
国際特許分類[B23P19/06]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498) | 部品の組立て用,または分解用 (562) | ねじまたはナットの締付けまたは緩め機 (291)
国際特許分類[B23P19/06]に分類される特許
101 - 110 / 291
自動ねじ締め装置とその制御方法
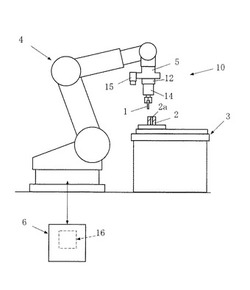
【課題】特性の異なる螺合部品(雄ねじ、ボルト、ナット等)であっても、ばね等の交換や、段取り等なしに、被螺合部(雌ねじ穴、雄ねじ部材等)にねじ締めを正確かつ確実に行うことができる自動ねじ締め装置とその制御方法を提供する。
【解決手段】ロボットアーム先端5に取り付けられ、これに作用する外力を検出する力センサ12と、力センサに取り付けられ、所定の螺合部品1を把持し所定の軸心を中心に回転駆動する把持回転装置14と、力センサで検出した軸方向の外力が予め設定した押付力となるようにロボットアーム先端5を力制御する力制御装置16とを備える。
(もっと読む)
バンパビーム取付け装置及びバンパビーム取付け方法

【課題】ナットランナやロボットの稼働率を高めることができるバンパビーム取付け技術を提供することを課題とする。
【解決手段】バンパビーム取付け装置10は、車両製造ライン11上を直列に搬送されてきた2個の車体12、13を対象とし、前側の車体12にリヤバンパビーム14を取付け、後側の車体13にフロントバンパビーム15を取付ける装置である。
【効果】バンパビームを運搬するロボットと、ボルトの締付けを行うロボットとを、別々に設けたので、ボルトの締付け作業中に、バンパビームの運搬を行わせることができる。したがって、ナットランナ及びロボットの稼働率を高めることができる。
(もっと読む)
ボルト締め付け装置
【課題】ボルトを締め込む際に付与する締め付け回転トルクを、より低減することができ、ボルトを締め込む際にもたらされるボルト軸力の高軸力化を図ることが可能なボルト締め付け装置を提供すること。
【解決手段】本発明のボルト締め付け装置は、締め付け回転トルク付与軸部と、該締め付け回転トルク付与軸部により付与された回転トルクをボルト頭部に伝達するとともにボルト座面に平行な横荷重をボルト頭部に付与する横荷重付与手段とを具備し、該横荷重付与手段は、締め付け回転トルク付与軸部からの回転トルクをボルト頭部に伝達する回転軸部と、外周面と内周面とを有し該外周面の中心軸線と内周面の中心軸線とが異なる偏心リングであって、該内周面が回転軸部の周囲に配設され回転軸部が回転される際に回転軸部の回転方向とは逆の方向に外周面の中心軸線まわりに回転する偏心リングを備える偏心移動機構部とを有する。
(もっと読む)
部品組付装置
【課題】本発明は、従来とは異なる方法でナットランナ同士の間隔を容易に変更することができる部品組付装置を提供する。
【解決手段】第1〜第5ナットランナ44、46、48、50、52を有する第1〜第5組付部34、36、38、40、42と、ねじ部98が形成された第2ボールねじ軸100と、を有し、ねじ部98には、第4組付部40に設けられた第1正ナット部120が螺合する第1正ねじ部112と、第2組付部36に設けられた第1逆ナット部122が螺合する第1逆ねじ部114と、第5組付部42に設けられた第2正ナット部124が螺合する第2正ねじ部116と、第1組付部34に設けられた第2逆ナット部126が螺合する第2逆ねじ部118とが設けられ、第2正ねじ部及び第2逆ねじ部116、118は、第1正ねじ部及び第1逆ねじ部112、114のピッチの2倍の大きさのピッチに設定されている。
(もっと読む)
ナットランナ用ボルト供給装置
【課題】簡素な構造でありながらチャック部に挟持されたボルトがソケットに連れられて回転することがないナットランナ用ボルト供給装置を提供することを目的とする。
【解決手段】パーツフィーダ11により供給されたボルト1を挟持するチャック部12と、前記チャック部12を開閉可能に駆動させるアクチュエータ13と、を備えるナットランナ用ボルト供給装置10において、前記チャック部12は、固設されて無可動である固定チャック12aと、前記アクチュエータ13により可動される可動チャック12bと、で構成されて、前記可動チャック12bは、前記ボルト1を挟持した際に前記ボルト1のネジ部と嵌合されるネジ溝部122bを備えるものとした。
(もっと読む)
ワーク整列システムおよびワーク移動方法
【課題】整列するワークの種類を容易に変更できるワーク整列システムを提供すること。
【解決手段】ワーク整列システム1は、ベルト22と、このベルト22をワーク供給位置P1とワーク排出位置P2との間で往復動させる駆動装置23と、を備える取り出し台20A、20Bと、4つのバケットB1〜B4と、これら4つのバケットB1〜B4のうちの1つを取り出し台20A、20Bのワーク供給位置P1の近傍に位置させる回転装置13と、を備える収容装置10A、10Bと、ワーク排出位置P2に位置するボルト11をワーク供給位置P1の近傍のバケットBに返却するシュータ70A、70Bと、ワーク供給位置P1の近傍のバケットBからボルト11を取り出して、ベルト22上のワーク供給位置P1に載置する第1ロボット40と、ベルト22上のワーク排出位置P2に位置するボルト11を把持して整列する第2ロボット50と、を備える。
(もっと読む)
部材着脱装置および部材着脱方法
【課題】部材を保持した状態で動きの自由度が高い部材着脱装置を提供すること。
【解決手段】締付装置1は、ねじSが着脱可能な締付部30と、この締付部30を進退させる進退機構20と、この進退機構20を回転させて締付部30を所定軸X上に移動するアーム10の先端フランジ部12と、アーム10に回転可能に設けられて締付部30に接続可能な押出部40と、この押出部40が所定軸X上に位置した状態で、押出部40をアーム10に固定可能なロック機構50と、を備える。ロック機構50により押出部40をアーム10に固定するとともに、先端フランジ部12により締付部30を所定軸X上に配置し、次に、進退機構20により締付部30を所定軸Xに沿って後退させて、この締付部30を押出部40に接続し、次に、ロック機構50を解除するとともに、進退機構20により締付部30をさらに後退させて、押出部40で締付部30を押し出す。
(もっと読む)
ワーク組立装置及びその制御方法
【課題】作業者が作業を行っていない作業部位を容易に認識可能とするワーク組立装置及びその制御方法を提供する。
【解決手段】ワークWを水平状態に支持するワーク支持部10の上方において、水平方向に移動可能な支持部材20に上下方向に移動可能に支持され、ワークWの複数の作業部位に作業を行う作業部30と、支持部材20にその一方端部が支持され、水平方向又は垂直方向に延びる延伸部材40から離間した位置において、前記複数の作業部位の位置に対応して配設される複数の被読取部と、延伸部材40に固定され作業部30の動きに伴い、前記被読取部に記憶された情報を読み取る読取部と、該読取部で読み取られた情報に基づいて、作業部30により作業が行われた作業完了部位及び作業が行われていない作業未完了部位を特定する特定部と、該特定部で特定された作業完了部位、作業未完了部位の少なくともいずれかを表示する表示部70と、を備えた。
(もっと読む)
ねじ締め機
【課題】安価で効率的にねじ締めを実現することができるねじ締め機を提供する。
【解決手段】ねじ締め機14は、支持体16と、任意の回転軸17、19回りで回転自在に、かつ、当該回転軸に平行に変位自在に支持体16に支持される揺動アーム18とを備える。揺動アーム18の先端にはドライバー21が固定される。揺動アーム18には、回転軸17に平行に延びる位置決めピン61が取り付けられる。支持体16には相対変位不能に位置決めガイドが配置される。回転軸17に平行に揺動アーム18が変位すると、位置決めガイドは位置決めピン61の変位を案内する。作業者の操作に基づくドライバーの位置決めは支援される。
(もっと読む)
ロボット教示システム
【課題】ロボットの教示作業に必要な時間を短縮することが可能なロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ツール13と、制御部20とを備えている。制御部20は、加工対象Wの図面データ25を読み込む図面データ読込部21と、位置領域情報36を入力する入力部22と、予め複数の図形ルートパターン37を蓄積させたパターン蓄積部38とを有している。通過位置設定部24は、図面データ25と、位置領域情報36と、図形ルートパターン37とに基づいてロボット11の通過位置を設定する。プログラム作成部31は、移動プログラム32を作成し、移動プログラム32は出力部33によりロボットコントローラ12へ送信される。
(もっと読む)
101 - 110 / 291
[ Back to top ]