
国際特許分類[B23P19/06]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498) | 部品の組立て用,または分解用 (562) | ねじまたはナットの締付けまたは緩め機 (291)
国際特許分類[B23P19/06]に分類される特許
61 - 70 / 291
ハンド及びロボット
【課題】把持したボルトをタップ穴に挿入することが可能なハンド及びロボットを提供する。
【解決手段】ハンド20は、1対の支持部22a、22bと、1対の支持部22a、22bの内側にそれぞれ支持され、ボルトBを把持する第1及び第2の把持爪21a、21bと、第1及び第2の把持爪21a、21bを各支持部22a、22bの長手方向と交差する揺動軸回りに揺動させ、第1及び第2把持爪21a、21bの先端の向きを変更させる揺動機構29と、第1及び第2の把持爪21a、21bが把持したボルトBをボルトBの軸回りに回転させるボルト回転機構30とを備える。
(もっと読む)
ソケットクイック交換アダプタ

【課題】ソケット交換作業の作業性を向上させることが可能なソケットクイック交換アダプタを提供する。
【解決手段】工具の回転軸20とソケット30との間に介装され、ソケット30をマグネット13の磁力で保持するとともに、ソケット30を回転軸20に対して相対回転不能に締結するソケットクイック交換アダプタ10であって、ソケット30が取り付けられるソケット取付面18cに、マグネット13のN極とS極とが交互に露出するようにマグネット13が複数配置される。
(もっと読む)
ボルト締結支持装置
【課題】ボルト締め付け作業の作業時間を短縮できるボルト締結支持装置を提供する。
【解決手段】作業者が締め付け工具70によってチェーンカバー101およびエンジン102にボルト100を締め付ける際に、ボルト100を支持してチェーンカバー101およびエンジン102のボルト孔105に案内するボルト締結支持装置10であって、締め付け工具70のソケット71の径と略同一であって、支持したボルト孔105とボルト100との軸心が一致するように形成されるボルト案内孔31と、ボルト案内孔31に近接して設けられる締め付け指示ランプ32と、複数のボルト100をチェーンカバー101およびエンジン102のそれぞれ複数のボルト孔105に締め付けるときには、適正な締め付け順序に基づいて、締め付け指示ランプ32によって、作業者が締め付けるボルト孔105を指示するコントローラ50と、を具備する。
(もっと読む)
自動ネジ締め装置
【課題】移送管の内壁を傷つけることが少なく、ネジの姿勢を安定させてドライバビットにネジを安定して供給し、ネジのネジ締め時間を短縮する自動ネジ締め装置を提供する。
【解決手段】螺合対象部位にネジ締めする自動ネジ締め装置において、ネジ供給機構には、ネジ移送機構の移送管内にはネジ頭部を先頭にして移送する排出部を設け、供給ヘッド部は水平に移動する移動アームが設けられ、供給ヘッド部はネジ締め機構の先端のドライバビット部に密接する密接位置と、ドライバビット部から離れた退避位置へと移動可能に設けられ、密接位置ではネジ締め機構の先端のドライバビット部に接続して、ネジ頭部を吸引してドライバビット部に係合するとともに、供給ヘッド部の適所には、上下方向の前記ネジ供給孔に連なって水平方向にネジ部のみが進退可能な縦溝が外部に開口するように設けられる。
(もっと読む)
自動ねじ締め機
【課題】高速低トルク駆動および低速高トルク駆動によるねじ締めを1つのモータで実現し、かつねじ締め完了時にドライバビットを逆回転させてねじとの食い付きを解除することが可能な自動ねじ締め機を提供する。
【解決手段】回転駆動源3の駆動に伴って回転する伝達軸4と、この伝達軸4の回転に伴って回転する出力軸13と、前記伝達軸4に直結して出力軸13へ回転伝達する高速低トルク伝達系と、前記伝達軸4からの回転を減速手段5を介して出力軸13へ回転伝達する低速高トルク伝達系と、これら双方の伝達系による差動回転を許容する双方向クラッチ10と、前記伝達軸4あるいは出力軸13に所定の負荷トルクが作用すると、高速低トルク伝達系を遮断するトルクリミッタ9とを備える自動ねじ締め機1による。
(もっと読む)
締結装置及び締結方法
【課題】締結穴の位置を広範囲において効率よく探索して位置ズレを修正でき、斜め噛み込みなどの不完全締結を防止できる締結装置を提供する。
【解決手段】自動ネジ締め装置100は、ネジ20を目的座標に移動させるXYZ軸方向駆動ロボット14と、上記目的座標を算出しXYZ軸方向駆動ロボット14に送信するロボット制御用コンピュータ17と、ネジ20が受けている、X−Y平面方向に働く反力値を計測し、ロボット制御用コンピュータ17に送信する力センサー16と、を備え、ロボット制御用コンピュータ17は、スパイラル演算部及び力制御演算部を備え、スパイラル演算部は、締結部品の移動軌跡がスパイラル状軌道となるように、目的座標のうちX−Y平面上の座標を算出するものであり、力制御演算部は、上記反力値が小さくなるように、目的座標のうちX−Y平面上の座標を算出するものである。
(もっと読む)
移動式ネジ締め機の制御方法
【課題】本発明は、PWM制御によるサーボ制御によって駆動する二軸移動用モータによりネジ締め機を位置決めする場合、ネジ締め機を作動させる間はサーボ制御をオフとし、ねじ締め時のサーボ制御による騒音発生を抑えることを目的とする。
【解決手段】本発明による移動式ネジ締め機の制御方法は、ネジ締め機(1)をサーボ制御(3)によって駆動される二軸移動モータ(2)を介してネジ位置(10)に移動した後、サーボ制御(3)をオフとし、このオフの期間(11)のみにネジ締め機(1)を作動させる方法である。
(もっと読む)
スタッド組付装置のソケット交換装置
【課題】一台のナットランナにより径の異なる二種類のスタッドボルトの組付作業を行えるようにした。
【解決手段】ワーク2,2aを取付けて平面上の一方向に移動可能な第1移動台3と、該第1移動台の上方で第1移動台の移動方向と直交する方向に移動可能な第2移動台4と、該第2移動台に上下方向に移動可能に設けられ、前記第1移動台上のワークに組付けられるネジ径の異なるスタッドボルトに対応する二種類のソケットを脱着可能なソケットホルダ7を有するナットランナ8とを備えたスタッド組付装置1において、前記各ソケットを前記ナットランナ8によりネジ込んで保持しておくための受けボルトを有するソケット置き台と、前記ナットランナのソケットホルダを受けるホルダ受け部と、ソケットホルダによるソケットの解放又は拘束を行うソケット脱着機構とを備えた。
(もっと読む)
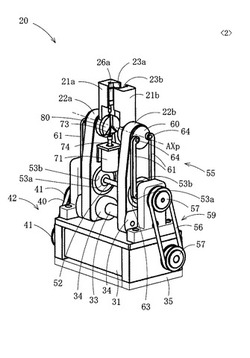
軸状ワーク供給装置
【課題】軸状ワークをマガジン内に収容する際に軸状ワークどうしの絡み合いの発生を抑制する軸状ワーク供給装置を提供すること。
【解決手段】軸状ワークWの収容マガジン30と、マガジン内の昇降体70と、昇降体を昇降させる流体圧シリンダ80とを備え、昇降体は、軸状ワークが傾斜により一方へ滑り落ちる供給部材90と、前後側面73、74とを有し、昇降体が、マガジン内の最上位レベルの軸状ワークよりも下方から上方に上昇することにより、軸状ワークが供給される軸状ワーク供給装置1において、平面視で、供給部材を軸状ワークが滑り落ちる方向と交わるマガジンの幅方向の中間位置に昇降体が配置され、マガジンに軸状ワークが補充される際に、昇降体は、前後側面を隔壁としてマガジン内の補充空間を幅方向に分割する高さに保持され、流体圧シリンダの作動に応じて、供給部材による傾斜の角度は、平坦から所定の角度までの間で変更可能である。
(もっと読む)
加工システム及び加工方法
【課題】ツールの交換の際の通信時間及びロボットの移動時間を短縮すること。
【解決手段】締め付け機25が取り付けられたロボット22は、ツール101,102を取り付ける取り付け部91,92を有している。ロボット23の腕部には、交換用のツール411,412を収納する収納部材401が設けられている。ロボット制御装置は、ロボット22,23の各々の動作を制御することによって、ツール101,102が取り付け部91,92に取り付けられ、ツール411,412が収納部材401に収納されている第1の状態から、ツール101,102が収納部材401に収納され、ツール411,412が取り付け部91,92に取り付けられている第2の状態に遷移させる。
(もっと読む)
61 - 70 / 291
[ Back to top ]