
国際特許分類[B23P19/06]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498) | 部品の組立て用,または分解用 (562) | ねじまたはナットの締付けまたは緩め機 (291)
国際特許分類[B23P19/06]に分類される特許
71 - 80 / 291
作業ユニット
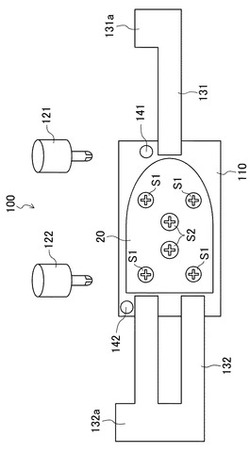
【課題】第1及び第2工具の誤使用を防止する。
【解決手段】作業ユニット100は、第1及び第2工具121,122と、第1及び第2シャッター部材131,132と、第1及び第2検知手段141,142と、第1検知手段141が、第1シャッター部材141がワーク20を覆っていることを検知したときのみ第1工具121を動作可能とすると共に、第2検知手段142が、第2シャッター部材131がワーク20を覆っていることを検知したときのみ第2工具121を動作可能とする工具管理部150とを備える。
(もっと読む)
自動ネジ締め装置

【課題】移送管の内壁を傷つけることが少なく、ネジの姿勢を安定させてドライバビットにネジを安定して供給し、ネジのネジ締め時間を短縮する自動ネジ締め装置を提供する。
【解決手段】ネジをネジ供給機構からネジ締め機構の空気吸引によるネジ移送機構によってネジ締め機構に移送して、ドライバビット部にネジを係合してネジ締めする自動ネジ締め装置において、ネジ供給機構には、ネジ移送機構の移送管内にはネジ頭部を先頭にして移送する排出部を設け、排出部には回動アームを設け回動アームの先端にはネジ締め機構の先端のドライバビット部に密接する供給ヘッド部を設け、供給ヘッド部はネジ締め機構の先端のドライバビット部に密接する密接位置と、ドライバビット部から離れた退避位置へと移動可能に設けられ、密接位置ではネジ締め機構の先端のドライバビット部に接続して、ネジ頭部を吸引してドライバビット部に係合する自動ネジ締め装置である。
(もっと読む)
加工システム及び加工方法
【課題】組み付け部品の破損を防止すること。
【解決手段】把持機24が取り付けられたロボット23は、ロアサッシュ32を把持し、当該ロアサッシュ32をドア31まで移動させる。締め付け部25が取り付けられたロボット22は、ボルトをドア31まで移動させ、ドア31及びロアサッシュ32の各々に設けられたボルト穴にボルトを挿入して締め付ける。ロボット制御装置12は、ロボット22,23のうち少なくとも一方の動作の制御として、ロアサッシュ32がドア31に当接した当接状態になった後に、ロアサッシュ32とドア31との所定の関係が一定に保たれる倣い制御、具体的には力覚センサ64により検出される押し付け量が一定に保たれる倣い制御を実行する。
(もっと読む)
部品移送装置
【課題】部品を所定供給位置から確実に取上げて所定移送先位置に移送する部品移送装置を提供することにある。
【解決手段】部品を自動的に所定供給位置から取上げて所定移送先位置に移送する部品移送装置であって、前記部品を圧縮エアで吸着保持する吸着ヘッドと、前記吸着ヘッドを移動させる吸着ヘッド移動手段と、前記圧縮エアの圧力を検出するエア圧センサと、前記吸着ヘッドを前記所定供給位置にその真上から接近移動させた後、前記エア圧センサの出力信号の変化状態に基づき前記吸着ヘッドが前記部品を吸着したか否かを判断し、前記部品を吸着しない場合は、前記吸着ヘッドを上下方向に僅かに往復移動させ、次いで互いに直交する水平な2方向へ僅かに往復移動させ、前記接近移動、前記上下移動および前記水平移動の何れかによって前記部品を吸着した場合は前記吸着ヘッドを前記所定移送先位置に移動させる作動制御手段と、を具えてなる部品移送装置である。
(もっと読む)
軸状ワーク供給装置
【課題】軸状ワークをマガジン内に収容する際に軸状ワークどうしの絡み合いの発生を抑制する軸状ワーク供給装置を提供すること。
【解決手段】軸状ワークWを収容するマガジン30と、マガジン内に設けられる昇降体70と、昇降体を昇降させる流体圧シリンダ80と、を備え、昇降体は、上面にある軸状ワークが傾斜により一方へ滑り落ちる供給部材90と、前側面73および後側面74とを有し、昇降体が、マガジン内の最上位レベルの軸状ワークよりも下方からそのレベルよりも上方に上昇することにより、供給部材を経由して軸状ワークが供給される軸状ワーク供給装置1において、平面視で、供給部材を軸状ワークが滑り落ちる方向と交わる方向としてのマガジンの幅方向における中間位置に昇降体が配置され、マガジンに軸状ワークが補充される際に、昇降体は、前側面および後側面を隔壁としてマガジン内の補充空間を幅方向に分割する高さに保持される。
(もっと読む)
自動ビス締め機
【課題】自動ビス締め機においてビスを捩じ込む際のビスの先端の振れを抑える。
【解決手段】ビス18の頭部に係合してビス18のねじ部18Aを対象物に捩じ込むドライバービット20を備え、ドライバービット20の回転及び前記対象物と接離する方向の移動を行う自動ビス締め機において、ビス18の頭部を円弧溝に接触させ、ねじ部18Aの中間部を送り爪に接触させ、ねじ部18Aの先端側をスライドガイド76のガイド溝78に挿入することで、ねじ部18Aの先端側の振れが阻止される。
(もっと読む)
締め付けツール及び自動締め付け装置
【課題】ボルト軸の先端形状に依存せずにナットの中心軸とボルトの軸心との位置ずれを吸収可能で、且つ吸収可能な位置ずれの範囲を広く設定可能な締め付けツールの提供。
【解決手段】ナット収容端部22がボルト軸11に対して上方へ移動し、ボルト軸11の先端がナット14のネジ孔15に挿入されずにナット14又はナット収容端部22に当接して押圧すると、エクステンションソケット3の上下位置が維持されたまま、エクステンションバー2及び板バネ部材6がスプリング5の付勢力に抗して上方へ移動し、ナット収容端部22に収容されたナット14のネジ孔15の中心軸16がボルト軸11の軸心12に向かって傾くように、板バネ部材6の傾斜部28がエクステンションソケット3を傾動させ、ナット14のネジ孔15にボルト軸11の先端が挿入される。
(もっと読む)
ネジ締めドライバ、ネジ締め装置及び方法
【課題】 ネジ締め時にネジの負圧吸引を停止することでスリーブをネジ頭部から離間させることのできるネジ締めドライバを提供することを課題とする。
【解決手段】 ネジ締めドライバのビットハウジング34は、回転駆動機構30に取り付けられたドライバビット32を収容する。スリーブ36はビットハウジング34内に配置され、回転駆動機構30に取り付けられたドライバビット32が延在するビット孔36cを有する。ビットハウジングに対してスリーブを回転駆動機構に向かう方向に付勢する弾性体38が、ビットハウジング34内に設けられる。ビットハウジング34の外周に設けられた吸引通路は、ビット孔36cの内部空間に接続される。
(もっと読む)
締結装置
【課題】ナットランナを備える締結装置において、ナットランナを利用することにより、複数のソケット体を支持するホルダの傾倒を発生させる傾倒モーメントを減少させる。
【解決手段】締結装置1のソケット支持機構20は、回転軸54との係合が可能な位置まで各ソケット体30が移動するようにホルダ21を駆動する駆動部材22を備える。ランナ移動用駆動部材60は、係合状態にある回転軸54を前進方向に移動させることで、ソケット体30をホルダ21に対して前進方向に移動させ、ボルト4をワーク側締付部2cに当接させる。回転軸54は、駆動部材22におけるホルダ21との結合部25aに対して特定位置に配置される。前記特定位置は、ソケット体30の重量により結合部25aを中心としたホルダ21の傾倒を生じさせるモーメントMを、ランナ移動用駆動部材60が係合状態の回転軸54を前進方向に移動させる駆動力により減少させる位置である。
(もっと読む)
ボルト締め付け方法及びボルト並びに前記方法を実施するためのボルト締め付け装置
【課題】可能な限り少コストで高い予付勢力をボルトにもたらす。
【解決手段】互いに締結すべき機械部品90,91を貫通するボルト21であって、機械部品91の片面で支持されているボルト頭部23と、ボルト締め付け装置60と螺合するために設けられているボルト端部24とを有しているボルト21の締め付け方法において、ボルト端部24が雄ねじ18と端面27からボルト軸線に沿って延在する少なくとも1つの雌ねじ20と有しているボルト21で、全予付勢力の一部分を雄ねじ18を介して、のこりの部分を雌ねじ20を介してボルト21へもたらす。
(もっと読む)
71 - 80 / 291
[ Back to top ]