾曲した遠位端を有することにより、直線状のトロカールから完全に配置された時に0°〜180°の角度範囲を形成する。湾曲部は、治療装置を搬送する柔軟性エレメントが湾曲カニューレの配置の角度範囲を経て誘導することができるよう構成されている。湾曲カニューレは、意図しない方向に逸れることなく、湾曲部を通って骨の内部に柔軟性エレメントを誘導することを可能とする。 (もっと読む)
遠隔操作型アクチュエータ

【課題】 先端に設けた工具の姿勢を遠隔操作で変更することができ、工具の姿勢を適正に保つことができる遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のスピンドルガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2とを備える。先端部材2は、工具1を保持するスピンドル13を回転自在に支持する。スピンドルガイド部3は、工具回転用駆動源41の回転をスピンドル13に伝達する回転軸22を有する。ガイド孔30a内に挿通された姿勢操作部材31を、姿勢制御用駆動源42で進退させる。姿勢制御手段53の初期姿勢保持制御部53aは、先端部材2を初期姿勢に保持する初期姿勢保持力を姿勢操作部材31に与えるように姿勢制御用駆動源42を制御する。姿勢変更制御部53bは、初期姿勢保持力よりも大きな力で先端部材2の姿勢を変更させるように姿勢制御用駆動源42を制御する。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長いパイプ部の先端に設けられた工具の姿勢を確実に遠隔操作で変更することができる遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のスピンドルガイド部3と、その先端に先端部材連結部15を介して姿勢変更自在に取付けられた先端部材2と、先端部材2に回転自在に設けた工具1と、工具1を回転させる工具回転用駆動源と、先端部材2の姿勢を操作する姿勢変更用駆動源とを備える。先端部材2は、工具1を保持するスピンドル13を回転自在に支持する。スピンドルガイド部3は、工具回転用駆動源の回転をスピンドル13に伝達する回転軸22と、両端に貫通したガイド孔30aとを内部に有する。先端が先端部材2に接して進退動作することにより先端部材2を姿勢変更させる可撓性の姿勢操作部材31をガイド孔30a内に進退自在に挿通する。姿勢操作部材31を、姿勢変更用駆動源で進退動作させる。
(もっと読む)
ブローチハンドル
【課題】本発明は、ブローチの固定/解除を行うための作動部を本体部から容易に取り外すことが可能なブローチハンドルを提供することを目的とする。
【解決手段】ブローチハンドル1は、ブローチ100と係合するハンドル本体部2と、作動部3と、ハンドル本体部2に設けられて作動部3を支持する支持部4と、作動部3を付勢する付勢部5と、を備える。作動部3は、所定量を超えて進出方向に移動すると支持部4から外れるように支持部4に取り付けられている。また、作動部3は、前記所定量を超えない進出方向への移動により先端軸部32がガイド穴23bを貫通して当該ガイド穴23bから突出する位置と、前記所定量を超えて進出方向に移動可能な位置と、の間で回動可能となるように支持部4に支持されている。
(もっと読む)
ブローチ及びブローチの製造方法
【課題】所定の形状であることを保証することが可能なブローチ、及び、当該ブローチの製造方法を提供する。
【解決手段】骨内に形成する髄腔の内面形状に対応した表面形状となるように原材料100を加工して、ブローチ素材101を得る。その後、ブローチ素材101の表面が刃の先端に残るように、当該ブローチ素材101を加工して複数の刃を形成して、ブローチ1を得る。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で変更することができ、パイプ部の剛性が高い遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のスピンドルガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、スピンドルガイド部3の基端が結合された駆動部ハウジングとを備える。先端部材2は、工具1を保持するスピンドル13を回転自在に支持する。スピンドルガイド部3は、外郭パイプ25と、駆動部ハウジング内の工具回転用駆動源の回転をスピンドル13に伝達する回転軸22と、両端に貫通した中空のガイドパイプ30とを有する。先端部材2を姿勢変更させる姿勢操作部材31をガイドパイプ30内に挿通し、姿勢変更用駆動源を駆動部ハウジング内に設ける。外郭パイプ25とガイドパイプ30とを固定したパイプ固定部70を設ける。
(もっと読む)
付属品シャフトの突出し長さの微調整または粗調整を容易にする連結アセンブリを有する、付属品のシャフトを回転させるための医学/外科用電動ハンドピース
モータを有するハンドピースと、ハンドピースのモータによって回転されるシャフトを有する切断付属品と、を備えている外科用ツールシステムである。ハンドピースは、付属品シャフトをハンドピースのモータによって作動される出力駆動シャフトに保持するための複数の係止要素を有する連結アセンブリを備えている。係止要素は、長手方向において互いに離間している。付属品シャフトには、保持特徴部が形成されており、該保持特徴部に対してハンドピースの係止要素が係合するようになっている。シャフトの保持特徴部は、列になって配置されている。互いに隣接する保持特徴部における保持特徴部は、長手方向において互いに位置ずれしている。これによって、付属品シャフトがハンドピースの連結アセンブリから前方に突き出す長さの粗調整または微調整を行うことができる。  (もっと読む)
(もっと読む)
遠隔操作型アクチュエータ
【課題】 先端に設けられた工具の姿勢を遠隔操作で変更することができ、工具が制御不能となった場合の安全対策がなされた遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のスピンドルガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、スピンドルガイド部3の基端が結合された駆動部ハウジングとを備える。先端部材2は、工具1を保持するスピンドル13を回転自在に支持する。スピンドルガイド部3は、駆動部ハウジング内の工具回転用駆動源の回転をスピンドル13に伝達する回転軸22と、両端に貫通したガイド孔30aとを内部に有する。先端部材2を姿勢変更させる姿勢操作部材31をガイド孔30a内に挿通し、姿勢変更用駆動源を駆動部ハウジング内に設ける。先端部材2がスピンドルガイド部3に対して中心線CL回りに回転するのを防止する回転防止機構37を設ける。
(もっと読む)
治療用モータ
【課題】治療用ハンドピースと治療用モータ間における回転軸まわりの軸方向の空間を遮断し、治療用モータのロータを支えるベアリングやモータ構成部品に治療用ハンドピース側からの塵埃が侵入しないようにする。
【解決手段】治療用モータ100は、端部に回転軸11を支持するベアリング15を有するモータシース10と、モータシース10に連結されたジャンクション20とから成り、該ジャンクションに治療用ハンドピース200を挿脱自在に装着し、該治療用ハンドピース200内の治療具に前記回転軸11の回転を伝達する。モータシース10とジャンクション20との連結部にシールリング50を有し、該シールリング50は、前記連結部をシールするとともに、前記回転軸まわりの軸方向の空間を遮断し、治療用ハンドピース200側からの塵埃がベアリング15やモータ構成部品に侵入するのを防止する。
(もっと読む)
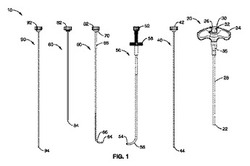
骨髄にアクセスする装置および方法
【課題】骨髄に貫入する装置および方法を提供する。
【解決手段】装置は、手持ち式本体などのハウジング、ペネトレータ・アセンブリ55、ペネトレータ・アセンブリ55をドリル・シャフトに解放自在に取り付けるコネクタ62、歯車機構、モータ、およびモータに動力を供給するように動作可能である電源および不随する回路を含む。ペネトレータ・アセンブリは、着脱式の内部トロカールおよび外部ペネトレータ52または針を含むことができる。装置を骨髄に挿入するにつれ、骨の破片を放出できるようにする溝付きトロカールも含むことができる。ペネトレータ・アセンブリ55をドリル・シャフトに取り付けるために、様々なコネクタ62が提供される。
(もっと読む)
101 - 110 / 280
[ Back to top ]