
国際特許分類[A63H27/28]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 玩具の飛行機;その他の飛行玩具 (291) | 玩具の羽ばたき飛行機 (33)
国際特許分類[A63H27/28]に分類される特許
21 - 30 / 33
羽ばたき飛行機
【課題】複雑かつ重量な駆動制御回路装置を要することなく、回転モータを高速回転駆動して大出力を得るとともに、回転モータが出力する大出力を大きな機械的損失を伴うことなく羽ばたき運動に変換することにより、パワー伝達効率に優れ、加えて高い羽ばたき振動数で羽ばたき運動することにより機敏な高機動飛行をすることができる優れた羽ばたき飛行機を提供する。
【解決手段】共振型羽ばたき飛行機において、羽ばたき翼がフラッピング振動およびフェザリング振動の2自由度において連成共振振動する翼振動系を構成し、フラッピング振動支軸で軸支された羽ばたき翼により円周方向に慣性力を発生する振動モータを支持して設け、前記振動モータが発生する慣性力によりフラッピング振動トルクおよびフェザリング振動トルクを得る。
(もっと読む)
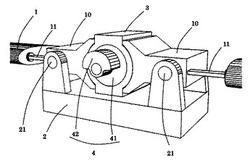
羽ばたき飛行機

【課題】極めて独創的・革新的な羽ばたき機構を有し、将来的には人間を搭乗させて飛行可能な比較的大型の羽ばたき飛行機を提供する。
【解決手段】機体10と、機体10に取り付けられた翼20と、翼20の羽ばたき運動を実現させる羽ばたき機構と、を備える羽ばたき飛行機1である。羽ばたき機構は、機体10に固定された斜め軸部材40F・40Rと、斜め軸部材40F・40Rに沿って往復移動するように構成されるとともに翼20の翼根部にヒンジ部を介して連結された移動部材41F・41Rと、移動部材41F・41Rを往復移動させる駆動部42と、機体10と翼20とを連結し翼20の翼根部から所定距離離隔した位置を支持する翼支持部材43F・43Rと、を有し、翼20のフラッピング運動と同時にリードラグ運動を実現させる。
(もっと読む)
羽ばたき翼の駆動機構の制御方法及び装置
【課題】運転状態が変化しても羽ばたき翼に作用する慣性力をキャンセルできるようにする。
【解決手段】小型飛行装置の胴体の左右に配した羽ばたき翼の基端側に設けた支軸を、胴体の左右両側位置に回転可能に支持させ、各支軸に取り付けたギアを互いに噛合させると共に、一方のギアには、翼駆動用モータ6に取り付けた駆動ギヤを噛合させて、翼駆動用モータ6により左右の羽ばたき翼を羽ばたき作動させることができるようにした駆動機構1を形成する。翼駆動用モータ6へ入力される電圧emに対して、羽ばたき翼の羽ばたき角に一致するギアの回転角度θ1の位相が−90度進みとなるように、翼駆動用モータ6へ入力させる電圧の周波数を制御させる。
(もっと読む)
浮上移動装置
【課題】羽根部の動作が安定した浮上移動装置を提供する。
【解決手段】浮上移動装置は、前縁部を有する羽根部と、前縁部に前後方向において回転往復運動をさせる上部ロータと、羽根部に前縁部まわりの捻り運動をさせるように、上部ロータの位相から所定値だけずれた位相で往復運動する下部ロータと、上部ロータおよび下部ロータのそれぞれを独立して制御する制御部と、上部ロータの回転角の位相と下部ロータの回転角の位相との差を所定の範囲内の値に制限するリミッター12322a,12322b,および12322cとを備えている。
(もっと読む)
ロボットおもちゃ
【課題】PCなど電子機器が備える、給電と信号送信双方が行えるコネクタを利用して、外部電源を用いることなく、煩雑な制御無しに動作するロボットおもちゃを提供する。
【解決手段】ロボット部に形状記憶合金を用いたアクチュエータを用い、電子機器から給電された電力を、共に送信される制御信号を利用して通電制御を行い、形状記憶合金に流れる電流を制御し、その動作を簡便に制御した。
(もっと読む)
浮遊体及び給電装置
【課題】 自ら羽ばたく浮遊体を得る。
【解決手段】 浮遊体31に主翼動力装置56を設ける。主翼動力装置56により主翼15に取り付けられたひも199を巻き取り、或いは、解き放つことにより、主翼15が羽ばたく。主翼動力装置56は、モータ65と歯車43,46と巻き取り軸196とから構成される。主翼15はトーションバネ583等が接続され、弾力性があり、常に一定の形を保とうとする復元力がある。従って、主翼15は、糸199により引っ張られて羽ばたいた後、モータ65を逆回転させることによって元の形状に戻る。これを繰り返すことにより自ら羽ばたく浮遊体を得ることができる。
(もっと読む)
凧
【課題】 凧が墜落する事象は恒常的であり、常識である。
本発明は、凧が墜落に至る根本原因を探究し、墜落しない凧の創造を目的とするものである。
【解決手段】 強弱自在に変化する風速と、構造上固定され自由のない凧との間に生ずる不協和現象が墜落である。
よって、風速に応じて形状を自在に変化させ、風速に同調する凧、即ち風速に反発しない凧の創造を以て解決する。
(もっと読む)
遠隔調整飛行体において速くて安定的な旋回が可能な水平尾翼の構造
迅速で安定的な旋回を成す遠隔調整飛行体の水平尾翼の旋回構造を提供する。前記水平尾翼の旋回構造1000は、胴体Dの上面に向かって配置されるサーボモーターと、前記サーボモーターの動力軸に結合される回転子220と、前記回転子の上面に結合されるもので、その他端が前記水平尾翼400と結合される連結部300とを有する。これにより、前記水平尾翼400は胴体の平面Pに対して回転する。  (もっと読む)
(もっと読む)
小型飛行装置
【課題】アクチュエータの負荷を軽減して羽ばたき飛行できるようにする。
【解決手段】胴体1の前部と後部の左右位置に、出力軸4にばね7による復元力を与えるようにしてなる翼駆動用モータ3を、上下方向角度変更可能に設ける。出力軸4に、駆動ロッド14と連結ロッド16と翼本体15からなる羽ばたき翼2a,2b,2c,2dを取り付ける。羽ばたき翼2a,2b,2c,2dを、翼駆動用モータ3と一緒に迎角の調整を行うと共に、羽ばたき翼2a,2b,2c,2dとその羽ばたき作動に同伴される空気並びに翼駆動用モータ3の可動部の慣性力と、ばね7の復元力が作る振動系の共振周波数で羽ばたき作動させるときの振幅を適宜調整することにより、発生させる後流の向きと強さを調整して、羽ばたき翼2a,2b,2c,2dごとに胴体1へ作用させる揚力と推進力のバランスを変化させて、ホバリングや前進飛行、左右旋回等を行わせる。
(もっと読む)
浮遊体
【課題】 空中静止(ホバリング)が可能な浮遊体を得る。
【解決手段】 基板部24にモータ195とホバリング機構290を取り付ける。モータ195により巻き取り軸196を回転させ、糸199を巻き取り、或いは、ほどくことにより、主翼15をD1、D2方向に回動させると伴に、主翼主骨33をR1、R2方向に回転させる。主翼15の回転と回動を繰り返すことにより、浮遊体99がホバリング可能になる。また、主翼15をモータに直結し、主翼15を時計回り、反時計回りに交互に回動させるとともに、回動の反転時に主翼主骨33をR1、R2方向に回転させることによって浮遊体99がホバリング可能になる。
(もっと読む)
21 - 30 / 33
[ Back to top ]